Fire on the Wire: the IEEE 1934 High Performance Serial Bus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Getting Started with Your VXI-1394 Interface for Windows NT/98 And
VXI Getting Started with Your VXI-1394 Interface for Windows NT/98 VXI-1394 Interface for Windows NT/98 November 1999 Edition Part Number 322109D-01 Worldwide Technical Support and Product Information www.ni.com National Instruments Corporate Headquarters 11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 794 0100 Worldwide Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 284 5011, Canada (Calgary) 403 274 9391, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, China 0755 3904939, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Greece 30 1 42 96 427, Hong Kong 2645 3186, India 91805275406, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico (D.F.) 5 280 7625, Mexico (Monterrey) 8 357 7695, Netherlands 0348 433466, Norway 32 27 73 00, Poland 48 22 528 94 06, Portugal 351 1 726 9011, Singapore 2265886, Spain 91 640 0085, Sweden 08 587 895 00, Switzerland 056 200 51 51, Taiwan 02 2377 1200, United Kingdom 01635 523545 For further support information, see the Technical Support Resources appendix. To comment on the documentation, send e-mail to [email protected] © Copyright 1998, 1999 National Instruments Corporation. All rights reserved. Important Information Warranty The National Instruments VXI-1394 board is warranted against defects in materials and workmanship for a period of one year from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

A Technology Comparison Adopting Ultra-Wideband for Memsen’S File Sharing and Wireless Marketing Platform
A Technology Comparison Adopting Ultra-Wideband for Memsen’s file sharing and wireless marketing platform What is Ultra-Wideband Technology? Memsen Corporation 1 of 8 • Ultra-Wideband is a proposed standard for short-range wireless communications that aims to replace Bluetooth technology in near future. • It is an ideal solution for wireless connectivity in the range of 10 to 20 meters between consumer electronics (CE), mobile devices, and PC peripheral devices which provides very high data-rate while consuming very little battery power. It offers the best solution for bandwidth, cost, power consumption, and physical size requirements for next generation consumer electronic devices. • UWB radios can use frequencies from 3.1 GHz to 10.6 GHz, a band more than 7 GHz wide. Each radio channel can have a bandwidth of more than 500 MHz depending upon its center frequency. Due to such a large signal bandwidth, FCC has put severe broadcast power restrictions. By doing so UWB devices can make use of extremely wide frequency band while emitting very less amount of energy to get detected by other narrower band devices. Hence, a UWB device signal can not interfere with other narrower band device signals and because of this reason a UWB device can co-exist with other wireless devices. • UWB is considered as Wireless USB – replacement of standard USB and fire wire (IEEE 1394) solutions due to its higher data-rate compared to USB and fire wire. • UWB signals can co-exists with other short/large range wireless communications signals due to its own nature of being detected as noise to other signals. -
Avid DS Nitris Compositing and Effects Guide • 0130-05576-02A • February 2005
Avid® DS Nitris™ Compositing and Effects Guide Version 7.6 ™ make manage move | media Avid ® Copyright and Disclaimer Product specifications are subject to change without notice and do not represent a commitment on the part of Avid Technology, Inc. The software described in this document is furnished under a license agreement. You can obtain a copy of that license by visiting Avid's Web site at www.avid.com. The terms of that license are also available in the product in the same directory as the software. The software may not be reverse assembled and may be used or copied only in accordance with the terms of the license agreement. It is against the law to copy the software on any medium except as specifically allowed in the license agreement. No part of this document may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, for any purpose without the express written permission of Avid Technology, Inc. Copyright © 2004 Avid Technology, Inc. and its licensors. All rights reserved. Printed in USA. The Avid DS Nitris application uses JScript and Visual Basic Scripting Edition from Microsoft Corporation. Attn. Government User(s). Restricted Rights Legend U.S. GOVERNMENT RESTRICTED RIGHTS. This Software and its documentation are “commercial computer software” or “commercial computer software documentation.” In the event that such Software or documentation is acquired by or on behalf of a unit or agency of the U.S. Government, all rights with respect to this Software and documentation are subject to the terms of the License Agreement, pursuant to FAR §12.212(a) and/or DFARS §227.7202-1(a), as applicable. -
Serial Communication Buses
Computer Architecture 10 Serial Communication Buses Made wi th OpenOffi ce.org 1 Serial Communication SendingSending datadata oneone bitbit atat oneone time,time, sequentiallysequentially SerialSerial vsvs parallelparallel communicationcommunication cable cost (or PCB space), synchronization, distance ! speed ? ImprovedImproved serialserial communicationcommunication technologytechnology allowsallows forfor transfertransfer atat higherhigher speedsspeeds andand isis dominatingdominating thethe modernmodern digitaldigital technology:technology: RS232, RS-485, I2C, SPI, 1-Wire, USB, FireWire, Ethernet, Fibre Channel, MIDI, Serial Attached SCSI, Serial ATA, PCI Express, etc. Made wi th OpenOffi ce.org 2 RS232, EIA232 TheThe ElectronicElectronic IndustriesIndustries AllianceAlliance (EIA)(EIA) standardstandard RS-232-CRS-232-C (1969)(1969) definition of physical layer (electrical signal characteristics: voltage levels, signaling rate, timing, short-circuit behavior, cable length, etc.) 25 or (more often) 9-pin connector serial transmission (bit-by-bit) asynchronous operation (no clock signal) truly bi-directional transfer (full-duplex) only limited power can be supplied to another device numerous handshake lines (seldom used) many protocols use RS232 (e.g. Modbus) Made wi th OpenOffi ce.org 3 Voltage Levels RS-232RS-232 standardstandard convertconvert TTL/CMOS-levelTTL/CMOS-level signalssignals intointo bipolarbipolar voltagevoltage levelslevels toto improveimprove noisenoise immunityimmunity andand supportsupport longlong cablecable lengthslengths TTL/CMOS → RS232: 0V = logic zero → +3V…+12V (SPACE) +5V (+3.3V) = logic one → −3V…−12V (MARK) Some equipment ignores the negative level and accepts a zero voltage level as the "OFF" state The "dead area" between +3V and -3V may vary, many receivers are sensitive to differentials of 1V or less Made wi th OpenOffi ce.org 4 Data frame CompleteComplete one-byteone-byte frameframe consistsconsists of:of: start-bit (SPACE), data bits (7, 8), stop-bits (MARK) e.g. -

A Gumstix-Based MIDI-To-OSC Converter
midOSC: a Gumstix-Based MIDI-to-OSC Converter Sebastien´ Schiesser Institute for Computer Music and Sound Technology Zurich University of the Arts Baslerstrasse 30, 8048 Zurich, Switzerland [email protected] Abstract [14], sent to the remote-controlled devices location and con- A MIDI-to-OSC converter is implemented on a commer- verted back to MIDI. Until now, this has been done at each cially available embedded linux system, tighly integrated conversion point through a Max/MSP patch running on a with a microcontroller. A layered method is developed which computer connected to a MIDI interface. This is very de- permits the conversion of serial data such as MIDI to OSC manding in terms of hardware: in the backstage system of formatted network packets with an overall system latency the mAe, a computer is dedicated to conversion purposes below 5 milliseconds for common MIDI messages. only. And when MIDI devices are present on stage, an ad- The Gumstix embedded computer provide an interest- ditional laptop with interface is required. ing and modular platform for the development of such an The mAe is intended to be modular and to support several embedded applications. The project shows great potential “I/O hubs”, where audio and control data are collected and to evolve into a generic sensors-to-OSC ethernet converter dispatched. In order to avoid dependence on a converting which should be very useful for artistic purposes and could computer at each hub, it seemed appropriate to use a dedi- be used as a fast prototyping interface for gesture acquisition cated converter which can run independently, be stacked in devices. -

Introduction to Serial Communication
Technical Tutorial Introduction to Serial Communication Introduction to Serial Communication Technical Tutorial 2002 – 12 - 06 Technical Tutorial Introduction to Serial Communication Table of Contents 1: Introduction 1.1. DCE and DTE Devices 1.2. Synchronous data transfer 1.3. Asynchronous data transfer 2: RS232 2.1. RS232 on DB9 (9-pin D-type connector) 2.2. RS232 on DB25 (25-pin D-type connector) 2.3. RS232 on RJ-45 2.4. Signal Description 2.5. Limitations of RS232 3: RS422 and RS485 3.1. RS422 Serial Communication 3.2. RS485 Serial Communication 3.3. Converters 4: Summary Table 5: Serial Interface of Sena Products 5.1. HelloDevice Lite series 5.2. HelloDevice Pro series 5.3. HelloDevice Super series 5.4. IALink100 Series 5.5. VTS Series 2 Technical Tutorial Introduction to Serial Communication 1. Introduction The purpose of this application note is to attempt to describe the main elements in Serial Communication. This application note attempts to cover enough technical details of RS232, RS422 and RS485. 1.1. DCE and DTE Devices DTE stands for Data Terminal Equipment, and DCE stands for Data Communications Equipment. These terms are used to indicate the pin-out for the connectors on a device and the direction of the signals on the pins. Your computer is a DTE device, while most other devices such as modem and other serial devices are usually DCE devices. RS-232 has been around as a standard for decades as an electrical interface between Data Terminal Equipment (DTE) and Data Circuit-Terminating Equipment (DCE) such as modems or DSUs. -

Lab 5: Serial Communication (Sci/Spi) and C Objectives Required Materials Introduction
University of Florida EEL 3744 –Spring 2018 Dr. Eric M. Schwartz Electrical & Computer Engineering Dept. 28-Mar-18 Page 1/8 Revision 7 LAB 5: SERIAL COMMUNICATION (SCI/SPI) AND C OBJECTIVES As discovered in Homework 4, the asynchronous UART • Understand the basic operation and structure of protocol utilizes a transfer rate (denoted as the baud rate), as asynchronous and synchronous serial communication, well as two physical connections for each device to i.e., SCI (UART) and SPI. communicate data, i.e., a pin for Receiving data (Rx), and a pin • Utilize C programming constructs to create functions to for Transmitting data (Tx). The only way that this protocol interact with the XMEGA’s USART and SPI systems. functions correctly is if both devices agree on a common baud • Learn how to use SPI communication to interact with an rate. external IMU sensor package. • Stream and plot real-time 3D (XYZ) acceleration data SPI, on the other hand, utilizes a shared clock signal connected using the XMEGA’s USART system and Atmel Studio’s between (at least) two devices (usually denoted as SCK), where Data Visualizer. only one device is known as the “master” device, and where the other devices are “slaves.” Full-duplex communication is REQUIRED MATERIALS possible with SPI (i.e., two devices can talk to each other at the • µPAD v2.0 Development Board same time), although the master always starts any • Robotics Backpack communication between the devices. When the master wants • Digilent/NI Analog Discovery (DAD/NAD) kit to transmit/receive data to/from the slave(s), it generates the • LSM330.h header file synchronized Serial Clock signal (SCK). -

LPT, COM, 1394, USB, USB-C LPT IEEE 1284, LPT (Англ. Line Print Terminal; Также Параллельный Порт, По
LPT, COM, 1394, USB, USB-C LPT IEEE 1284, LPT (англ. Line Print Terminal; также параллельный порт, порт принтера) — международный стандарт параллельного интерфейса для подключения периферийных устройств персонального компьютера. В основном используется для подключения к компьютеру принтера, сканера и других внешних устройств (часто использовался для подключения внешних устройств хранения данных), однако может применяться и для других целей (организация связи между двумя компьютерами, подключение каких-либо механизмов телесигнализации и телеуправления). В основе данного стандарта лежит интерфейс Centronics и его расширенные версии (ECP, EPP). Название LPT образовано от наименования стандартного устройства принтера LPT1 (Line Printer Terminal или Line PrinTer) в операционных системах семейства MS-DOS. Параллельный порт Centronics — порт, используемый с 1981 года в персональных компьютерах фирмы IBM для подключения печатающих устройств, разработан фирмой Centronics Data Computer Corporation; уже давно стал стандартом де-факто, хотя в действительности официально на данный момент он не стандартизирован. Изначально этот порт был разработан только для симплексной (однонаправленной) передачи данных, так как предполагалось, что порт Centronics должен использоваться только для работы с принтером. Впоследствии разными фирмами были разработаны дуплексные расширения интерфейса (byte mode, EPP, ECP). Затем был принят международный стандарт IEEE 1284, описывающий как базовый интерфейс Centronics, так и все его расширения. Разъемы. Порт на стороне управляющего -

EB215 Local Interconnect Network (LIN)
Freescale Semiconductor EB215 Engineering Bulletin Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights the differences between two Local Interconnect Network (LIN) Physical Interfaces, namely the 33399 and the 33661. The LIN is a serial communication protocol designed to support automotive networks in conjunction with Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required. The 33399 and the 33661 are physical layer components dedicated to automotive sub-bus applications. They offer speech communication from 1.0 kbps to 20 kbps. There are two main operating modes: Normal and Sleep. For feature information, refer to the device data sheets for 33399 and 33661 © Freescale Semiconductor, Inc., 2005. All rights reserved. Differences Guide Differences Guide This section should be used as a quick guide to determine the main differences between the devices in a similar family. Using Table 1, you can note the differences most relevant to your system/application. This engineering bulletin should be used in conjunction with the most recent specification for each device, to ensure that all differences have been captured. Table 1. Device Differences Parameter 33399 33661 LIN Protocol Specification Addresses LIN 1.3 Applications Addresses LIN 2.0 Applications Terminal Out and Package 8-terminal SOICN. 8-terminal SOICN. One baud rate operation: Two baud rate operations: Baud Rate Operation 1.0 kbps to 20 kbps • 1.0 kbps to 10 kbps • 1.0 kbps to 20 kbps Capable of: Capable of: Controlling an external switchable voltage • Controlling an external switchable voltage INH Output regulator. -
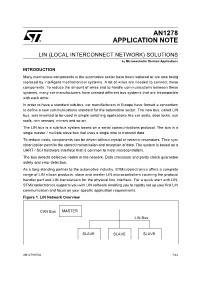
LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications
AN1278 APPLICATION NOTE LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications INTRODUCTION Many mechanical components in the automotive sector have been replaced or are now being replaced by intelligent mechatronical systems. A lot of wires are needed to connect these components. To reduce the amount of wires and to handle communications between these systems, many car manufacturers have created different bus systems that are incompatible with each other. In order to have a standard sub-bus, car manufacturers in Europe have formed a consortium to define a new communications standard for the automotive sector. The new bus, called LIN bus, was invented to be used in simple switching applications like car seats, door locks, sun roofs, rain sensors, mirrors and so on. The LIN bus is a sub-bus system based on a serial communications protocol. The bus is a single master / multiple slave bus that uses a single wire to transmit data. To reduce costs, components can be driven without crystal or ceramic resonators. Time syn- chronization permits the correct transmission and reception of data. The system is based on a UART / SCI hardware interface that is common to most microcontrollers. The bus detects defective nodes in the network. Data checksum and parity check guarantee safety and error detection. As a long-standing partner to the automotive industry, STMicroelectronics offers a complete range of LIN silicon products: slave and master LIN microcontrollers covering the protocol handler part and LIN transceivers for the physical line interface. For a quick start with LIN, STMicroelectronics supports you with LIN software enabling you to rapidly set up your first LIN communication and focus on your specific application requirements. -

PC 97 Hardware Design Guide
Part 4 — Device Design Guidelines CHAPTER 21 Printers This chapter presents the requirements and recommendations for printers under the Microsoft Windows family of operating systems. Version 1.1 Includes changes to References for Printers Contents Overview for Printers.............................. ............... 312 Basic Printer Features............................. ................ 312 Basic Features for IEEE 1394 Printers. ................. 312 Basic Features for USB Printers . ............... 312 Basic Features for IEEE 1284 Printers. ................. 313 PC 97 Design for Printers .......................... ................ 314 Plug and Play for Printers. ............... 314 Power Management for Print Components . .............. 315 Device Drivers and Installation for Printers . .................... 315 References for Printers ............................ ................ 318 Checklist for Printers ............................. ................ 320 312 PC 97 Design — Part 4 Device Design Guidelines Overview for Printers This section presents the key design issues for printers under Microsoft Windows. Printers and other devices attached to parallel ports should be capable of high- speed, bidirectional data transfers. The design criteria for parallel devices follow those for parallel ports described in the “Serial, Parallel, and Wireless Support” chapter. The PC 97 requirements for printers and parallel ports seek to ensure the following: • Ensure maximum speed for transfer of parallel data between the system and the peripheral. • Ensure a true Plug and Play experience for users. Basic Printer Features This section summarizes the basic hardware requirements for printers for PC 97. Basic Features for IEEE 1394 Printers This section defines requirements for printers that use IEEE 1394. 1. Compliance with PC 97 requirements for IEEE 1394 Required This bus is recommended in PC 97 for support of fast, high-density data transfer. For information about implementing IEEE 1394 for PC 97, see the “IEEE 1394” chapter in Part 3 of this guide. -

From Camac to Wireless Sensor Networks and Time- Triggered Systems and Beyond: Evolution of Computer Interfaces for Data Acquisition and Control
Janusz Zalewski / International Journal of Computing, 15(2) 2016, 92-106 Print ISSN 1727-6209 [email protected] On-line ISSN 2312-5381 www.computingonline.net International Journal of Computing FROM CAMAC TO WIRELESS SENSOR NETWORKS AND TIME- TRIGGERED SYSTEMS AND BEYOND: EVOLUTION OF COMPUTER INTERFACES FOR DATA ACQUISITION AND CONTROL. PART I Janusz Zalewski Dept. of Software Engineering, Florida Gulf Coast University Fort Myers, FL 33965, USA [email protected], http://www.fgcu.edu/zalewski/ Abstract: The objective of this paper is to present a historical overview of design choices for data acquisition and control systems, from the first developments in CAMAC, through the evolution of their designs operating in VMEbus, Firewire and USB, to the latest developments concerning distributed systems using, in particular, wireless protocols and time-triggered architecture. First part of the overview is focused on connectivity aspects, including buses and interconnects, as well as their standardization. More sophisticated designs and a number of challenges are addressed in the second part, among them: bus performance, bus safety and security, and others. Copyright © Research Institute for Intelligent Computer Systems, 2016. All rights reserved. Keywords: Data Acquisition, Computer Control, CAMAC, Computer Buses, VMEbus, Firewire, USB. 1. INTRODUCTION which later became international standards adopted by IEC and IEEE [4]-[7]. The design and development of data acquisition The CAMAC standards played a significant role and control systems has been driven by applications. in developing data acquisition and control The earliest and most prominent of those were instrumentation not only for nuclear research, but applications in scientific experimentation, which also for research in general and for industry as well arose in the early sixties of the previous century, [8].