Understanding the Coefficient of Restitution (COR) Using Mass/Spring Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Impulse and Momentum
Impulse and Momentum All particles with mass experience the effects of impulse and momentum. Momentum and inertia are similar concepts that describe an objects motion, however inertia describes an objects resistance to change in its velocity, and momentum refers to the magnitude and direction of it's motion. Momentum is an important parameter to consider in many situations such as braking in a car or playing a game of billiards. An object can experience both linear momentum and angular momentum. The nature of linear momentum will be explored in this module. This section will discuss momentum and impulse and the interconnection between them. We will explore how energy lost in an impact is accounted for and the relationship of momentum to collisions between two bodies. This section aims to provide a better understanding of the fundamental concept of momentum. Understanding Momentum Any body that is in motion has momentum. A force acting on a body will change its momentum. The momentum of a particle is defined as the product of the mass multiplied by the velocity of the motion. Let the variable represent momentum. ... Eq. (1) The Principle of Momentum Recall Newton's second law of motion. ... Eq. (2) This can be rewritten with accelleration as the derivate of velocity with respect to time. ... Eq. (3) If this is integrated from time to ... Eq. (4) Moving the initial momentum to the other side of the equation yields ... Eq. (5) Here, the integral in the equation is the impulse of the system; it is the force acting on the mass over a period of time to . -
AIAA 19Th Fluid Dynamics, Plasma Dynamics and Lasers Conference June 8-10, 1987/Honolulu, Hawaii
AIAA-87 -1407 Electron-Cyclotron-Resonance (ECR) Plasma Acceleration J. C. Sercel Jet Propulsion Laboratory California Institute of Technology Pasadena, California AIAA 19th Fluid Dynamics, Plasma Dynamics and Lasers Conference June 8-10, 1987/Honolulu, Hawaii For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 1633 Broadway, New York, NY 10019 AIAA-87-1407 ELECTRON-CYCLOTRON-RESONANCE (ECR) PLASMA ACCELERATION Joel C. Sercel* Jet Propulsion Laboratory California Institute of Technology Pasadena, California Abstract P power per unit volume, W/m3 R position vector, m A research effort directed at analytically v velocity, mls and experimentally investigating Electron U energy, J or eV Cyclotron-Resonance (ECR) plasma acceleration V electrostatic potential, volts is outlined. Relevant past research is reviewed. T temperature, Kelvin or eV The prospects for application of ECR plasma acceleration to spacecraft propulsion are described. It is shown that previously unexplained losses in converting microwave magnetic dipole moment power to directed kinetic power via ECR plasma reaction cross section, m2 acceleration can be understood in terms of diffusion of energized plasma to the physical time constant, s walls of the accelerator. It is argued that line radiation losses from electron-ion and electron SubscriPts atom inelastic collisions should be less than estimated in past research. Based on this new A acceleration understanding, the expectation now exists that B Bohm efficient ECR plasma accelerators can be e electron designed for application to high specific impulse ex excitation spacecraft propulsion. ionization summation variable refers to lowest energy level Acronyms and Abbreviations p perpendicular r relative D-He3 Deuterium Helium-Three sp space charge induced ECR Electron-Cyclotron-Resonance to t total GE General Electric JPL Jet Propulsion Laboratory LeRC Lewis Research Center I. -

Analysis of Thruster Requirements and Capabilities for Local Satellite Clusters
I I ANALYSIS OF THRUSTER REQUIREMENTS AND CAPABILITIES FOR LOCAL SATELLITE CLUSTERS G. I. Yashkot, D.E. Hastingstt I Massachusetts Institute of Technology Cambridge, Massachusetts I Abstract This paper examines the propulsive requirements necessary to maintain the relative positions of satellites orbiting in a local cluster. Formation of these large baseline arrays could allow high resolution imaging of terrestrial or I astronomical targets using techniques similar to those used for decades in radio interferometry. A key factor in the image quality is the relative positions of the individual apertures in the sparse array. The relative positions of satellites in a cluster are altered by "tidal" accelerations which are a function of the cluster baseline and orbit altitude. These accelerations must be counteracted by continuous thrusting to maintain the relative positions of the satellites. I Analysis of propulsive system requirements, limited by spacecraft power, volume, and mass constraints, indicates that specific impulses and efficiencies typical of ion engines or Hall thrusters (SPT's) are necessary to maintain large cluster baselines. In addition, required thrust to spacecraft mass ratios for reasonable size clusters are approximately I 15J..LNlkg. Finally, the ability of a proposed linear ion microthruster to meet these requirements is examined. A variation of Brophy's method is used to show that primary electron containment lengths on the order of 10 mm are I necessary to achieve those thruster characteristics. Preliminary sizing -

Phenomenological Review on Quark–Gluon Plasma: Concepts Vs
Review Phenomenological Review on Quark–Gluon Plasma: Concepts vs. Observations Roman Pasechnik 1,* and Michal Šumbera 2 1 Department of Astronomy and Theoretical Physics, Lund University, SE-223 62 Lund, Sweden 2 Nuclear Physics Institute ASCR 250 68 Rez/Prague,ˇ Czech Republic; [email protected] * Correspondence: [email protected] Abstract: In this review, we present an up-to-date phenomenological summary of research developments in the physics of the Quark–Gluon Plasma (QGP). A short historical perspective and theoretical motivation for this rapidly developing field of contemporary particle physics is provided. In addition, we introduce and discuss the role of the quantum chromodynamics (QCD) ground state, non-perturbative and lattice QCD results on the QGP properties, as well as the transport models used to make a connection between theory and experiment. The experimental part presents the selected results on bulk observables, hard and penetrating probes obtained in the ultra-relativistic heavy-ion experiments carried out at the Brookhaven National Laboratory Relativistic Heavy Ion Collider (BNL RHIC) and CERN Super Proton Synchrotron (SPS) and Large Hadron Collider (LHC) accelerators. We also give a brief overview of new developments related to the ongoing searches of the QCD critical point and to the collectivity in small (p + p and p + A) systems. Keywords: extreme states of matter; heavy ion collisions; QCD critical point; quark–gluon plasma; saturation phenomena; QCD vacuum PACS: 25.75.-q, 12.38.Mh, 25.75.Nq, 21.65.Qr 1. Introduction Quark–gluon plasma (QGP) is a new state of nuclear matter existing at extremely high temperatures and densities when composite states called hadrons (protons, neutrons, pions, etc.) lose their identity and dissolve into a soup of their constituents—quarks and gluons. -

Digitalcommons@University of Nebraska - Lincoln
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Instructional Materials in Physics and Calculus-Based General Physics Astronomy 1975 COLLISIONS Follow this and additional works at: https://digitalcommons.unl.edu/calculusbasedphysics Part of the Other Physics Commons "COLLISIONS" (1975). Calculus-Based General Physics. 6. https://digitalcommons.unl.edu/calculusbasedphysics/6 This Article is brought to you for free and open access by the Instructional Materials in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Calculus-Based General Physics by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Module -- STUDY GUIDE COLLISIONS INTRODUCTION If you have ever watched or played pool, football, baseball, soccer, hockey, or been involved in an automobile accident you have some idea about the results of a collision. We are interested in studying collisions for a variety of reasons. For example, you can determine the speed of a bullet by making use of the physics of the collision process. You can also estimate the speed of an automobile before the accident by knowing the physics of the collision process and a few other physical principles. Physicists use collisions to determine the properties of atomic and subatomic particles. Essentially, a particle accelerator is a device that provides a controlled collision process between subatomic particles so that, among other things, some of the properties of the target particle can be studied. In addition the study of collisions is an example of the use of a fundamental physical tool, i.e., a conservation law. A conservation law implies that something remains the same, i.e., is conserved, as you have seen in a previous module, Conservation of Energy. -
The Franck-Hertz Experiment
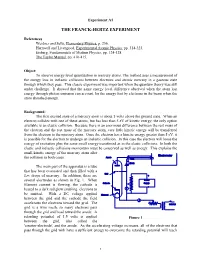
Experiment A1 THE FRANCK-HERTZ EXPERIMENT References Weidner and Sells, Elementary Physics, p. 256. Harnwell and Livengood, Experimental Atomic Physics, pp. 314-323. Eisberg, Fundamentals of Modern Physics, pp. 124-128 The Taylor Manual, pp. 410-415. Object: To observe energy level quantization in mercury atoms. The method uses a measurement of the energy loss in inelastic collisions between electrons and atomic mercury in a gaseous state through which they pass. This classic experiment was important when the quantum theory was still under challenge. It showed that the same energy level difference observed when the atom lost energy through photon emission can account for the energy lost by electrons in the beam when the atom absorbed energy. Background: The first excited state of a mercury atom is about 5 volts above the ground state. When an electron collides with one of these atoms, but has less than 5 eV of kinetic energy, the only option available is an elastic collision. Because there is an enormous difference between the rest mass of the electron and the rest mass of the mercury atom, very little kinetic energy will be transferred from the electron to the mercury atom. Once the electron has a kinetic energy greater than 5 eV, it is possible for the electron to undergo an inelastic collision. In this case the electron will loose the energy of excitation plus the same small energy transferred as in the elastic collisions. In both the elastic and inelastic collisions momentum must be conserved as well as energy. This explains the small kinetic energy of the mercury atom after the collision in both cases. -

Inelastic Collision Processes of Low Energy Protons in Liquid Water
Title Inelastic collision processes of low energy protons in liquid water Author(s) Date, H.; Sutherland, K.L.; Hayashi, T.; Matsuzaki, Y.; Kiyanagi, Y. Radiation Physics and Chemistry, 75(2), 179-187 Citation https://doi.org/10.1016/j.radphyschem.2005.10.002 Issue Date 2006-02 Doc URL http://hdl.handle.net/2115/7380 Type article (author version) File Information RPC75_2.pdf Instructions for use Hokkaido University Collection of Scholarly and Academic Papers : HUSCAP Inelastic collision processes of low energy protons in liquid water H. Date*, K.L. Sutherland1, T. Hayashi1, Y. Matsuzaki2, Y. Kiyanagi2 School of Medicine, Hokkaido University, Sapporo 060-0812, Japan 1Japan Science and Technology Agency, Tokyo 105-6218, Japan 2Graduate School of Engineering, Hokkaido University, Sapporo 060-8628, Japan Abstract Production probabilities of ion and excited particle species along the proton beam track in liquid water are estimated around the Bragg peak region, taking into account charge changing processes and energetic secondary electron (δ-ray) behavior. Ionization and excitation processes are divided into two categories in this study: primary processes associated with direct proton (or hydrogen) interaction and secondary processes arising from the electrons ejected by the primary process. We show that the number of events in the secondary processes producing ions and excited particles is larger than that of the primary processes around the Bragg peak while neutralized protons (i.e., hydrogen) with low energy have a large contribution to direct ionization. Effects of charge changing processes on ionization and excitation are also discussed. Key words: proton Bragg peak, inelastic collision, δ-ray, charge transfer, cross sections, liquid water *Corresponding author: Department of Health Sciences, School of Medicine, Hokkaido University N12-W5, Kitaku, Sapporo 060-0812, JAPAN Phone#: +81-11-706-3423 Fax#: +81-11-706-4916 E-mail: [email protected] 1. -

Experimental and Computational Studies of Electric Thruster Plasma
Experimental and Computational Studies of Electric Thruster Plasma Radiation Emission by Murat C¸elik B.S., Aerospace Engineering and Physics, University of Michigan, 2000 M.S., Aeronautics, California Institute of Technology, 2001 Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Doctor of Philosophy at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY May 2007 c Massachusetts Institute of Technology 2007. All rights reserved. Author......................................................................................... Department of Aeronautics and Astronautics May 14, 2007 Certified by..................................................................................... Manuel Mart´ınez-S´anchez Professor, Aeronautics and Astronautics Thesis Supervisor Certified by..................................................................................... Oleg Batishchev Principal Research Scientist, Aeronautics and Astronautics Thesis Supervisor Read by........................................................................................ Daniel Hastings Professor, Aeronautics and Astronautics Read by........................................................................................ Vlad Hruby President, Busek Co. Inc. Read by........................................................................................ David Miller Professor, Aeronautics and Astronautics Accepted by.................................................................................... Jaime Peraire, -

Multi-Scale Multi-Species Modeling for Plasma Devices
University of California Los Angeles Multi-Scale Multi-Species Modeling for Plasma Devices A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Aerospace Engineering by Samuel Jun Araki 2014 c Copyright by Samuel Jun Araki 2014 Abstract of the Dissertation Multi-Scale Multi-Species Modeling for Plasma Devices by Samuel Jun Araki Doctor of Philosophy in Aerospace Engineering University of California, Los Angeles, 2014 Professor Richard E. Wirz, Chair This dissertation describes three computational models developed to simulate important as- pects of low-temperature plasma devices, most notably ring-cusp ion discharges and thrusters. The main findings of this dissertation are related to (1) the mechanisms of cusp confinement for micro-scale plasmas, (2) the implementation and merits of magnetic field aligned meshes, and (3) an improved method for describing heavy species interactions. The Single Cusp (SC) model focuses on the near-cusp region of the discharge chamber to investigate the near surface cusp confinement of a micro-scale plasma. The model employs the multi-species iterative Monte Carlo method and uses various advanced methods such as electric field calculation and particle weighting algorithm that are compatible with a non- uniform mesh in cylindrical coordinates. Three different plasma conditions are simulated with the SC model, including an electron plasma, a sparse plasma, and a weakly ionized plasma. It is found that the scaling of plasma loss to the cusp for a sparse plasma can be similar to that for a weakly ionized plasma, while the loss mechanism is significantly different; the primary electrons strongly influence the loss structure of the sparse plasma. -

Linear Momentum and Collisions 261
CHAPTER 8 | LINEAR MOMENTUM AND COLLISIONS 261 8 LINEAR MOMENTUM AND COLLISIONS Figure 8.1 Each rugby player has great momentum, which will affect the outcome of their collisions with each other and the ground. (credit: ozzzie, Flickr) Learning Objectives 8.1. Linear Momentum and Force • Define linear momentum. • Explain the relationship between momentum and force. • State Newton’s second law of motion in terms of momentum. • Calculate momentum given mass and velocity. 8.2. Impulse • Define impulse. • Describe effects of impulses in everyday life. • Determine the average effective force using graphical representation. • Calculate average force and impulse given mass, velocity, and time. 8.3. Conservation of Momentum • Describe the principle of conservation of momentum. • Derive an expression for the conservation of momentum. • Explain conservation of momentum with examples. • Explain the principle of conservation of momentum as it relates to atomic and subatomic particles. 8.4. Elastic Collisions in One Dimension • Describe an elastic collision of two objects in one dimension. • Define internal kinetic energy. • Derive an expression for conservation of internal kinetic energy in a one dimensional collision. • Determine the final velocities in an elastic collision given masses and initial velocities. 8.5. Inelastic Collisions in One Dimension • Define inelastic collision. • Explain perfectly inelastic collision. • Apply an understanding of collisions to sports. • Determine recoil velocity and loss in kinetic energy given mass and initial velocity. 8.6. Collisions of Point Masses in Two Dimensions • Discuss two dimensional collisions as an extension of one dimensional analysis. • Define point masses. • Derive an expression for conservation of momentum along x-axis and y-axis. -

Chapter 7: Conservation of Energy with Frictional Forces Present
Lecture 12: Potential Energy; Momentum and Collisions 1 Chapter 7: Conservation of Energy with Frictional Forces Present If there are frictional forces present, then the work done against the frictional (non{conservative) forces is equal to the change (decrease) in the total Mechan- ical Energy. The total Mechanical Energy is not constant when frictional forces are present. The Mechanical Energy will decrease because of the work done against the frictional forces. Wfriction = (Kf + Uf ) (Ki + Ui) − Worked Example A 3 kg block slides down a rough incline 1 m in length. The block starts from rest at the top of the inclined plane, and experiences a constant force of friction of magnitude 5 N. The angle of the incline is 30o. Using conservation of energy, determine the speed of the block when it reaches the bottom of the plane. Wfriction = (Kf + Uf ) (Ki + Ui) − 1 fs = ( mv2 + 0) (0 + mgh) − 2 f − The force of friction f is given as 5 N, the length s over which it acts is given as 1.0 m, and the initial height of the block h may be found from simple trigonometry to be 0.5 m. 1 5 1 = 3v2 3 9:8 0:5 − · 2 f − · · 2 2 2 v = 6:47 m =s = vf = 2:54 m/s f ) In this example, the total Mechanical Energy was not conserved because of the non{conservative frictional forces. The decrease in the Mechanical Energy went into doing work against friction, and that work actually would show up as heat. Lecture 12: Potential Energy; Momentum and Collisions 2 Chapter 7: Conservation of Mechanical Energy in Spring Problems The principle of conservation of Mechanical Energy can also be applied to sys- tems involving springs. -

Hard QED Radiation at HERA
L P N H E 93-07 2 Jr Qbklgq CERN LIBRHRIES, GENE?/F1 IIIIIIIIlll|IlI| @Qiil||IIIlIIIIIII a Hard QED radiation at HERA M.W. KRASNY Laboratoire de Physique Nuciéaire Eneries et de Hautes g LPNHE - Paris N2P3 - Universités Paris Vi et VH CNRS — i4, place75252 Jussieu aris-Tour 33 - Rez-de-Chaussée PCedex 05 s F OCR Output Ta. ;ss ( 1 )44 27 6313 - FAX. as (1 )44 27 45 ss- Téigx; 202 sz OCR OutputM.C. ESCHER "Anneoux concentriques/’ fc) by SPADEM l983 OCR Output OCR OutputHard QED radiation at HERA l\/[.W. Krasny L.P.N.H.E IN2P3-CNRS, Universities Paris VI et VII 4, pl. Jussieu, T33 PtdC 75252 Paris Cedex 05, France and High Energy Physics Lab., Institute of Nuclear Physics,Pl-BOO55 Cracow, Poland Abstract: The deep inelastic electron—proton collisions at HERA are fre quently associated with emissions of hard photons. A large fraction of these events can be identified either by the direct detection of radiative photons, or, indirectly, by a mismatch between the event kinematics determined from the scattered electron energy and its angle and that determined from the hadronic flow associated with a deep inelastic scattering. This unique feature of HERA experiments provides an experimental check on the size of radiative correc tions. The emission of photons collinear with the incident electrons leads to a reduction of the effective beam energy. This effect can be used to measure the longitudinal structure function. Invited Talk presented at the Durham Workshop "HERA the new frontier for QCD, Durham, UK, March l993" OCR Output 1 Introduction At HERA the cross section for radiative scattering : ep —> e + 7 + X is large [1] and, especially at small x, can be of the same order of magnitude as the nonradiative cross section.