Raster Venus and Lunar Maps As a Source for Obtaining Vector Topographic Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2015 Department Newsletter (PDF)
2015 Newsletter Earth, Planetary, AND Space Sciences GREETINGS FROM THE CHAIR The rhythms of academia flow from Fall back around to Summer, and sometimes don't harmonize well with the IN THIS ISSUE calendar year (especially at its often frantic end). And so, for those of you who missed our annual Earth, Planetary, and Space Sciences newsletter in December, I offer my apology and an assurance that your beloved department 2 FROM THE CHAIR is still alive and doing well. On behalf of all the current denizens of the Geology Building and Slichter Hall, I extend to you, our alumni family, happy greetings for Spring 2016! I hope that you will enjoy seeing here a few highlights 3 PANORAMA from the past year in Westwood. Along with the changing seasons, come some changes in our faculty. 4 DAWN COMES TO CERES We are excited to welcome geologist Seulgi Moon. Born in a small town in South Korea, our newest Assistant Professor received her PhD at Stanford and comes to UCLA following a postdoc at MIT. You can read 6 NEW FACULTY about her research on surface processes on page 6. After decades of outstanding research achievements, Professors Bruce Runnegar and 8 AROUND THE John Wasson decided to officially retire, although both continue to come DEPARTMENT to the department daily, conducting research and interacting with students. Unfortunately (for us) the lure of native lands proved too 9 IN THE FIELD WITH much for Ed Rhodes and Axel Schmitt, who left for faculty positions in the PROF AN YIN U.K. and Germany, respectively. -

Historical Painting Techniques, Materials, and Studio Practice
Historical Painting Techniques, Materials, and Studio Practice PUBLICATIONS COORDINATION: Dinah Berland EDITING & PRODUCTION COORDINATION: Corinne Lightweaver EDITORIAL CONSULTATION: Jo Hill COVER DESIGN: Jackie Gallagher-Lange PRODUCTION & PRINTING: Allen Press, Inc., Lawrence, Kansas SYMPOSIUM ORGANIZERS: Erma Hermens, Art History Institute of the University of Leiden Marja Peek, Central Research Laboratory for Objects of Art and Science, Amsterdam © 1995 by The J. Paul Getty Trust All rights reserved Printed in the United States of America ISBN 0-89236-322-3 The Getty Conservation Institute is committed to the preservation of cultural heritage worldwide. The Institute seeks to advance scientiRc knowledge and professional practice and to raise public awareness of conservation. Through research, training, documentation, exchange of information, and ReId projects, the Institute addresses issues related to the conservation of museum objects and archival collections, archaeological monuments and sites, and historic bUildings and cities. The Institute is an operating program of the J. Paul Getty Trust. COVER ILLUSTRATION Gherardo Cibo, "Colchico," folio 17r of Herbarium, ca. 1570. Courtesy of the British Library. FRONTISPIECE Detail from Jan Baptiste Collaert, Color Olivi, 1566-1628. After Johannes Stradanus. Courtesy of the Rijksmuseum-Stichting, Amsterdam. Library of Congress Cataloguing-in-Publication Data Historical painting techniques, materials, and studio practice : preprints of a symposium [held at] University of Leiden, the Netherlands, 26-29 June 1995/ edited by Arie Wallert, Erma Hermens, and Marja Peek. p. cm. Includes bibliographical references. ISBN 0-89236-322-3 (pbk.) 1. Painting-Techniques-Congresses. 2. Artists' materials- -Congresses. 3. Polychromy-Congresses. I. Wallert, Arie, 1950- II. Hermens, Erma, 1958- . III. Peek, Marja, 1961- ND1500.H57 1995 751' .09-dc20 95-9805 CIP Second printing 1996 iv Contents vii Foreword viii Preface 1 Leslie A. -

Ancient Carved Ambers in the J. Paul Getty Museum
Ancient Carved Ambers in the J. Paul Getty Museum Ancient Carved Ambers in the J. Paul Getty Museum Faya Causey With technical analysis by Jeff Maish, Herant Khanjian, and Michael R. Schilling THE J. PAUL GETTY MUSEUM, LOS ANGELES This catalogue was first published in 2012 at http: Library of Congress Cataloging-in-Publication Data //museumcatalogues.getty.edu/amber. The present online version Names: Causey, Faya, author. | Maish, Jeffrey, contributor. | was migrated in 2019 to https://www.getty.edu/publications Khanjian, Herant, contributor. | Schilling, Michael (Michael Roy), /ambers; it features zoomable high-resolution photography; free contributor. | J. Paul Getty Museum, issuing body. PDF, EPUB, and MOBI downloads; and JPG downloads of the Title: Ancient carved ambers in the J. Paul Getty Museum / Faya catalogue images. Causey ; with technical analysis by Jeff Maish, Herant Khanjian, and Michael Schilling. © 2012, 2019 J. Paul Getty Trust Description: Los Angeles : The J. Paul Getty Museum, [2019] | Includes bibliographical references. | Summary: “This catalogue provides a general introduction to amber in the ancient world followed by detailed catalogue entries for fifty-six Etruscan, Except where otherwise noted, this work is licensed under a Greek, and Italic carved ambers from the J. Paul Getty Museum. Creative Commons Attribution 4.0 International License. To view a The volume concludes with technical notes about scientific copy of this license, visit http://creativecommons.org/licenses/by/4 investigations of these objects and Baltic amber”—Provided by .0/. Figures 3, 9–17, 22–24, 28, 32, 33, 36, 38, 40, 51, and 54 are publisher. reproduced with the permission of the rights holders Identifiers: LCCN 2019016671 (print) | LCCN 2019981057 (ebook) | acknowledged in captions and are expressly excluded from the CC ISBN 9781606066348 (paperback) | ISBN 9781606066355 (epub) BY license covering the rest of this publication. -

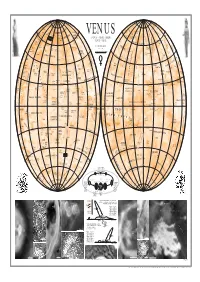
VENUS Corona M N R S a Ak O Ons D M L YN a G Okosha IB E .RITA N Axw E a I O
N N 80° 80° 80° 80° L Dennitsa D. S Yu O Bachue N Szé K my U Corona EG V-1 lan L n- H V-1 Anahit UR IA ya D E U I OCHK LANIT o N dy ME Corona A P rsa O r TI Pomona VA D S R T or EG Corona E s enpet IO Feronia TH L a R s A u DE on U .TÜN M Corona .IV Fr S Earhart k L allo K e R a s 60° V-6 M A y R 60° 60° E e Th 60° N es ja V G Corona u Mon O E Otau nt R Allat -3 IO l m k i p .MARGIT M o E Dors -3 Vacuna Melia o e t a M .WANDA M T a V a D o V-6 OS Corona na I S H TA R VENUS Corona M n r s a Ak o ons D M L YN A g okosha IB E .RITA n axw e A I o U RE t M l RA R T Fakahotu r Mons e l D GI SSE I s V S L D a O s E A M T E K A N Corona o SHM CLEOPATRA TUN U WENUS N I V R P o i N L I FO A A ght r P n A MOIRA e LA L in s C g M N N t K a a TESSERA s U . P or le P Hemera Dorsa IT t M 11 km e am A VÉNUSZ w VENERA w VENUE on Iris DorsaBARSOVA E I a E a A s RM A a a OLO A R KOIDULA n V-7 s ri V VA SSE e -4 d E t V-2 Hiei Chu R Demeter Beiwe n Skadi Mons e D V-5 S T R o a o r LI s I o R M r Patera A I u u s s V Corona p Dan o a s Corona F e A o A s e N A i P T s t G yr A A i U alk 1 : 45 000 000 K L r V E A L D DEKEN t Baba-Jaga D T N T A a PIONEER or E Aspasia A o M e s S a (1 MM= 45 KM) S r U R a ER s o CLOTHO a A N u s Corona a n 40° p Neago VENUS s s 40° s 40° o TESSERA r 40° e I F et s o COCHRAN ZVEREVA Fluctus NORTH 0 500 1000 1500 2000 2500 KM A Izumi T Sekhm n I D . -

Dale L. Sullivan Educational Background
Vita of Dale L. Sullivan, 2015 Dale L. Sullivan Professor of English Department of English NDSU, Dept. 2320 P.O. Box 6050 Fargo ND 58108-6050 Phone 701.231.7144, E-Mail [email protected] Educational Background: • Ph. D. in Rhetoric and Communication, Rensselaer Polytechnic Institute, Troy, New York, 1988. Dissertation: A Rhetoric of Children's Literature. Director: S. Michael Halloran. Focus on C. S. Lewis’ Chronicles of Narnia and his reading theory. • Master of Arts in English, Wichita State University, Wichita, Kansas, 1979. Masters thesis on C. S. Lewis’ The Great Divorce. • Bachelor of Arts, St. Mary of the Plains College, Dodge City, Kansas, 1977. Major-English; Minor-French. Magna Cum Laude. Professional Experience: North Dakota State University, Fargo, ND. Tenured, Professor of English, July 2003 to present. • Returned to faculty, June 2010. • Department Head, July 1, 2003 to June 30, 2010. Assumed faculty status fall 2010. o Responsible for scheduling classes; hiring, directing graduate studies; overseeing budget; evaluating faculty, lecturers, staff; assigning advisors, writing annual reports. o Worked with faculty to fully reform of English Curriculum, 2004- 05. o Worked with Director of Writing and General Education Committee to reform writing requirements at university—from traditional first-year sequence to vertical writing sequence. This process involved the development of several new discipline-specific writing courses. o Worked with Provost and English faculty to bring languishing writing center under direction of English department. It is now flourishing. o In consultation with faculty, rewrote our department’s proposal for a Ph. D. in Rhetoric, Writing & Culture. Ph.D. has now been approved by the State Board of Higher Education o Encouraged the development of online classes and participation in distance and continuing education. -

View the 2021 Tufts University Commencement Program (PDF)
165TH Commencement Tufts University Sunday, May 23, 2021 Commencement 2021 Commencement 2021 School of Arts and Sciences School of Engineering School of Medicine and Graduate School of Biomedical Sciences School of Dental Medicine The Fletcher School of Law and Diplomacy Cummings School of Veterinary Medicine The Gerald J. and Dorothy R. Friedman School of Nutrition Science and Policy Jonathan M. Tisch College of Civic Life University College #Tufts2021 commencement.tufts.edu Produced by Tufts Communications and Marketing Printed on recycled paper Table of Contents Welcome from the President 5 University Commencement 7 Dear Alma Mater 10 Tuftonia’s Day Academic Mace Academic Regalia Recipients of Honorary Degrees 11 School of Arts and Sciences 15 Graduate School of Arts and Sciences School of Engineering School of Medicine 43 Graduate School of Biomedical Sciences 48 Public Health and Professional Degree Programs 52 School of Dental Medicine 59 The Fletcher School of Law and Diplomacy 67 Cummings School of Veterinary Medicine 73 The Gerald J. and Dorothy R. Friedman 79 School of Nutrition Science and Policy Jonathan M. Tisch College of Civic Life 83 COMMENCEMENT 2021 3 Welcome from the President Commencement is the high point of the academic year and has always been a special day at Tufts. While this year’s virtual celebration makes us less anxious about the weather forecast, this moment is no less extraordinary and no less distinguished. After a period of rigorous study, intellectual pursuit, and personal growth, our students stand ready to graduate from their respective academic programs and this great university. Today, we celebrate their achievements and recognize all those who have helped make this day possible. -
1 : 45 000 000 E a CORONA D T N O M E Or E ASPASIA T Sa MM= KM S R
N N 80° 80° 80° Dennitsa D. 80° Y LO S Sz um U N éla yn H EG nya -U I BACHUE URO IA D d P ANAHIT CHKA PLANIT ors Klenova yr L CORONA M POMONA a D A ET CORONA o N Renpet IS r I R CORONA T sa T Mons EG FERONIA ET L I I H A . Thallo O A U u Tünde CORONA F S k L Mons 60° re R 60° 60° R a 60° . y j R E e u M Ivka a VACUNA GI l m O k . es E Allat Do O EARHART o i p e Margit N OTAU nt M T rsa CORONA a t a D E o I R Melia CORONA n o r o s M M .Wanda S H TA D a L O CORONA a n g I S Akn Mons o B . t Y a x r Mokosha N Rita e w U E M e A AUDRA D s R V s E S R l S VENUS FAKAHOTU a Mons L E E A l ES o GI K A T NIGHTINGALE I S N P O HM Cleopatra M RTUN A VÉNUSZ VENERA CORONA r V I L P FO PLANITIA ÂÅÍÅÐÀ s A o CORONA M e LA N P N n K a IT MOIRA s UM . a Hemera Dorsa A Iris DorsaBarsova 11 km a E IA TESSERA t t m A e a VENUŠE WENUS Hiei Chu n R a r A R E s T S DEMETER i A d ES D L A o Patera A r IS T N o R s r TA VIRIL CORONA s P s u e a L A N I T I A P p nt A o A L t e o N s BEIWE s M A ir u K A D G U Dan Baba-Jaga 1 : 45 000 000 E a CORONA D T N o M e or E ASPASIA t sa MM= KM S r . -

FROM DARKNESS to LIGHT WRITERS in MUSEUMS 1798-1898 Edited by Rosella Mamoli Zorzi and Katherine Manthorne
Mamoli Zorzi and Manthorne (eds.) FROM DARKNESS TO LIGHT WRITERS IN MUSEUMS 1798-1898 Edited by Rosella Mamoli Zorzi and Katherine Manthorne From Darkness to Light explores from a variety of angles the subject of museum ligh� ng in exhibi� on spaces in America, Japan, and Western Europe throughout the nineteenth and twen� eth centuries. Wri� en by an array of interna� onal experts, these collected essays gather perspec� ves from a diverse range of cultural sensibili� es. From sensi� ve discussions of Tintore� o’s unique approach to the play of light and darkness as exhibited in the Scuola Grande di San Rocco in Venice, to the development of museum ligh� ng as part of Japanese ar� s� c self-fashioning, via the story of an epic American pain� ng on tour, museum illumina� on in the work of Henry James, and ligh� ng altera� ons at Chatsworth, this book is a treasure trove of illumina� ng contribu� ons. FROM DARKNESS TO LIGHT FROM DARKNESS TO LIGHT The collec� on is at once a refreshing insight for the enthusias� c museum-goer, who is brought to an awareness of the exhibit in its immediate environment, and a wide-ranging scholarly compendium for the professional who seeks to WRITERS IN MUSEUMS 1798-1898 proceed in their academic or curatorial work with a more enlightened sense of the lighted space. As with all Open Book publica� ons, this en� re book is available to read for free on the publisher’s website. Printed and digital edi� ons, together with supplementary digital material, can also be found at www.openbookpublishers.com Cover image: -

AIAA SPACE Forum
17–19 SEPTEMBER 2018 ORLANDO, FLORIDA space.aiaa.org #aiaaSpace› THE SKY IS NOT THE LIMIT. AT LOCKHEED MARTIN, WE’RE ENGINEERING A BETTER TOMORROW. The Orion spacecraft will carry astronauts on bold missions to the moon, Mars and beyond — missions that will excite the imagination and advance the frontiers of science. Because at Lockheed Martin, we’re designing ships to go as far as the spirit of exploration takes us. Learn more at lockheedmartin.com/orion. © 2018 LOCKHEED MARTIN CORPORATION NETWORK NAME: AIAA ON-SITE Wi-Fi › PASSWORD: 2018SPACE CONTENTS Organizing Committee ..................................................................................................4 Welcome ........................................................................................................................... 5 Sponsors and Supporters .............................................................................................6 Forum Overview .............................................................................................................. 8 Pre-Forum Activities .................................................................................................... 10 Plenary & Forum 360 Sessions ...................................................................................12 Rising Leaders in Aerospace .......................................................................................15 Special Programming .................................................................................................. 16 Complex Aerospace Systems -

The Sexual Tensions of William Sharp: a Study of the Birth of Fiona Macleod, Incorporating Two Lost Works, “Ariadne in Naxos” and “Beatrice”
W&M ScholarWorks Arts & Sciences Books Arts and Sciences 1996 The Sexual Tensions of William Sharp: A Study of the Birth of Fiona Macleod, Incorporating Two Lost Works, “Ariadne in Naxos” and “Beatrice” Terry L. Meyers College of William and Mary, [email protected] Follow this and additional works at: https://scholarworks.wm.edu/asbook Part of the Literature in English, British Isles Commons Recommended Citation Meyers, Terry L.. "The Sexual Tensions of William Sharp: A Study of the Birth of Fiona Macleod, Incorporating Two Lost Works, “Ariadne in Naxos” and “Beatrice”" (1996). Peter Lang. https://scholarworks.wm.edu/asbook/9 This Book is brought to you for free and open access by the Arts and Sciences at W&M ScholarWorks. It has been accepted for inclusion in Arts & Sciences Books by an authorized administrator of W&M ScholarWorks. For more information, please contact [email protected]. Introduction Printed here for the first time are two lost works by the nineteenth-century Scottish writer William Sharp (1855-1905), works that manifest the poetic and cultural impress of the Victorian age (especially its constrictions on gender and sexuality) and that illuminate Sharp's complex personality. The first work is "Ariadne in N axos," a moving and dark play of love and abandonment stimu lated by Algernon Charles Swinburne's Greek tragedy Atalanta in Calydon (1865); the second is "Beatrice," a poem in the idyllic mode popularized by Alfred, Lord Tennyson. William Sharp and the Victorian Pressures on Sexuality When he died, William Sharp was respected as journal ist, writer, and poet. -

Yale University Art Gallery Bulletin 2011 Online Supplement
Yale University Art Gallery Bulletin 2011 online supplement 1 african art Within these lists, objects in the depart- media in order of prevalence. Dimen- Acquisitions ments of American Paintings and Sculp- sions are given in inches followed by July 1, 2010– ture, American Decorative Arts, Asian centimeters in parentheses; height pre- Art, European Art, Modern and Con- cedes width. For three-dimensional June 30, 2011 temporary Art, and Prints, Drawings, sculpture and most decorative objects, and Photographs are alphabetized by such as furniture, height precedes width artist, then ordered by date, then alpha- precedes depth. For drawings, dimen- betized by title, then ordered by acces- sions are of the sheet; for relief and inta- sion number. Objects in the departments glio prints, the matrix; for planographic of African Art, Ancient Art, Art of the prints, the sheet; and for photographs, Ancient Americas, Coins and Medals, the image, unless otherwise noted. For and Indo-Pacific Art are ordered chrono- medals, weight is given in grams, axis in logically, then alphabetized by title, then clock hours, and diameter in millimeters. ordered by accession number. If an object is shaped irregularly, maxi- Circa (ca.) is used to denote that mum measurements are given. a work was executed sometime around Illustrated works are titled in bold. the date given. For all objects, principal medium is given first, followed by other 2 African Art Head Katsina Nigeria, 200 b.c.e.–100 c.e. Terracotta, 7 ½ x 5 ¼ x 5 ¾ in. (19.1 x 13.3 x 14.6 cm) Gift of Charles D. Miller III, b.a. -

Tangible Religion. Materiality of Domestic Cult Practices from Antiquity to Early Modern
ACTA INSTITUTI ROMANI FINLANDIAE VOL. 49 TANGIBLE RELIGION MATERIALITY OF DOMESTIC CULT PRACTICES FROM ANTIQUITY TO EARLY MODERN ERA TANGIBLE RELIGION TANGIBLE editors RIA BERG, ANTONELLA CORALINI, ANU KAISA KOPONEN & REIMA VÄLIMÄKI ROMA 2021 TANGIBLE RELIGION MATERIALITY OF DOMESTIC CULT PRACTICES FROM ANTIQUITY TO EARLY MODERN ERA editors RIA BERG, ANTONELLA CORALINI, ANU KAISA KOPONEN & REIMA VÄLIMÄKI ACTA INSTITUTI ROMANI FINLANDIAE Vol. 49 TANGIBLE RELIGION MATERIALITY OF DOMESTIC CULT PRACTICES FROM ANTIQUITY TO EARLY MODERN ERA editors RIA BERG, ANTONELLA CORALINI, ANU KAISA KOPONEN & REIMA VÄLIMÄKI ROMA 2021 Acta Instituti Romani Finlandiae, rivista internazionale open-access sottoposta a peer review Acta Instituti Romani Finlandiae, an international peer-reviewed open-access series Direttore / Director MIKA KAJAVA, Helsinki Department of Languages FI–00014 University of Helsinki Comitato scientifico /Editorial board MIKA KAJAVA – MARJO KAARTINEN – ARJA KARIVIERI Comitato editoriale internazionale / International editorial advisory board JOHN BODEL (Providence, USA), ALFREDO BUONOPANE (Verona), IRENE BRAGANTINI (Napoli), MICHEL GRAS (Paris), KLAUS HERBERS (Erlangen), SYBILLE EBERT-SCHIFFERER (Roma) Redazione / Editing Simo ÖRMÄ, Roma Redazione del vol. 49 / Editorial work for vol. 49 RIA BERG, ANTONELLA CORALINI, ANU KAISA KOPONEN & REIMA VÄLIMÄKI In copertina / Cover illustration Bronze statuette of the goddess Fortuna and the Lares in the lararium of the House of Fortuna (IX 7, 20), Pompeii. After F. Niccolini – F. Niccolini, Le case ed i monumenti di Pompei disegnati e descritti, Napoli 1890, vol. III, Casa r. IX is. VII, tav. III. È vietata la riproduzione delle immagini del libro in qualsiasi forma / Reproduction of the images of the volume is forbidden I titoli delle riviste sono abbreviati secondo le norme dell’American Journal of Archaeology / The abbreviations for journal titles follow the system of the American Journal of Archaeology.