Beam Diagnostics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
20.5 Ion Detectors
20.5 Ion Detectors • the Faraday cup neutralizes ions to provide a high-precision measurement • the electron multiplier generates a pulse of current for each ion • the photon multiplier uses conversion dynodes to monitor both positive and negative ions • the two multipliers are capable of fast measurements, thus compatible with TOF or Fourier transform methods 20.5 : 1/4 Faraday Cup slit Ions exiting the analyzer are slowed by Faraday cup a positive potential and impact the ion + grounded electrode. At the electrode beam + they are __________ by electrons that RL travel through the load resistor. This ion suppressor causes a voltage across the load resistor that is measured by a high input impedance voltmeter. The impacted electrode is at an angle so that any secondary ions that are created are _____________ by the grounded wall. Of all ion detectors, the Faraday cup provides the most precise relationship between the number of ions exiting the analyzer and the electrical measurement. It is used in __________ experiments such as isotope dilution. Because very small currents are measured, the Faraday cup cannot be used for experiments involving rapid scanning. 20.5 : 2/4 Electron Multiplier ion beam An electron multiplier is constructed just like a photomultiplier but without 16e- 4e- 3 - a _______________. It has dynodes 10 e RL constructed from a Cu/Be alloy, which dynodes is a good secondary electron emitter. +V The dynode potentials are such that the first is grounded and each subsequent one is 100 V more positive. This makes the voltage measurement a little tricky because one end of the load resistor is connected to positive _____________. -

Modern Mass Spectrometry
Modern Mass Spectrometry MacMillan Group Meeting 2005 Sandra Lee Key References: E. Uggerud, S. Petrie, D. K. Bohme, F. Turecek, D. Schröder, H. Schwarz, D. Plattner, T. Wyttenbach, M. T. Bowers, P. B. Armentrout, S. A. Truger, T. Junker, G. Suizdak, Mark Brönstrup. Topics in Current Chemistry: Modern Mass Spectroscopy, pp. 1-302, 225. Springer-Verlag, Berlin, 2003. Current Topics in Organic Chemistry 2003, 15, 1503-1624 1 The Basics of Mass Spectroscopy ! Purpose Mass spectrometers use the difference in mass-to-charge ratio (m/z) of ionized atoms or molecules to separate them. Therefore, mass spectroscopy allows quantitation of atoms or molecules and provides structural information by the identification of distinctive fragmentation patterns. The general operation of a mass spectrometer is: "1. " create gas-phase ions "2. " separate the ions in space or time based on their mass-to-charge ratio "3. " measure the quantity of ions of each mass-to-charge ratio Ionization sources ! Instrumentation Chemical Ionisation (CI) Atmospheric Pressure CI!(APCI) Electron Impact!(EI) Electrospray Ionization!(ESI) SORTING DETECTION IONIZATION OF IONS OF IONS Fast Atom Bombardment (FAB) Field Desorption/Field Ionisation (FD/FI) Matrix Assisted Laser Desorption gaseous mass ion Ionisation!(MALDI) ion source analyzer transducer Thermospray Ionisation (TI) Analyzers quadrupoles vacuum signal Time-of-Flight (TOF) pump processor magnetic sectors 10-5– 10-8 torr Fourier transform and quadrupole ion traps inlet Detectors mass electron multiplier spectrum Faraday cup Ionization Sources: Classical Methods ! Electron Impact Ionization A beam of electrons passes through a gas-phase sample and collides with neutral analyte molcules (M) to produce a positively charged ion or a fragment ion. -

Analytical Chemistry, Strategic Exercise: Organic Aerosol Analysis
WIR SCHAFFEN WISSEN –HEUTE FÜR MORGEN Analytical Chemistry, Strategic exercise: Organic aerosol analysis Urs Baltensperger Laboratory of Atmospheric Chemistry, Paul Scherrer Institute, Villigen , Switzerland ETHZ, HS 2020, 8.12.2020 Aerosol size distribution, and sources and sinks Chemical composition of PM1 in Zurich in winter Energiespiegel 19/2008 http://gabe.web.psi.ch/pdfs/Energiespiegel_19_e.pdf Today’s task: Organic aerosol analysis Page 4 The state of the art in 2009 Hallquist et al., ACP 2009 Traditional methods can identify only a fraction of organics Rogge et al., 1993 Most detailed analysis performed with off-line methods: More than 10‘000 different organic compounds isolated with GCxGC-TOF/MS Hamilton et al., 2004 NB: isolated ≠ identified…. Besides extraction, also thermal desorption is applied: TAG (Goldstein et al., 2008) Organic acids formed in the photooxidation of -pinene All acids found in aerosol phase. Some of them are highly volatile (e.g., formic, acetic acid) and not expected to be there. Probably hydrolysis of oligomers Fisseha et al., Anal. Chem. 2004 Developments since 2009 EESI CHARON‐ PTRMS FIGAERO -I-CIMS Adapted from Hallquist et al., 2009 9 Required for mass spectrometry: ionization of individual molecules • For gas phase: relatively easy (avoid fragmentation, clustering) • For aerosol particles: Much more difficult: either dissolution in a solvent or evaporation - Problem with dissolution: only the soluble fraction accessible - Problem with evaporation: fragmentation Page 10 What is Mass Spectrometry -

QMG 422 Analyzers
Operating Instructions Incl. Declaration of Conformity QMG 422 Analyzers BG 805 983 BE (0112) 1 Product Identification In all communications with Pfeiffer Vacuum, please specify the information on the product nameplate. For convenient reference copy that information into the space provided below. Pfeiffer Vacuum, D-35614 Asslar Typ: No: F-No: Validity This document applies to the QMA 400, QMA 410, QMA 430 with Faraday cup or 90° off-axis SEM and Faraday cup and with the ion sources described in this document. Illustrations If not indicated otherwise in the legends, the illustrations in this document corre- spond to the QMA 400 with 90° off-axis SEM. They apply to other types by analogy. Designations The short designation "QMA" is used for the QMA 400, QMA 410 and QMA 430. The short designation "QMH" is used for the QMH 400 and QMH 410. In contrast to the operating instructions for the QMG 422, these instructions follow the same conventions as the Pfeiffer QuadStar™ 422 operating instructions. The parameters are marked with quotation marks ("…") e.g. "Resolution". Technical changes We reserve the right to make technical changes without prior notice. Intended Use The QMA 400, QMA 410 and QMA 430 Analyzers are used for gas analysis in high vacuum. They are part of the QMG 422 mass spectrometer system and may only be used in connection with equipment belonging to that system. The operating instructions of all system components must be strictly followed. 2 BG 805 983 BE (0112) QMA4x0.oi Contents Product Identification 2 Validity 2 Intended -
Electron Microscopy Are the Beam Damaging Effects That Can Arise from Interactions Between the Primary High Energy Electron Beam and the Sample
Thermal in situ TEM experiment on nanoscale indium islands Estimation of Electron Beam Heating Effect Master’s thesis in Applied Physics REN QIU Department of Physics CHALMERS UNIVERSITY OF TECHNOLOGY Gothenburg, Sweden 2017 Master’s thesis 2017 Thermal in situ TEM experiment on nanoscale indium islands Estimation of Electron Beam Heating Effect REN QIU Department of Physics Eva Olsson Group Chalmers University of Technology Gothenburg, Sweden 2017 Thermal in situ TEM Experiment on Nanoscale Indium Islands Estimation of Electron Beam Heating Effect Master Thesis within the Masters Programme of Applied Physics © REN QIU, 2017. Supervisor: Eva Olsson, Norvik Voskanian, Lunjie Zeng, Department of Physics Examiner: Eva Olsson, Department of Physics Master’s Thesis 2017 Department of Physics Eva Olsson Group Chalmers University of Technology SE-412 96 Gothenburg Telephone + 46(0)73-732 4883 Cover: Top left: Indium islands segmentation by watershed algorithm based on the bright field TEM image. Top right: Dark field image of the in situ melting experiment where the indium islands with bright pixels are melted and the ones with dark pixels are in solid state. Bottom left: Nano-scale gold tip fabricated through electrochemical etching. Bottom right: A simple Faraday cup made on the gold tip by focus ion beam (FIB) method. Printed by Chalmers Reproservice Gothenburg, Sweden 2017 iv Thermal in situ TEM Experiment on Nanoscale Indium Islands Estimation of Electron Beam Heating Effect REN QIU Department of Physics Chalmers University of Technology Abstract One of the limitations of transmission electron microscopy are the beam damaging effects that can arise from interactions between the primary high energy electron beam and the sample. -

Mass Spectrometer Hardware for Analyzing Stable Isotope Ratios
Handbook of Stable Isotope Analytical Techniques, Volume-I P.A. de Groot (Editor) © 2004 Elsevier B.V. All rights reserved. CHAPTER 38 Mass Spectrometer Hardware for Analyzing Stable Isotope Ratios Willi A. Brand Max-Planck-Institute for Biogeochemistry, PO Box 100164, 07701 Jena, Germany e-mail: [email protected] Abstract Mass spectrometers and sample preparation techniques for stable isotope ratio measurements, originally developed and used by a small group of scientists, are now used in a wide range of fields. Instruments today are typically acquired from a manu- facturer rather than being custom built in the laboratory, as was once the case. In order to consistently generate measurements of high precision and reliability, an extensive knowledge of instrumental effects and their underlying causes is required. This con- tribution attempts to fill in the gaps that often characterize the instrumental knowl- edge of relative newcomers to the field. 38.1 Introduction Since the invention of mass spectrometry in 1910 by J.J. Thomson in the Cavendish laboratories in Cambridge(‘parabola spectrograph’; Thompson, 1910), this technique has provided a wealth of information about the microscopic world of atoms, mole- cules and ions. One of the first discoveries was the existence of stable isotopes, which were first seen in 1912 in neon (masses 20 and 22, with respective abundances of 91% and 9%; Thomson, 1913). Following this early work, F.W. Aston in the same laboratory set up a new instrument for which he coined the term ‘mass spectrograph’ which he used for checking almost all of the elements for the existence of isotopes. -

Probe Current Determination in Analytical TEM/STEM and Its Application to the Characterization of Large Area EDS Detectors
University of Wollongong Research Online Australian Institute for Innovative Materials - Papers Australian Institute for Innovative Materials 2015 Probe current determination in analytical TEM/ STEM and its application to the characterization of large area EDS detectors David R. G Mitchell University of Wollongong, [email protected] MItchell John Bromley Nancarrow University of Wollongong, [email protected] Publication Details Mitchell, D. R. G. & Nancarrow, M. J. B. (2015). Probe current determination in analytical TEM/STEM and its application to the characterization of large area EDS detectors. Microscopy Research and Technique, 78 (10), 886-893. Research Online is the open access institutional repository for the University of Wollongong. For further information contact the UOW Library: [email protected] Probe current determination in analytical TEM/STEM and its application to the characterization of large area EDS detectors Abstract A simple procedure, which enables accurate measurement of transmission electron microscopy (TEM)/STEM probe currents using an energy loss spectrometer drift tube is described. The currents obtained are compared with those measured on the fluorescent screen to enable the losses due to secondary and backscattered electrons to be determined. The current values obtained from the drift tube allow the correction of fluorescent screen current densities to yield true current. They also enable CCD conversion efficiencies to be obtained, which in turn allows images to be calibrated in terms of electron fluence. Using probes of known current in conjunction with a NiO reference specimen enables the X-ray detector solid angle to be determined. The iON specimen also allows a wide range of other EDS detector parameters to be obtained, including the presence of ice and carbon contamination. -

Monte Carlo Simulation and Analysis of the Faraday Cup/Beam Dump At
Monte Carlo simulation and analysis of the Faraday cup/beam dump at the Accelerator Test Facility II Hannah Seymour Department of Physics and Astronomy, Barnard College of Columbia University, New York, NY, 10027 Kin Yip Collider-Accelerator Department, Brookhaven National Laboratory, Upton, NY, 11973 Abstract The Accelerator Test Facility II (ATF-II) is a planned upgrade of the Accelerator Test Facility, an electron accelerator facility designed to test properties of particle accelerators and advance accelerator technologies. The Accelerator Test Facility II will increase the beam energy to about 110 MeV and thus increase the size and efficiency of the facility. A Faraday cup is a conductive metal cup used for capturing charged particles in a vacuum, and is also used as a beam dump. The Faraday cups used for the Accelerator Test Facility II are aluminum with a vacuum cavity. When the electron beam hits the aluminum, a current is produced in the metal, from which the energy and charge deposition as well as electron flux of the beam can be measured. The Monte Carlo N-Particle Transport Code (MCNP6/X) is a FORTRAN-based software package used for simulating nuclear processes, such as neutron capture reactions or ionizations. Using MCNP6/X and measurements from AutoCAD drawings of the components, we have been able to model the Faraday cup and the surrounding facilities and simulate the bombardment of the cup with the upgraded beam to estimate the energy deposition on the cup as well as the neutron and photon radiation doses received at different points around the ATF-II and 3 estimate the production of tritium ( H) in the soil beneath the floor and ozone (O3) in the surrounding air. -

Development and First Experimental Tests of Faraday Cup Array
REVIEW OF SCIENTIFIC INSTRUMENTS 85, 013302 (2014) Development and first experimental tests of Faraday cup array J. Prokupek, ˚ 1,2,3,a) J. Kaufman,2 D. Margarone,1 M. Kr˚us,1,2,3 A. Velyhan,1 J. Krása,1 T. Burris-Mog,4 S. Busold,5 O. Deppert,5 T. E. Cowan,4,6 and G. Korn1 1Institute of Physics of the AS CR, v. v. i., ELI-Beamlines Project, Na Slovance 2, 182 21 Prague 8, Czech Republic 2Faculty of Nuclear Sciences and Physical Engineering, Czech Technical University in Prague, Bˇrehová 7, 115 19 Prague 1, Czech Republic 3Institute of Plasma Physics of the AS CR, v. v. i./PALS Centre, Za Slovankou 3, 182 00 Prague 8, Czech Republic 4Helmholtz-Zentrum Dresden-Rossendorf (HZDR), Bautzner Landstraße 400, D-01328 Dresden, Germany 5Technische Universität Darmstadt (TUD), Schlossgartenstraße 9, D-64289 Darmstadt, Germany 6Technische Universität Dresden, D-01069 Dresden, Germany (Received 29 October 2013; accepted 14 December 2013; published online 9 January 2014) A new type of Faraday cup, capable of detecting high energy charged particles produced in a high intensity laser-matter interaction environment, has recently been developed and demonstrated as a real-time detector based on the time-of-flight technique. An array of these Faraday cups was de- signed and constructed to cover different observation angles with respect to the target normal direc- tion. Thus, it allows reconstruction of the spatial distribution of ion current density in the subcritical plasma region and the ability to visualise its time evolution through time-of-flight measurements, which cannot be achieved with standard laser optical interferometry. -

Mass Spectrometry – Separation in Two Dimensions 1
3 MS Goals and Applications • Several variations on a theme, three common steps – Form gas-phase ions • choice of ionization method depends on sample identity and information required – Separate ions on basis of m/z • “Mass Analyzer” • analogous to monochromator, changing conditions of analyzer results in different ions being transmitted – Detect ions • want (need) high sensitivity – “Resolution” 4 MS Goals and Applications • All MS experiments are conducted under vacuum, why? – Mean free path (): RT 5cm 2 2d NAP mtorr • Ion Optics: Electric and magnetic fields induce ion motion – Electric fields most common: Apply voltage, ions move – Magnetic fields are common in mass analyzers. “Bend” ions paths (Remember the right hand rule?) 1 5 MS Figures of Merit: Resolving Power and Resolution • Relate to ability to distinguish between m/z – Defined at a particular m/z • Resolving Power, Resolution… – Variety of definitions – m at a given m m Resolving Power m m Resolution m 6 MS Components: Mass Analyzers • Magnetic Sector Mass Analyzers – Accelerate ions by applying voltage (V) – velocity depends on mass and charge (m/z) 1 KE zeV mv 2 2 – Electromagnet introduces a magnetic field (variable) – The path on an ion through the sector is driven by magnetic force and centripetal force • For an ion to pass through, These must be equal mv 2 m B2r2e F Bzev F M r c z 2V – For a given geometry (r), variation in B or V will allow different ions to pass – “Scanning” B or V generates a mass spectrum 2 7 MS Components: Mass Analyzers • In practice, ions leaving the source have a small spread of kinetic energies (bandwidth?) m R 2000 for mag. -
Single Stage Accelerator Mass Spectrometry
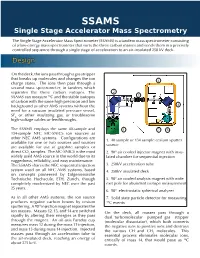
SSAMS Single Stage Accelerator Mass Spectrometry The Single Stage Accelerator Mass Spectrometer (SSAMS) is a tandem mass spectrometer consisting of a low-energy mass spectrometer that sorts the three carbon masses and sends them in a precisely controlled sequence through a single stage of acceleration to an air-insulated 250 kV deck. Design On the deck, the ions pass through a gas stripper that breaks up molecules and changes the ion 4 charge states. The ions then pass through a second mass spectrometer, in tandem, which separates the three carbon isotopes. The 2 SSAMS can measure 14C and the stable isotopes 3 of carbon with the same high precision and low background as other AMS systems without the 5 need for a vacuum insulated pressure vessel, SF6 or other insulating gas, or troublesome high-voltage cables or feedthroughs. The SSAMS employs the same 40-sample and 1 7 6 134-sample NEC MC-SNICS ion sources as other NEC AMS systems. Configurations are 1. 40 sample or 134 sample cesium sputter available for one or two sources and sources source are available for use of graphite samples or direct CO2 samples. The MC-SNICS is the most 2. 90° air cooled injector magnet with insu- widely used AMS source in the world due to its lated chamber for sequential injection ruggedness, reliability, and easy maintenance. The SSAMS shares the NEC sequential injection 3. 250kV acceleration tube system used on all NEC AMS systems, based 4. 250kV insulated deck on concepts pioneered by Eidgenossische Technische Hochscule, ETH, Zurich, though 5. 90° air cooled analysis magnet with wide completely modernized by NEC over the past exit pole for abundant isotope measurement 25 years. -

Mass Spectrometry: Forming Ions, to Identifying Proteins and Their Modifications
Mass spectrometry: forming ions, to identifying proteins and their modifications Stephen Barnes, PhD 4-7117 [email protected] S Barnes-UAB 1/20/06 Introduction to mass spectrometry • Class 1 - Biology and mass spectrometry – Why is mass spectrometry so important? – Short history of mass spectrometry – Ionization and measurement of ions • Class 2 - The mass spectrum – What is a mass spectrum? – Interpreting ESI and MALDI-TOF spectra – Combining peptide separation with mass spectrometry – MALDI mass fingerprinting – Tandem mass spectrometry and peptide sequencing S Barnes-UAB 1/20/06 1 Goals of research on proteins • To know which proteins are expressed in each cell, preferably one cell at a time • Major analytical challenges – Sensitivity - no PCR reaction for proteins – Larger number of protein forms than open reading frames – Huge dynamic range (109) – Spatial and time-dependent issues S Barnes-UAB 1/20/06 Changes at the protein level • To know how proteins are modified, information that cannot necessarily be deduced from the nucleotide sequence of individual genes. • Modification may take the form of – specific deletions (leader sequences), – enzymatically induced additions and subsequent deletions (e.g., phosphorylation and glycosylation), – intended chemical changes (e.g., alkylation of sulfhydryl groups), – and unwanted chemical changes (e.g., oxidation of sulfhydryl groups, nitration, etc.). S Barnes-UAB 1/20/06 2 Proteins once you have them Protein structure and protein-protein interaction – to determine how proteins assemble in solution – how they interact with each other – Transient structural and chemical changes that are part of enzyme catalysis, receptor activation and transporters S Barnes-UAB 1/20/06 So, what you need to know about mass spec • Substances have to be ionized to be detected.