Software Interface Specification Junocam Standard Data Products
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lessons Learned from the Juno Project
Lessons Learned from the Juno Project Presented by: William McAlpine Insoo Jun EJSM Instrument Workshop January 18‐20, 2010 © 2010 All rights reserved. Pre‐decisional, For Planning and Discussion Purposes Only Y‐1 Topics Covered • Radiation environment • Radiation control program • Radiation control program lessons learned Pre‐decisional, For Planning and Discussion Purposes Only Y‐2 Juno Radiation Environments Pre‐decisional, For Planning and Discussion Purposes Only Y‐3 Radiation Environment Comparison • Juno TID environment is about a factor of 5 less than JEO • Juno peak flux rate is about a factor of 3 above JEO Pre‐decisional, For Planning and Discussion Purposes Only Y‐4 Approach for Mitigating Radiation (1) • Assign a radiation control manager to act as a focal point for radiation related activities and issues across the Project early in the lifecycle – Requirements, EEE parts, materials, environments, and verification • Establish a radiation advisory board to address challenging radiation control issues • Hold external reviews for challenging radiation control issues • Establish a radiation control process that defines environments, defines requirements, and radiation requirements verification documentation • Design the mission trajectory to minimize the radiation exposure Pre‐decisional, For Planning and Discussion Purposes Only Y‐5 Approach for Mitigating Radiation (2) • Optimize shielding design to accommodate cumulative total ionizing dose and displacement damage dose and instantaneous charged particle fluxes near Perijove -

Juno Spacecraft Description
Juno Spacecraft Description By Bill Kurth 2012-06-01 Juno Spacecraft (ID=JNO) Description The majority of the text in this file was extracted from the Juno Mission Plan Document, S. Stephens, 29 March 2012. [JPL D-35556] Overview For most Juno experiments, data were collected by instruments on the spacecraft then relayed via the orbiter telemetry system to stations of the NASA Deep Space Network (DSN). Radio Science required the DSN for its data acquisition on the ground. The following sections provide an overview, first of the orbiter, then the science instruments, and finally the DSN ground system. Juno launched on 5 August 2011. The spacecraft uses a deltaV-EGA trajectory consisting of a two-part deep space maneuver on 30 August and 14 September 2012 followed by an Earth gravity assist on 9 October 2013 at an altitude of 559 km. Jupiter arrival is on 5 July 2016 using two 53.5-day capture orbits prior to commencing operations for a 1.3-(Earth) year-long prime mission comprising 32 high inclination, high eccentricity orbits of Jupiter. The orbit is polar (90 degree inclination) with a periapsis altitude of 4200-8000 km and a semi-major axis of 23.4 RJ (Jovian radius) giving an orbital period of 13.965 days. The primary science is acquired for approximately 6 hours centered on each periapsis although fields and particles data are acquired at low rates for the remaining apoapsis portion of each orbit. Juno is a spin-stabilized spacecraft equipped for 8 diverse science investigations plus a camera included for education and public outreach. -
Juno Magnetometer (MAG) Standard Product Data Record and Archive Volume Software Interface Specification
Juno Magnetometer Juno Magnetometer (MAG) Standard Product Data Record and Archive Volume Software Interface Specification Preliminary March 6, 2018 Prepared by: Jack Connerney and Patricia Lawton Juno Magnetometer MAG Standard Product Data Record and Archive Volume Software Interface Specification Preliminary March 6, 2018 Approved: John E. P. Connerney Date MAG Principal Investigator Raymond J. Walker Date PDS PPI Node Manager Concurrence: Patricia J. Lawton Date MAG Ground Data System Staff 2 Table of Contents 1 Introduction ............................................................................................................................. 1 1.1 Distribution list ................................................................................................................... 1 1.2 Document change log ......................................................................................................... 2 1.3 TBD items ........................................................................................................................... 3 1.4 Abbreviations ...................................................................................................................... 4 1.5 Glossary .............................................................................................................................. 6 1.6 Juno Mission Overview ...................................................................................................... 7 1.7 Software Interface Specification Content Overview ......................................................... -

EPSC2017-151-1, 2017 European Planetary Science Congress 2017 Eeuropeapn Planetarsy Science Ccongress C Author(S) 2017
EPSC Abstracts Vol. 11, EPSC2017-151-1, 2017 European Planetary Science Congress 2017 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2017 Properties and circulation of Jupiter's circumpolar cyclones as measured by JunoCam G. S. Orton (1), G. Eichstädt (2), J. H. Rogers (3), C. J. Hansen (4), M. Caplinger (5), T. Momary (1), F. Tabataba-Vakili (1), A. P. Ingersoll (6) (1) Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California USA ([email protected]), (2) Independent scholar, Stuttgart, Germany. (3) British Astronomical Association, London, UK, (4) Planetary Science Institute, Tucson, Arizona, USA, (5) Malin Space Science Systems, San Diego, California, USA, (6) California Institute of Technology, Pasadena, California, USA. Abstract 2. Data JunoCam has taken the first high-resolution visible JunoCam is rigidly mounted on the spinning images of Jupiter’s poles, which show that each pole spacecraft. That way, it can take a full panorama has a cluster of circumpolar cyclones (CPCs), each within about 30 seconds consisting of up to 82 narrow one separated in longitude by roughly equal spacing exposures. Usually, it takes partial panoramas of the [1]. There are five at the south pole and eight at the target of interest. The camera has a horizontal field of north pole. These configurations, including their view of about 58°, and Kodak KAI-2020 CCD sensor asymmetries and the characteristics of individual with four filter stripes, a red, a green, a blue and a cyclones, have remained stable over 7 months from narrow-band 890-nm infrared filter attached on the perijove 1 to perijove 5 as of this writing. -

Modeling the Stability of Polygonal Patterns of Vortices at the Poles of Jupiter As Revealed by the Juno Spacecraft
Modeling the stability of polygonal patterns of vortices at the poles of Jupiter as revealed by the Juno spacecraft Cheng Lia,1, Andrew P. Ingersollb, Alexandra P. Klipfelb, and Harriet Brettleb aAstronomy Department, University of California, Berkeley, CA 94720; and bDivision of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125 Edited by Neta A. Bahcall, Princeton University, Princeton, NJ, and approved August 3, 2020 (received for review April 30, 2020) From its pole-to-pole orbit, the Juno spacecraft discovered arrays falls off faster than the 1/r dependence of a vortex patch sur- of cyclonic vortices in polygonal patterns around the poles of Ju- rounded by a region with zero vorticity—suggesting anticyclonic piter. In the north, there are eight vortices around a central vortex, vorticity surrounding the cyclones. In other words, the cyclonic and in the south there are five. The patterns and the individual vortices are “shielded.” Shielding may explain the slow rotation vortices that define them have been stable since August 2016. The (1.5° westward) of the structure as a whole during the 53 d of one azimuthal velocity profile vs. radius has been measured, but ver- orbit (5). tical structure is unknown. Here, we ask, what repulsive mechanism On Earth, cyclones drift poleward (6, 7), but they dissipate prevents the vortices from merging, given that cyclones drift pole- over land and cold ocean. Jupiter has neither land nor ocean, so ward in atmospheres of rotating planets like Earth? What atmo- the question is, why do cyclones neither accumulate at the poles spheric properties distinguish Jupiter from Saturn, which has only nor merge? Saturn has only one cyclone, and it is surrounded by one cyclone at each pole? We model the vortices using the shallow a sea of smaller anticyclones (8). -

Juno Mission to Jupiter
National Aeronautics and Space Administration Juno Mission to Jupiter unknown how deeply rooted Jupiter’s colorful, banded clouds and planet-sized spots are. And scientists yearn to understand what powers the auroras — Jupiter’s northern and southern lights. These mysteries make it clear that although Jupiter’s colorful clouds get most of the attention, some of the most enticing mysteries are hiding deep inside the planet. A Five-Year Journey Juno’s trip to Jupiter will take about five years. Though the journey may seem long, this flight plan allows the mission to use Earth’s gravity to speed the craft on its way. The spacecraft first loops around the inner solar system and then swings past Earth two years after launch to get a boost that will propel it onward to its With the exception of the sun, Jupiter is the most destination. dominant object in the solar system. Because of its enormous size and the fact that it was likely the first In July 2016, Juno will fire its main engine and slip of the planets to form, it has profoundly influenced the into orbit around the giant planet to begin its scientific formation and evolution of the other bodies that orbit mission. our star. NASA’s Juno mission will allow us to examine this gas giant planet from its innermost core to the outer A Solar-Powered, Spinning Spacecraft reaches of its enormous magnetic force field. Jupiter’s orbit is five times farther from the sun than Earth’s location, so the giant planet receives about During its mission, Juno will map Jupiter’s gravity 25 times less sunlight than Earth. -
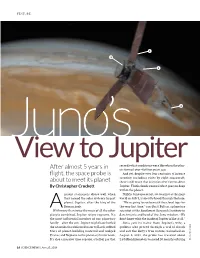
After Almost 5 Years in Flight, the Space Probe Is
FEATURE 1 3 2 Juno’s 4 View to Jupiter records what conditions were like when the plan- After almost 5 years in ets formed over 4 billion years ago. flight, the space probe is And yet, despite over four centuries of intense scrutiny, including visits by eight spacecraft, about to meet its planet there’s still much that scientists don’t know about By Christopher Crockett Jupiter. Thick clouds conceal what goes on deep within the planet. ncient stargazers chose well when NASA’s Juno spacecraft, set to arrive at the giant they named the solar system’s largest world on July 4, is about to break through the haze. planet, Jupiter, after the king of the “We’re going to see beneath the cloud tops for A Roman gods. the very first time,” says Scott Bolton, a planetary With more than twice the mass of all the other scientist at the Southwest Research Institute in planets combined, Jupiter reigns supreme. It’s San Antonio and head of the Juno mission. “We the most influential member of our planetary don’t know what the inside of Jupiter is like at all.” family — after the sun. Jupiter might have hurled Juno gets its name from Jupiter’s wife, a the asteroids that delivered water to Earth, robbed goddess who peered through a veil of clouds Mars of planet-building material and nudged and saw the deity’s true nature. Launched on Uranus and Neptune to the planetary hinterlands. August 5, 2011, the probe has traveled about It’s also a massive time capsule, a ball of gas that 2.8 billion kilometers to spend 20 months orbiting JPL-CALTECH/NASA 16 SCIENCE NEWS | June 25, 2016 Jupiter’s 67 moons rather than the planet itself. -

A Look Inside the Juno Mission to Jupiter12 Richard S
A Look Inside the Juno Mission to Jupiter12 Richard S. Grammier Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Drive, M/S 301-320 Pasadena, CA 91109 818-354-0596 [email protected] Abstract—Juno, the second mission within the New deep-space maneuvers approximately one year after launch, Frontiers Program, is a Jupiter polar orbiter mission perform an Earth-gravity assist approximately 26 months designed to return high-priority science data that spans after launch, and achieve Jupiter orbit insertion in 2016 after across multiple divisions within NASA’s Science Mission a five-year journey. Juno will investigate the gas giant for Directorate. Juno’s science objectives, coupled with the one year, operating a suite of eight instruments to meet its natural constraints of a cost-capped, PI-led mission and the scientific objectives. After completing one year of orbital harsh environment of Jupiter, have led to a very unique science, the spacecraft will de-orbit into Jupiter for the mission and spacecraft design. purpose of planetary protection. The mission and spacecraft design accommodates the required payload suite of instruments in a way that maximizes science data collection and return, maintains a simplified orbital operations approach, and meets the many challenges associated with operating a spin-stabilized, solar- powered spacecraft in Jupiter’s high radiation and magnetic environment. The project’s efforts during the preliminary design phase have resulted in an integrated design and operations approach that meets all science objectives, retains significant technical, schedule and cost margins, and has retired key risks and challenges. -

Juno's Magnetometer Investigation: Early Results
EPSC Abstracts Vol. 11, EPSC2017-741, 2017 European Planetary Science Congress 2017 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2017 Juno’s Magnetometer Investigation: Early Results J. E. P. Connerney (1,2), R. J. Oliversen (2), J. R. Espley (2), D. J. Gershman (2,3), J. R. Gruesbeck (2,3), S. Kotsiaros (2,4), G. A. DiBraccio (1,4), J. L. Joergensen (5), P. S. Joergensen (5), J. M. G. Merayo (5), T. Denver (5), M. Benn (5), J. B. Bjarno (5), A. Malinnikova (5), J. Bloxham (6), K. M. Moore (6), S. J. Bolton (7), S. M. Levin (8) (1) Space Research Corporation, Annapolis, MD, USA, (2) NASA Goddard Space Flight Center, Greenbelt, MD, USA, (3) University of Maryland, College Park, MD, USA, (4) Universities Space Research Association, Columbia, MD, USA, (5) Technical University of Denmark (DTU), Lyngby, Denmark, (6) Harvard University, Cambridge, MA, USA, (7) Southwest Research Institute, San Antonio, TX, USA, (8) Jet Propulsion Laboratory, Pasadena, CA, USA, ([email protected]) Abstract Repeated periapsis passes will eventually wrap the planet with observations equally spaced in longitude After nearly 5 years in space, the Juno spacecraft (<12° at the equator), optimized for characterization entered polar orbit about Jupiter on July 5 (UTC), of the Jovian dynamo. Such close passages are 2016, in search of clues to the planet’s formation and sensitive to small spatial scale variations in the evolution. Juno probes the deep interior with magnetic field and a large number of such passes is measurements of Jupiter’s magnetic and gravitational required to bring the magnetic field into focus. -

Junocam and the Role of Amateurs
JunoCam and the Role of Amateur Astronomers Glenn Orton Jet Propulsion Laboratory California Institute of Technology ROADMAP • The supporting role of Earth-based observations • JunoCam’s mission plans • Logistics for supporting JunoCam –Uploading –Discussion –Voting! –Assembling your own JunoCam images key remote-sensing instruments: Microwave Radiometer— MWR (JPL) UV Spectrometer— UVS (SwRI) Infrared Camera— JIRAM (ASI) Visible Camera— JunoCam (Malin) JunoCam Observing Plans • Approch • Capture orbits • Movies • Prime Mission Approach result: JunoCam’s first image of Jupiter! Jupiter was observed in every image acquired by JunoCam in jc059 This image acquired on 2016 Jan 26, ~57 million miles away, at 3x magnification JunoCam Ops meeting 5 Perijove 1 (PJ1) Goals Test everything we can! • Polar images at lowest emission angle and closest range • Teste different compression ratios • Try out mid-latitude stereo pairs • Image an entire rotation at 3 angles (from ring plane) to see if we can detect the rings • Image Ganymede at 8/26 2100 at 473k km Pre-Prime Mission PJ2 and PJ3 • PJ2 has PRM, so no JunoCam images, at least not at perijove • PJ3 has clean-up OTM with larger than normal uncertainties, so no public voting (but we will release the images for processing by the public) -> opportunity to repeat PJ1 tests • “One-orbit” movie from PJ2+2days to PJ3 Movies • Approach Movie – JOI-22 days to JOI-5 days – Low resolution on Jupiter, mostly just satellite movement • Marble Movie – Some features distinguishable on Jupiter, but not much – JOI -

The Young Astronomers Newsletter
September, 2016 Volume 24, Number 9 Forsyth Astronomical Society THE YOUNG ASTRONOMERS NEWSLETTER JunoCam will survive only to the eighth orbit, and the microwave radiometer should make it through the 11th orbit. On board the spacecraft are nine instruments which have various goals, for example, measuring the planet’s magnetic field and gravitational flux, as well as measuring the content of gases, especially water and ammonia in the gaseous atmosphere. We are looking forward to what revelations Juno will provide for us in the next 20 months, or so. The mission should come to an end when the probe dives into the planet in early 2018. [Astronomy magazine, August, 2016]. JUNO AT JUPITER (NASA illustration) NAMES PROPOSED FOR NEW ELEMENTS THE JUNO PROBE FACES JUPITER’S POWERFUL The super heavy elements with atomic MAGNETIC FIELD numbers: 113, 115, 117 and 118 were recently On July 4, 2016, NASA’s probe, Juno, reached created/isolated in laboratories in the U.S., the gas giant planet Jupiter. At that point the Japan and Russia. The International Union of spacecraft carefully reduced its speed so that it Pure and Applied Chemistry (IUPAC) has a could initiate its polar orbiting sequence. stepwise process for arriving at the name and The orbit will be given a final adjustment in symbol for newly created/isolated elements. October to produce an elongated path; The discoverers may propose names, and after stretching from its most distant point of 1.2 they are discussed and agreed on by an IUPAC million miles from the planet, to within 3,100 committee, they are submitted for public miles of the planet’s cloud tops. -

Juno Mission to Jupiter
National Aeronautics and Space Administration Juno Mission to Jupiter unknown how deeply rooted Jupiter’s colorful, banded clouds and planet-sized spots are. And scientists yearn to understand what powers the auroras — Jupiter’s northern and southern lights. These mysteries make it clear that although Jupiter’s colorful clouds get most of the attention, some of the most enticing mysteries are hiding deep inside the planet. A Five-Year Journey Juno’s trip to Jupiter will take a total of about five years. Though the journey may seem long, this flight plan al- lows the mission to use Earth’s gravity to speed the craft on its way. The spacecraft first looped around the inner solar system, and then, two years after launch in 2013, it swung past Earth to get a boost to propel it onward to With the exception of the sun, Jupiter is the most its destination. dominant object in the solar system. Because of its enormous size and the fact that it was likely the first In July 2016, Juno will fire its main engine and slip of the planets to form, it has profoundly influenced the into orbit around the giant planet to begin its scientific formation and evolution of the other bodies that orbit mission. our star. NASA’s Juno mission will allow us to examine this gas giant planet from its innermost core to the outer A Solar-Powered, Spinning Spacecraft reaches of its enormous magnetic force field. Jupiter’s orbit is five times farther from the sun than Earth’s location, so the giant planet receives about During its mission, Juno will map Jupiter’s gravity 25 times less sunlight than Earth.