Design of Parallel Vector/Scalar Floating Pointco-Processor for Fpgas E
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ASIC Implemented Microblaze-Based Coprocessor for Data Stream
ASIC-IMPLEMENTED MICROBLAZE-BASED COPROCESSOR FOR DATA STREAM MANAGEMENT SYSTEMS A Thesis Submitted to the Faculty of Purdue University by Linknath Surya Balasubramanian In Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical and Computer Engineering May 2020 Purdue University Indianapolis, Indiana ii THE PURDUE UNIVERSITY GRADUATE SCHOOL STATEMENT OF THESIS APPROVAL Dr. John J. Lee, Chair Department of Electrical and Computer Engineering Dr. Lauren A. Christopher Department of Electrical and Computer Engineering Dr. Maher E. Rizkalla Department of Electrical and Computer Engineering Approved by: Dr. Brian King Head of Graduate Program iii ACKNOWLEDGMENTS I would first like to express my gratitude to my advisor Dr. John J. Lee and my thesis committee members Dr. Lauren A. Christopher and Dr. Maher E. Rizkalla for their patience, guidance, and support during this journey. I would also like to thank Mrs. Sherrie Tucker for her patience, help, and encouragement. Lastly, I must thank Dr. Pranav Vaidya and Mr. Tareq S. Alqaisi for all their support, technical guidance, and advice. Thank you all for taking time and helping me complete this study. iv TABLE OF CONTENTS Page LIST OF TABLES :::::::::::::::::::::::::::::::::: vi LIST OF FIGURES ::::::::::::::::::::::::::::::::: vii ABSTRACT ::::::::::::::::::::::::::::::::::::: ix 1 INTRODUCTION :::::::::::::::::::::::::::::::: 1 1.1 Previous Work ::::::::::::::::::::::::::::::: 1 1.2 Motivation :::::::::::::::::::::::::::::::::: 2 1.3 Thesis Outline :::::::::::::::::::::::::::::::: -

Robust Architectural Support for Transactional Memory in the Power Architecture
Robust Architectural Support for Transactional Memory in the Power Architecture Harold W. Cain∗ Brad Frey Derek Williams IBM Research IBM STG IBM STG Yorktown Heights, NY, USA Austin, TX, USA Austin, TX, USA [email protected] [email protected] [email protected] Maged M. Michael Cathy May Hung Le IBM Research IBM Research (retired) IBM STG Yorktown Heights, NY, USA Yorktown Heights, NY, USA Austin, TX, USA [email protected] [email protected] [email protected] ABSTRACT in current p795 systems, with 8 TB of DRAM), as well as On the twentieth anniversary of the original publication [10], strengths in RAS that differentiate it in the market, adding following ten years of intense activity in the research lit- TM must not compromise any of these virtues. A robust erature, hardware support for transactional memory (TM) system is one that is sturdy in construction, a trait that has finally become a commercial reality, with HTM-enabled does not usually come to mind in respect to HTM systems. chips currently or soon-to-be available from many hardware We structured TM to work in harmony with features that vendors. In this paper we describe architectural support for support the architecture's scalability. Our goal has been to TM provide a comprehensive programming environment includ- TM added to a future version of the Power ISA . Two im- ing support for simple system calls and debug aids, while peratives drove the development: the desire to complement providing a robust (in the sense of "no surprises") execu- our weakly-consistent memory model with a more friendly tion environment with reasonably consistent performance interface to simplify the development and porting of multi- and without unexpected transaction failures.2 TM must be threaded applications, and the need for robustness beyond usable throughout the system stack: in hypervisors, oper- that of some early implementations. -
A Soft Processor Microblaze-Based Embedded System for Cardiac Monitoring
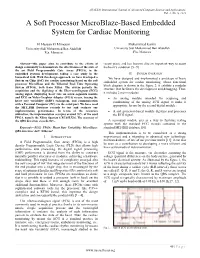
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 4, No. 9, 2013 A Soft Processor MicroBlaze-Based Embedded System for Cardiac Monitoring El Hassan El Mimouni Mohammed Karim University Sidi Mohammed Ben Abdellah University Sidi Mohammed Ben Abdellah Fès, Morocco Fès, Morocco Abstract—this paper aims to contribute to the efforts of recent years, and has become also an important way to assert design community to demonstrate the effectiveness of the state of the heart’s condition [5 - 9]. the art Field Programmable Gate Array (FPGA), in the embedded systems development, taking a case study in the II. SYSTEM OVERVIEW biomedical field. With this design approach, we have developed a We have designed and implemented a prototype of basic System on Chip (SoC) for cardiac monitoring based on the soft embedded system for cardiac monitoring, whose functional processor MicroBlaze and the Xilkernel Real Time Operating block diagram is shown in the figure 2; it exhibits a modular System (RTOS), both from Xilinx. The system permits the structure that facilitates the development and debugging. Thus, acquisition and the digitizing of the Electrocardiogram (ECG) analog signal, displaying heart rate on seven segments module it includes 2 main modules: and ECG on Video Graphics Adapter (VGA) screen, tracing the An analog module intended for acquiring and heart rate variability (HRV) tachogram, and communication conditioning of the analog ECG signal to make it with a Personal Computer (PC) via the serial port. We have used appropriate for use by the second digital module ; the MIT_BIH Database records to test and evaluate our implementation performance. -

Modelling the Armv8 Architecture, Operationally: Concurrency and ISA
Modelling the ARMv8 Architecture, Operationally: Concurrency and ISA Shaked Flur1 Kathryn E. Gray1 Christopher Pulte1 Susmit Sarkar2 Ali Sezgin1 Luc Maranget3 Will Deacon4 Peter Sewell1 1 University of Cambridge, UK 2 University of St Andrews, UK 3 INRIA, France 4 ARM Ltd., UK [email protected] [email protected] [email protected] [email protected] Abstract Keywords Relaxed Memory Models, semantics, ISA In this paper we develop semantics for key aspects of the ARMv8 multiprocessor architecture: the concurrency model and much of the 64-bit application-level instruction set (ISA). Our goal is to 1. Introduction clarify what the range of architecturally allowable behaviour is, and The ARM architecture is the specification of a wide range of pro- thereby to support future work on formal verification, analysis, and cessors: cores designed by ARM that are integrated into devices testing of concurrent ARM software and hardware. produced by many other vendors, and cores designed ab initio by Establishing such models with high confidence is intrinsically ARM architecture partners, such as Nvidia and Qualcomm. The difficult: it involves capturing the vendor’s architectural intent, as- architecture defines the properties on which software can rely on, pects of which (especially for concurrency) have not previously identifying an envelope of behaviour that all these processors are been precisely defined. We therefore first develop a concurrency supposed to conform to. It is thus a central interface in the industry, model with a microarchitectural flavour, abstracting from many between those hardware vendors and software developers. It is also hardware implementation concerns but still close to hardware- a desirable target for software verification and analysis: software designer intuition. -

Performance Evaluation of FPGA Based Embedded ARM Processor
10.1109/ULTSYM.2013.0135 Performance Evaluation of FPGA based Embedded ARM Processor for Ultrasonic Imaging Spenser Gilliland, Pramod Govindan, Thomas Gonnot and Jafar Saniie Department of Electrical and Computer Engineering Illinois Institute of Technology, Chicago IL, U.S.A. Abstract- This study evaluates the performance of an FPGA based embedded ARM processor system to implement signal processing for ultrasonic imaging and nondestructive testing applications. FPGA based embedded processors possess many advantages including a reduced overall development time, increased performance, and the ability to perform hardware- software (HW/SW) co-design. This study examines the execution performance of split spectrum processing, chirplet signal decomposition, Wigner-Ville distributions and short time Fourier transform implementations, on two embedded processing platforms: a Xilinx Virtex-5 FPGA with embedded MicroBlaze processor and a Xilinx Zynq FPGA with embedded ARM processor. Overall, the Xilinx Zynq FPGA significantly outperforms the Virtex-5 based system in software applications I. INTRODUCTION Figure 1. RUSH SoC setup Generally, ultrasonic imaging applications use personal computers or hand held devices. As these devices are not frequency diverse flaw detection [1], parametric echo specifically designed for efficiently executing estimation [2], and joint time-frequency distribution [3]) on computationally intensive ultrasonic signal processing the RUSH platform using a Xilinx Virtex-5 FPGA with an algorithms, the performance of these applications can be embedded soft-core MicroBlaze processor [4,5] and a improved by executing the algorithms using a dedicated Xilinx Zynq 7020 FPGA with an embedded ARM processor embedded system-on-chip (SoC) hardware. However, [6,7] as shown in Figure 2. porting these applications onto an embedded system requires deep knowledge of the processor architecture and RUSH embedded software development tools. -

Computer Architectures an Overview
Computer Architectures An Overview PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 25 Feb 2012 22:35:32 UTC Contents Articles Microarchitecture 1 x86 7 PowerPC 23 IBM POWER 33 MIPS architecture 39 SPARC 57 ARM architecture 65 DEC Alpha 80 AlphaStation 92 AlphaServer 95 Very long instruction word 103 Instruction-level parallelism 107 Explicitly parallel instruction computing 108 References Article Sources and Contributors 111 Image Sources, Licenses and Contributors 113 Article Licenses License 114 Microarchitecture 1 Microarchitecture In computer engineering, microarchitecture (sometimes abbreviated to µarch or uarch), also called computer organization, is the way a given instruction set architecture (ISA) is implemented on a processor. A given ISA may be implemented with different microarchitectures.[1] Implementations might vary due to different goals of a given design or due to shifts in technology.[2] Computer architecture is the combination of microarchitecture and instruction set design. Relation to instruction set architecture The ISA is roughly the same as the programming model of a processor as seen by an assembly language programmer or compiler writer. The ISA includes the execution model, processor registers, address and data formats among other things. The Intel Core microarchitecture microarchitecture includes the constituent parts of the processor and how these interconnect and interoperate to implement the ISA. The microarchitecture of a machine is usually represented as (more or less detailed) diagrams that describe the interconnections of the various microarchitectural elements of the machine, which may be everything from single gates and registers, to complete arithmetic logic units (ALU)s and even larger elements. -

Evaluation of Synthesizable CPU Cores
Evaluation of synthesizable CPU cores DANIEL MATTSSON MARCUS CHRISTENSSON Maste r ' s Thesis Com p u t e r Science an d Eng i n ee r i n g Pro g r a m CHALMERS UNIVERSITY OF TECHNOLOGY Depart men t of Computer Engineering Gothe n bu r g 20 0 4 All rights reserved. This publication is protected by law in accordance with “Lagen om Upphovsrätt, 1960:729”. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior permission of the authors. Daniel Mattsson and Marcus Christensson, Gothenburg 2004. Evaluation of synthesizable CPU cores Abstract The three synthesizable processors: LEON2 from Gaisler Research, MicroBlaze from Xilinx, and OpenRISC 1200 from OpenCores are evaluated and discussed. Performance in terms of benchmark results and area resource usage is measured. Different aspects like usability and configurability are also reviewed. Three configurations for each of the processors are defined and evaluated: the comparable configuration, the performance optimized configuration and the area optimized configuration. For each of the configurations three benchmarks are executed: the Dhrystone 2.1 benchmark, the Stanford benchmark suite and a typical control application run as a benchmark. A detailed analysis of the three processors and their development tools is presented. The three benchmarks are described and motivated. Conclusions and results in terms of benchmark results, performance per clock cycle and performance per area unit are discussed and presented. Sammanfattning De tre syntetiserbara processorerna: LEON2 från Gaisler Research, MicroBlaze från Xilinx och OpenRISC 1200 från OpenCores utvärderas och diskuteras. -

An Evaluation of Soft Processors As a Reliable Computing Platform
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2015-07-01 An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Electrical and Computer Engineering Commons BYU ScholarsArchive Citation Gardiner, Michael Robert, "An Evaluation of Soft Processors as a Reliable Computing Platform" (2015). Theses and Dissertations. 5509. https://scholarsarchive.byu.edu/etd/5509 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Michael J. Wirthlin, Chair Brad L. Hutchings Brent E. Nelson Department of Electrical and Computer Engineering Brigham Young University July 2015 Copyright © 2015 Michael Robert Gardiner All Rights Reserved ABSTRACT An Evaluation of Soft Processors as a Reliable Computing Platform Michael Robert Gardiner Department of Electrical and Computer Engineering, BYU Master of Science This study evaluates the benefits and limitations of soft processors operating in a radiation-hardened FPGA, focusing primarily on the performance and reliability of these systems. FPGAs designs for four popular soft processors, the MicroBlaze, LEON3, Cortex- M0 DesignStart, and OpenRISC 1200 are developed for a Virtex-5 FPGA. The performance of these soft processor designs is then compared on ten widely-used benchmark programs. -

Outline What Makes a Good ISA? Programmability Implementability
Outline What Makes a Good ISA? • Instruction Sets in General • Programmability • MIPS Assembly Programming • Easy to express programs efficiently? • Other Instruction Sets • Implementability • Goals of ISA Design • Easy to design high-performance implementations (i.e., microarchitectures)? • RISC vs. CISC • Intel x86 (IA-32) • Compatibility • Easy to maintain programmability as languages and programs evolve? • Easy to maintain implementability as technology evolves? © 2012 Daniel J. Sorin 66 © 2012 Daniel J. Sorin 67 from Roth and Lebeck from Roth and Lebeck Programmability Implementability • Easy to express programs efficiently? • Every ISA can be implemented • For whom? • But not every ISA can be implemented well • Human • Bad ISA bad microarchitecture (slow, power-hungry, etc.) • Want high-level coarse-grain instructions • As similar to HLL as possible • We’d like to use some of these high-performance • This is the way ISAs were pre-1985 implementation techniques • Compilers were terrible, most code was hand-assembled • Pipelining, parallel execution, out-of-order execution • Compiler • We’ll discuss these later in the semester • Want low-level fine-grain instructions • Compiler can’t tell if two high-level idioms match exactly or not • Certain ISA features make these difficult • This is the way most post-1985 ISAs are • Variable length instructions • Optimizing compilers generate much better code than humans • Implicit state (e.g., condition codes) • ICQ: Why are compilers better than humans? • Wide variety of instruction formats © 2012 Daniel J. Sorin 68 © 2012 Daniel J. Sorin 69 from Roth and Lebeck from Roth and Lebeck Compatibility Compatibility in the Age of VMs • Few people buy new hardware … if it means they have to • Virtual machine (VM) : piece of software that emulates buy new software, too behavior of hardware platform • Intel was the first company to realize this • Examples: VMWare, Xen, Simics • ISA must stay stable, no matter what (microarch. -

Korea Tech Conference
-Merging of Linux/uClinux 2.6 & the Benchmark- Korea Tech Conference 2005년 5월 14일, 서울 2005년 5월 14일 CE Linux Forum Korea Tech Conference 1 -Merging of Linux/uClinux 2.6 & the Benchmark- Merging of Linux/uClinux 2.6 & the Benchmark Hyok S. Choi (최혁승) Linux Kernel armnommu maintainer Digital Media R&D Center Samsung Electronics Co.,Ltd. 2005년 5월 14일 CE Linux Forum Korea Tech Conference 2 -Merging of Linux/uClinux 2.6 & the Benchmark- Contents • Introduction of uClinux • Introduction of Linux 2.6 for MMU-less ARM Project • Recent Changes of ARM Linux Kernel • The Benchmark • What’s the next? 2005년 5월 14일 CE Linux Forum Korea Tech Conference 3 -Merging of Linux/uClinux 2.6 & the Benchmark- Introduction of uClinux(1/2) • What is uClinux? – A Linux derivative which is independent from the H/W supported Paging Management of MMU. – The first uClinux - 1998, Linux 2.0 – Currently, under merging state into the mainline kernel 2.6. (m68knommu, v850, h8300 is done) – Supported Architectures : • Motorola M68K/ColdFire, ARM 7/9/10/11, Intel i960, Sun SPARC, ADI BlackFin, Axis Etrax, PRISMA, Atari 68k, Xilinx Microblaze, NEC v850, Hitachi H8 – Market and Devices : • Gateways, VoIP phones, Blutooth devices, web-cams, Auto Vehicle Locators, Security Appliances, Handhelds 2005년 5월 14일 CE Linux Forum Korea Tech Conference 4 -Merging of Linux/uClinux 2.6 & the Benchmark- Introduction of uClinux(2/2) “The one of the most used Linux distribution in real embedded systems on commercial product.” • Snapshot of the Embedded Linux market -- March, 2004 , linuxdevices.com -
RTEMS Development Roadmap
OAR RTEMS Roadmap 2012 Joel Sherrill, Ph.D. OAR Corporation September 2012 OAR RTEMS in a Nutshell • RTEMS is an embedded real-time O/S – deterministic performance and resource usage • RTEMS is free software – no restrictions or obligations placed on fielded applications • Supports open standards like POSIX • Available for 15+ CPU families and 150+ BSPs • Training and support services available http://www.rtems.org 2 OAR RTEMS Applications BMW Superbike Avenger Curiosity Solar Dynamics Observatory ARTEMIS Galileo IOV DAWN MRO/Electra Milkymist Avenger Planck TECHNIC 1 LISA ST-5 Pathfinder Proba-2 Herschel http://www.rtems.org Images Credit: NASA and ESA 3 OAR Outline of Remainder • Community Driven Focus • Development Activities • Wish List for Future Improvements • Active Release Branch Updates • OAR Support Subscriptions & Legacy Releases • Conclusion http://www.rtems.org 4 OAR Community Driven Focus • Without users, project has no reason to exist! • Users drive requirements – Please let us know what you need • Users provide or fund many improvements – Again those reflect your requirements • Most bug reports are from users RTEMS Evolves to Meet Your Needs http://www.rtems.org 5 RTEMS Project Participation In OAR Student Programs • Google Summer of Code (2008-2012) – Almost 40 students over the five years • Google Code-In (2010-2011) – High school students did ~200 tasks for RTEMS – Included only twenty FOSS projects • ESA Summer of Code In Space (2011-2012) – Small program with only twenty FOSS projects involved http://www.rtems.org -

In Using the GNU Compiler Collection (GCC)
Using the GNU Compiler Collection For gcc version 6.1.0 (GCC) Richard M. Stallman and the GCC Developer Community Published by: GNU Press Website: http://www.gnupress.org a division of the General: [email protected] Free Software Foundation Orders: [email protected] 51 Franklin Street, Fifth Floor Tel 617-542-5942 Boston, MA 02110-1301 USA Fax 617-542-2652 Last printed October 2003 for GCC 3.3.1. Printed copies are available for $45 each. Copyright c 1988-2016 Free Software Foundation, Inc. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with the Invariant Sections being \Funding Free Software", the Front-Cover Texts being (a) (see below), and with the Back-Cover Texts being (b) (see below). A copy of the license is included in the section entitled \GNU Free Documentation License". (a) The FSF's Front-Cover Text is: A GNU Manual (b) The FSF's Back-Cover Text is: You have freedom to copy and modify this GNU Manual, like GNU software. Copies published by the Free Software Foundation raise funds for GNU development. i Short Contents Introduction ::::::::::::::::::::::::::::::::::::::::::::: 1 1 Programming Languages Supported by GCC ::::::::::::::: 3 2 Language Standards Supported by GCC :::::::::::::::::: 5 3 GCC Command Options ::::::::::::::::::::::::::::::: 9 4 C Implementation-Defined Behavior :::::::::::::::::::: 373 5 C++ Implementation-Defined Behavior ::::::::::::::::: 381 6 Extensions to