Using the Spatial and Spectral Precision of Satellite Imagery to Predict Wildlife Occurrence Patterns
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In-Depth Review of Satellite Imagery / Earth Observation Technology in Official Statistics Prepared by Canada and Mexico
In-depth review of satellite imagery / earth observation technology in official statistics Prepared by Canada and Mexico Julio A. Santaella Conference of European Statisticians 67th plenary session Paris, France June 28, 2019 Earth observation (EO) EO is the gathering of information about planet Earth’s physical, chemical and biological systems. It involves monitoring and assessing the status of, and changes in, the natural and man-made environment Measurements taken by a thermometer, wind gauge, ocean buoy, altimeter or seismograph Photographs and satellite imagery Radar and sonar images Analyses of water or soil samples EO examples EO Processed information such as maps or forecasts Source: Group on Earth Observations (GEO) In-depth review of satellite imagery / earth observation technology in official statistics 2 Introduction Satellite imagery uses have expanded over time Satellite imagery provide generalized data for large areas at relatively low cost: Aligned with NSOs needs to produce more information at lower costs NSOs are starting to consider EO technology as a data collection instrument for purposes beyond agricultural statistics In-depth review of satellite imagery / earth observation technology in official statistics 3 Scope and definition of the review To survey how various types of satellite data and the techniques used to process or analyze them support the GSBPM To improve coordination of statistical activities in the UNECE region, identify gaps or duplication of work, and address emerging issues In-depth review of satellite imagery / earth observation technology in official statistics 4 Overview of recent activities • EO technology has developed progressively, encouraging the identification of new applications of this infrastructure data. -

The Contribution of Earth Observation Technologies to Monitoring Strategies of Cultural Landscapes and Sites
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2/W5, 2017 26th International CIPA Symposium 2017, 28 August–01 September 2017, Ottawa, Canada THE CONTRIBUTION OF EARTH OBSERVATION TECHNOLOGIES TO MONITORING STRATEGIES OF CULTURAL LANDSCAPES AND SITES B. Cuca a* a Dept. of Architecture, Built Environment and Construction Engineering, Politecnico di Milano, Via Ponzio 31, 20133 Milan, Italy – [email protected] KEY WORDS: Cultural landscapes, Earth Observation, satellite remote sensing, GIS, Cultural Heritage policy, geo-hazards ABSTRACT: Coupling of Climate change effects with management and protection of cultural and natural heritage has been brought to the attention of policy makers since several years. On the worldwide level, UNESCO has identified several phenomena as the major geo-hazards possibly induced by climate change and their possible hazardous impact to natural and cultural heritage: Hurricane, storms; Sea-level rise; Erosion; Flooding; Rainfall increase; Drought; Desertification and Rise in temperature. The same document further referrers to satellite Remote Sensing (EO) as one of the valuable tools, useful for development of “professional monitoring strategies”. More recently, other studies have highlighted on the impact of climate change effects on tourism, an economic sector related to build environment and traditionally linked to heritage. The results suggest that, in case of emergency the concrete threat could be given by the hazardous event itself; in case of ordinary administration, however, the threat seems to be a “hazardous attitude” towards cultural assets that could lead to inadequate maintenance and thus to a risk of an improper management of cultural heritage sites. This paper aims to illustrate potential benefits that advancements of Earth Observation technologies can bring to the domain of monitoring landscape heritage and to the management strategies, including practices of preventive maintenance. -

Improving the Usability of Nighttime Imagery from Low Light Sensors
Improving the Usability of Nighttime Imagery from Low Light Sensors Thomas F. Lee F. Joseph Turk Jeffrey D. Hawkins Cristian Mitrescu Naval Research Laboratory, Monterey California (USA) Steven D. Miller Cooperative Institute for Research in the Atmosphere Fort Collins Colorado (USA) Mike Haas Aerospace Corporation Silver Spring Maryland (USA) 1. Abstract This article presents the nighttime visible sensor on the Visible Infrared Imaging Radiometer Suite (VIIRS) instrument to be flown aboard the upcoming NPOESS and NPP polar-orbiting satellites. First, we will introduce the sensor and explain how it improves on a similar sensor, the Operational Linescan System (OLS) flown on the Defense Meteorological Satellite Program (DMSP) series. A brief summary of the new instrument will be given, followed by a few example products from the OLS. The paper will close with a discussion of how the crossing time of the satellite affects the number of scenes that will have lunar illumination. 2. Introduction Low light imagery from the Operational Linescan System (OLS) aboard the Defense Meteorological Satellite Program (DMSP) satellites (Johnson et al. 1994) has prompted a number of important applications never foreseen by the United States Air Force which originally designed and launched the sensor in the early 1970’s. The unforeseen applications include composites of worldwide city lights at night; detection of fires; imaging of the aurora; monitoring of fishing boats; imaging of snow fields; detection of bioluminescence (Miller et al. 2005); and the detection of power outages. However, the sensor is still underutilized for the application for which it was originally designed, the imaging of clouds using moonlight. -

Satellite Imagery and Change Over Time
R E S O U R C E L I B R A R Y A C T I V I T Y : 4 5 M I N S Satellite Imagery and Change Over Time Students view satellite images of places past and present and analyze the changes over time. G R A D E S 5, 6 S U B J E C T S Geography C O N T E N T S 5 Images, 1 Link, 1 PDF OVERVIEW Students view satellite images of places past and present and analyze the changes over time. For the complete activity with media resources, visit: http://www.nationalgeographic.org/activity/satellite-imagery-and-change-over-time/ DIRECTIONS 1. Discuss different ways to capture images of Earth from above. Have a whole-class discussion about how it’s possible to capture images of Earth from above. Project the satellite image of New York City and the aerial image of LaCrosse, Wisconsin. Ask: What technologies are used to capture images of Earth from above? Write students’ ideas on the board; these may include planes, helicopters, kites or balloons with cameras, and satellites. 2. Examine the changes in Las Vegas, Nevada, and its surroundings. Tell students that they will be looking at changes over time in different places on Earth using satellite imagery. Project the Growth in the Desert image of Las Vegas, Nevada, in 2007 and minimize the caption. Invite volunteers to point to different areas on the image as you use the prompts below. Ask: Where is the city? What patterns do you see in the city? (Straight lines are streets; the layout is a grid, with some diagonal roads.) What does the land look like outside of the city? (rugged, mountainous, like a desert) What landforms do you see? (mountains, lakes) Point out that the black area to the east of the city is Lake Meade, a reservoir created by the damming of the Colorado River. -
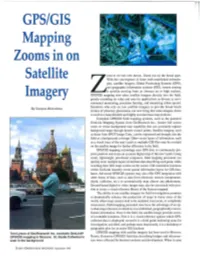
GPS/GIS Mapping Satellite Imagery
GPS/GIS Mapping Zooms in on OOM IN ON THE FINE DETAIL. Zoom out on the broad sp an. Satellite With the convergence of three well-established techn olo gies, satellite imagery, Global Position ing Systems (G PS), and geographic in fonnation systems (GIS), remote sensing is quickly moving frorn an abstract art to high realism. Imagery ZGPSIGIS mapping now takes satellite imagery directly into the field, greatly extending its value and uses for applications as di verse as envi ronmemal monitoring. precision farming. and measuring urban sprawl. Sciemists who rely on raw satellite imagery to provide broad brush By Suzanne Richardson strokes of planetary phenomena can now bring th at same imagery down to earLh to create detailed and high ly accurate base map products. Complete GPSIGIS fi eld mapping systems. such as the patented GeoLink Mapping System from GeoResearch Inc .. feature full sc reen rasler or vector background map capability that can accurately register background maps through known control points. Satellite imagery, such as Lh ose from SPOT Image Corp.. can be registered and brought into the field as a background coverage. Other vector layers of infomlation, such as a visual trace of the user's path or mul tiple GIS fil es may be overlaid on the satellite image for further efficiency in the fi eld. GPS/GIS mapping technology uses GPS data to continuously pin point position and create an accurate digital map of the user 's pmh. Using small, li ghtweight, pen-based computers. field mapping personnel can quickly elller multiple layers of attribute data describing elIcit point, while watching their GIS maps evolve on the screen. -
Image-Based Sociocultural Prediction Models
Working Paper No. 178 Viewing society from space: Image-based sociocultural prediction models by John M. Irvine, Richard J. Wood, and Payden McBee | December 2017 1 Afrobarometer Working Papers Working Paper No. 178 Viewing society from space: Image-based sociocultural prediction models by John M. Irvine, Richard J. Wood, and Payden McBee | December 2017 John M. Irvine (corresponding author) is chief scientist for data analytics at Charles Stark Draper Laboratory. Email: [email protected]. Richard J. Wood is a principal member of the technical staff at Charles Stark Draper Laboratory. Payden McBee is a fellow at Charles Stark Draper Laboratory. Abstract Applying new analytic methods to imagery data offers the potential to dramatically expand the information available for human geography. Satellite imagery can yield detailed local information about physical infrastructure, which we exploit for analysis of local socioeconomic conditions. Combining automated processing of satellite imagery with advanced modeling techniques provides a method for inferring measures of well-being, governance, and related sociocultural attributes from satellite imagery. This research represents a new approach to human geography by explicitly analyzing the relationship between observable physical attributes and societal characteristics and institutions of the region. Through analysis of commercial satellite imagery and Afrobarometer survey data, we have developed and demonstrated models for selected countries in sub-Saharan Africa (Botswana, Kenya, Zimbabwe). The findings show the potential for predicting people’s attitudes about the economy, security, leadership, social involvement, and related questions, based only on imagery-derived information. The approach pursued here builds on earlier work in Afghanistan. Models for predicting economic attributes (presence of key infrastructure, attitudes about the economy, perceptions of crime, and outlook toward the future) all exhibit statistically significant performance. -

Applications of Satellite Remote Sensing to Forested Ecosystems
Landscape Ecology vol. 3 no. 2 pp 131-143 (1989) SPB Academic Publishing bv, The Hague Applications of satellite remote sensing to forested ecosystems Louis R. Iverson', Robin Lambert Graham2 and Elizabeth A. Cook' 'Illinois Natural History Survey, 607 E. Peabody, Champaign, IL 61820 and Department of Forestry, University of Illinois, Champaign, IL 61820, USA; 2Environmental Sciences Division, Oak Ridge National Laboratory, P.O. Box 2006, Oak Ridge, TN 37831, USA Keywords: satellite, remote sensing, forest ecosystems, GIS, monitoring Abstract Since the launch of the first civilian earth-observing satellite in 1972, satellite remote sensing has provided increasingly sophisticated information on the structure and function of forested ecosystems. Forest classifica- tion and mapping, common uses of satellite data, have improved over the years as a result of more dis- criminating sensors, better classification algorithms, and the use of geographic information systems to incor- porate additional spatially referenced data such as topography. Land-use change, including conversion of forests for urban or agricultural development, can now be detected and rates of change calculated by superim- posing satellite images taken at different dates. Landscape ecological questions regarding landscape pattern and the variables controlling observed patterns can be addressed using satellite imagery as can forestry and ecological questions regarding spatial variations in physiological characteristics, productivity, successional patterns, forest structure, and forest decline. Introduction over varying scales of spatial resolution. The sophistication of applications evident in re- Since the launching of the first earth-observing cent years has been made possible by (1) the use of civilian Landsat satellite in 1972, satellite remote more spectrally and/or spatially discriminating sensing has been used for gathering synoptic infor- sensors; (2) the improvement of hardware and mation on forests. -

Digital Mapping Using High Resolution Satellite Imagery Based on 2D Affine Projection Model
Ono Tetsu DIGITAL MAPPING USING HIGH RESOLUTION SATELLITE IMAGERY BASED ON 2D AFFINE PROJECTION MODEL Tetsu ONO*, Susumu HATTORI**, Hiroyuki HASEGAWA***, Shin-ichi AKAMATSU* *Graduate School of Engineering, Kyoto University, Yoshida-Honmachi, Sakyo-ku, Kyoto 606-8501, JAPAN [email protected], [email protected] **Faculty of Engineering, Fukuyama University, 1 Sanzo, Gakuen-cho, Fukuyama, 729-0292, JAPAN [email protected] ***Geonet Inc, 1265-1-203, Shin-yoshida, Minato-ku, Yokohama, 223-0056, JAPAN [email protected] KEY WORDS: High-resolution satellite imagery, Topographic mapping, Digital ortho-imagery, 2D affine projection model ABSTRACT High-resolution satellite imagery is expected to reduce cost for medium and small scale topographic mapping. Because 1m high-resolution satellite imagery has a much narrower field angle, the projection of images is nearly approximated by parallel rather than central one. In this situation, the orientation model based on affine projection is effective for satellite imagery triangulation. Furthermore under the assumption that the satellite attitude is stable and the movement of the sensor position is almost linear, 2D affine projection model is applicable to basic equations for mapping. This paper discusses the application of the 2D affine projection model to high-resolution satellite imagery and SPOT scenes at various terrain area in JAPAN. The first topic is the approach to generate ortho-imagery using the model. The second topic is the real-time image positioning on a softcopy photogrammetric workstations for satellite imagery. 1 INTRODUCTION Precise digital maps generated from satellite imagery are assuming growing importance in the spatial information industry. -

The Significance of Using Satellite Imagery Data Only in Ecological Niche Modelling of Iberian Herps
Acta Herpetologica 7(2): 221-237, 2012 The significance of using satellite imagery data only in Ecological Niche Modelling of Iberian herps Neftalí Sillero1, José C. Brito2, Santiago Martín-Alfageme3, Eduardo García- Meléndez4, A.G. Toxopeus5, Andrew Skidmore5 1 Centro de Investigação em Ciências Geo-Espaciais (CICGE), Universidade do Porto, Faculdade de Ciências, Rua do Campo Alegre, 687, 4169-007 Porto, Portugal. Corresponding author. E-mail: neftali. [email protected] 2 CIBIO, Centro de Investigação em Biodiversidade e Recursos Genéticos da Universidade do Porto, Campus Agrário de Vairão, Rua Padre Armando Quintas, 4485-661 Vairão, Portugal 3 Servicio Transfronterizo de Información Geografica, Universidad de Salamanca, C.M. San Bartolome, Pz. Fray Luis de León 1-8, 37008 Salamanca, Spain 4 Área de Geodinámica Externa, Facultad de Ciencias Biológicas y Ambientales, Universidad de León, Campus de Vegazana s/n, 24071, León, Spain 5 ITC, Faculty of Geo-Information Science and Earth Observation, University of Twente, Hengeloses- traat 99, 7514 AE Enschede, The Netherlands Submitted on: 2011, 24th October; revised on: 2012, 20th March; accepted on: 2012, 11th April. Abstract. The environmental data used to calculate ecological niche models (ENM) are obtained mainly from ground-based maps (e.g., climatic interpolated surfaces). These data are often not available for less developed areas, or may be at an inappro- priate scale, and thus to obtain this information requires fieldwork. An alternative source of eco-geographical data comes from satellite imagery. Three sets of ENM were calculated exclusively with variables obtained (1) from optical and radar images only and (2) from climatic and altitude maps obtained by ground-based methods. -

Exploring the Use of Google Earth Imagery and Object-Based Methods in Land Use/Cover Mapping
Remote Sens. 2013, 5, 6026-6042; doi:10.3390/rs5116026 OPEN ACCESS Remote Sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing Article Exploring the Use of Google Earth Imagery and Object-Based Methods in Land Use/Cover Mapping Qiong Hu 1,2, Wenbin Wu 1,2,*, Tian Xia 1,2, Qiangyi Yu 1,2, Peng Yang 1,2, Zhengguo Li 1,2 and Qian Song 1,2 1 Key Laboratory of Agri-informatics, Ministry of Agriculture, Beijing 100081, China; E-Mails: [email protected] (Q.H.); [email protected] (T.X.); [email protected] (Q.Y.); [email protected] (P.Y.); [email protected] (Z.L.); [email protected] (Q.S.) 2 Institute of Agricultural Resources and Regional Planning, Chinese Academy of Agricultural Sciences, Beijing 100081, China * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +86-10-8210-5070; Fax: +86-10-8210-5070. Received: 9 September 2013; in revised form: 10 November 2013 / Accepted: 11 November 2013 / Published: 15 November 2013 Abstract: Google Earth (GE) releases free images in high spatial resolution that may provide some potential for regional land use/cover mapping, especially for those regions with high heterogeneous landscapes. In order to test such practicability, the GE imagery was selected for a case study in Wuhan City to perform an object-based land use/cover classification. The classification accuracy was assessed by using 570 validation points generated by a random sampling scheme and compared with a parallel classification of QuickBird (QB) imagery based on an object-based classification method. The results showed that GE has an overall classification accuracy of 78.07%, which is slightly lower than that of QB. -
Imaging Technology Using Google Earth and NASA World Wind
NCSR Education for a Sustainable Future www.ncsr.org Imaging Technology Using Google Earth and NASA World Wind Northwest Center for Sustainable Resources (NCSR) Chemeketa Community College, Salem, Oregon DUE #0455446 Funding provided by the National Science Foundation opinions expressed are those of the authors and not necessarily those of the foundation 1 Table of Contents Imaging Technology Using Google Earth and NASA World Wind.................................... 4 Introduction..................................................................................................................... 4 Google Earth................................................................................................................... 5 Site Description........................................................................................................... 5 Minimum System Requirements................................................................................. 5 NASA World Wind ......................................................................................................... 5 Site Description........................................................................................................... 5 Minimum System Requirements................................................................................. 6 Examples of Imagery Use............................................................................................... 7 Application of World Wind............................................................................................ -
Planet Imagery Product Specifications
PLANET IMAGERY PRODUCT SPECIFICATIONS [email protected] | PLANET.COM LAST UPDATED JANUARY 2018 TABLE OF CONTENTS LIST OF FIGURES _______________________________________________________________________________________ 3 LIST OF TABLES ________________________________________________________________________________________ 4 GLOSSARY ____________________________________________________________________________________________ 5 1. OVERVIEW OF DOCUMENT _____________________________________________________________________________ 7 1.1 Company Overview _________________________________________________________________________________ 7 1.2 Data Product Overview ______________________________________________________________________________ 7 2. SATELLITE CONSTELLATION AND SENSOR OVERVIEW _____________________________________________________ 8 2.1 PlanetScope Satellite Constellation and Sensor Characteristics ______________________________________________ 8 2.2 RapidEye Satellite Constellation and Sensor Characteristics ________________________________________________ 8 2.3 SkySat Satellite Constellation and Sensor Characteristics ___________________________________________________ 9 3. PLANETSCOPE IMAGERY PRODUCTS ____________________________________________________________________ 10 3.1 PlanetScope Basic Scene Product Specification _________________________________________________________ 10 3.2 PlanetScope Ortho Scenes Product Specification _________________________________________________________ 11 3.2.1 PlanetScope Visual Ortho Scene Product