Design and Implementation of an Omni-Directional Underwater Acoustic Micro-Modem Based on a Low-Power Micro-Controller Unit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MC14SM5567 PCM Codec-Filter
Product Preview Freescale Semiconductor, Inc. MC14SM5567/D Rev. 0, 4/2002 MC14SM5567 PCM Codec-Filter The MC14SM5567 is a per channel PCM Codec-Filter, designed to operate in both synchronous and asynchronous applications. This device 20 performs the voice digitization and reconstruction as well as the band 1 limiting and smoothing required for (A-Law) PCM systems. DW SUFFIX This device has an input operational amplifier whose output is the input SOG PACKAGE CASE 751D to the encoder section. The encoder section immediately low-pass filters the analog signal with an RC filter to eliminate very-high-frequency noise from being modulated down to the pass band by the switched capacitor filter. From the active R-C filter, the analog signal is converted to a differential signal. From this point, all analog signal processing is done differentially. This allows processing of an analog signal that is twice the amplitude allowed by a single-ended design, which reduces the significance of noise to both the inverted and non-inverted signal paths. Another advantage of this differential design is that noise injected via the power supplies is a common mode signal that is cancelled when the inverted and non-inverted signals are recombined. This dramatically improves the power supply rejection ratio. After the differential converter, a differential switched capacitor filter band passes the analog signal from 200 Hz to 3400 Hz before the signal is digitized by the differential compressing A/D converter. The decoder accepts PCM data and expands it using a differential D/A converter. The output of the D/A is low-pass filtered at 3400 Hz and sinX/X compensated by a differential switched capacitor filter. -

Telecommunications Technology Transfers Contents
CHAPTER 6 Telecommunications Technology Transfers Contents Page INTRODUCTION . 185 TELECOMMUNICATIONS IN THE MIDDLE EAST . 186 Telecommunications Systems . 186 Manpower Requirements . 190 Telecommunications Systems in the Middle East. ........: . 191 Perspectives of Recipient Countries and Firms . 211 Perspectives of Supplier Countries and Firms . 227 IMPLICATIONS FOR U.S. POLICY . 236 CONCLUSIONS . 237 APPENDIX 6A. – TELECOMMUNICATIONS PROJECT PROFILES IN SELECTED MIDDLE EASTERN COUNTRIES. 238 Saudi Arabian Project Descriptions . 238 Egyptian Project Descriptions . 240 Algerian Project Description . 242 Iranian Project Description . 242 Tables Table No. Page 51. Market Shares of Telecommunications Equipment Exports to Saudi Arabia From OECD Countries, 1971, 1975-80 . 194 52. Selected Telecommunications Contracts in Saudi Arabia . 194 53. Market Shares of Telecommunications Equipment Exports to Kuwait From OECD Countries, 1971,1975-80 . 198 54. Selected Telecommunications Contracts in Kuwait . 198 55. Market Shares of Telecommunications Equipment Exports From OECD Countries, 1971, 1975-80 . 202 56. Market Shares of Telecommunications Equipment Exports to Algeria From OECD Countries, 1971,1975-80 . 204 57. Market Shares of Telecommunications Equipment Exports to Iraq From OECD Countries, 1971, 1975-80 . 206 58. Selected Telecommunications Contracts in Iraq . 206 59. Market Shares of Telecommunications Equipment Exports to Iran From OECD Countries, 1971, 1975-80 . 208 60. Saudi Arabian Telecommunications Budgets As Compared to Total Budgets . 212 61. U.S. Competitive Position in Telecommunications Markets in the Middle East Between 1974 and 1982 . 233 Figures Page l0. Apparent Telecommunications Sector Breakdowns-Saudi Arabia, 1974-82 . 195 11. Apparent Market Share, Saudi Arabia, 1974-82 . 196 12. Apparent Sector Breakdowns-Kuwait, 1974-82 . 197 13. Apparent Market Share-Kuwait, 1974-82 . -
UNIT: 3 Digital and Analog Transmission
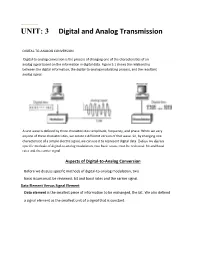
UNIT: 3 Digital and Analog Transmission DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Figure 5.1 shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. When we vary anyone of these characteristics, we create a different version of that wave. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Aspects of Digital-to-Analog Conversion Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Data Element Versus Signal Element Data element is the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Data Rate Versus Signal Rate We can define the data rate (bit rate) and the signal rate (baud rate). The relationship between them is S= N/r baud where N is the data rate (bps) and r is the number of data elements carried in one signal element. The value of r in analog transmission is r =log2 L, where L is the type of signal element, not the level. Carrier Signal In analog transmission, the sending device produces a high-frequency signal that acts as a base for the information signal. -

Broadcasters Respond to the Challenges of HDTV and Digital Transmission
Emerging Trends: Broadcasters Respond to the Challenges of HDTV and Digital Transmission Communications Federal, state and local rules typically lag behind, sometimes far behind, new developments in technology. Such is the case with advancements in television broadcasting, such as High Definition Television (HDTV). Earlier Clifford M. Harrington this month, the National Association of Broadcasters unveiled two basic 202.663.8525 digital converter prototypes that will make it possible for the approximately [email protected] 20 million American consumers who don’t own or can’t afford to buy HDTV-compatible systems to still receive an HDTV signal when all network, cable and local stations switch over from analog to digital on February 17, 2009. These prototypes will be rolled out in electronics and department stores in January, at an expected cost of about $50 to $70. In the following Q&A, Clifford M. Harrington, who heads the Communications Practice at Pillsbury Winthrop Shaw Pittman, discusses how new federal laws enacted by the Federal Communications Commission (FCC) related to HDTV are affecting virtually every consumer, as well as redefining the television industry. Q: What’s happening in the world of television technology? Harrington: Anyone who walks into a consumer electronics showroom has seen the public face of HDTV: high resolution digital images on often enormous flat screens. But HDTV is just one benefit of the new digital transmission system that is being adopted by the American television industry. Digital television will also permit multicasting—the simultaneous broadcast by a single station of several Standard Definition program streams of equal or better quality than current television signals. -

Digital Transmission of Analog Signals
The Communications Edge™ Tech-note Author: John F. Delozier Digital Transmission of Analog Signals The digital transmission of analog information ment that is similar to the improvement is an old idea which has always had a certain V found when wideband FM systems are com- amount of appeal to telecommunication sys- τ pared to AM systems. (a) tem designers. If a minimum level of signal- T to-noise ratio is maintained, then it is possible DIGITAL PULSE MODULATION to operate a digital transmission system (b) Pulse code modulation (PCM) and delta almost error free. modulation (DM) are the major digital pulse It is the intent of this article to provide a brief formats. Digital pulse modulation is charac- tutorial on digital telecommunications for terized by the representation of the informa- personnel not already familiar with this sub- (c) tion signal as a discrete value in a finite set of ject. As background material, some modula- values. Pulse code modulation begins with a tion and multiplexing techniques will be cov- sampled information signal (PAM) whose sample amplitudes are quantized and encoded ered initially. The focus of the article will be a (d) UNMODULATED presentation of the two major telecommuni- PULSES into a finite number of bits or into an n-bit cation hierarchies found in today’s networks word. The implementation of PCM is more complicated than analog pulse modulation and then digital transmission via microwave (e) formats, but PCM’s transmission and regener- modulation techniques will be briefly covered. Figure 1. Pulse modulation format. The carrier pulse train ation capabilities are more attractive. -

Digital Television: an Overview
Order Code RL31260 CRS Report for Congress Received through the CRS Web Digital Television: An Overview Updated June 22, 2005 Lennard G. Kruger Specialist in Science and Technology Resources, Science, and Industry Division Congressional Research Service ˜ The Library of Congress Digital Television: An Overview Summary Digital television (DTV) is a new television service representing the most significant development in television technology since the advent of color television in the 1950s. DTV can provide sharper pictures, a wider screen, CD-quality sound, better color rendition, and other new services currently being developed. The nationwide deployment of digital television is a complex and multifaceted enterprise. A successful deployment requires: the development by content providers of compelling digital programming; the delivery of digital signals to consumers by broadcast television stations, as well as cable and satellite television systems; and the widespread purchase and adoption by consumers of digital television equipment. The Telecommunications Act of 1996 (P.L. 104-104) provided that initial eligibility for any DTV licenses issued by the Federal Communications Commission (FCC) should be limited to existing broadcasters. Because DTV signals cannot be received through the existing analog television broadcasting system, the FCC decided to phase in DTV over a period of years, so that consumers would not have to immediately purchase new digital television sets or converters. Thus, broadcasters were given new spectrum for digital signals, while retaining their existing spectrum for analog transmission so that they can simultaneously transmit analog and digital signals to their broadcasting market areas. Congress and the FCC set a target date of December 31, 2006 for broadcasters to cease broadcasting their analog signals and return their existing analog television spectrum to be auctioned for commercial services (such as broadband) or used for public safety communications. -

Chapter 5 Analog Transmission
Chapter 5 Analog Transmission 5.1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 5-1 DIGITAL-TO-ANALOG CONVERSION Digital--tto--analoanalog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data.. Topics discussed in this section: Aspects of Digital-to-Analog Conversion Amplitude Shift Keying Frequency Shift Keying Phase Shift Keying Quadrature Amplitude Modulation 5.2 Figure 5.1 Digital-to-analog conversion Digital-to-analog modulation (or shift keying): changing one of the characteristics of the analog signal …… based on the information of the digital signal (carrying digital information onto analog signals) Changing any of the characteristics of the simple signal (amplitude, frequency, or phase) would change the nature of the signal to become a composite signal 5.3 Figure 5.2 Types of digital-to-analog conversion 5.4 Asppgects of Digital-to-Analog Conversion Data Element vs. Signal Element Data Rate vs. Signal Rate S = N/r r=logr = log2 L, where L is the number of signal elements Bandwidth: The required bandwidth for analog transmission of digital data is proportional to the signal rate Carrier Signal: The digital data changes the carrier signal by modifying one of its characteristics This is called modulation (or Shift Keying) The receiver is tuned to the carrier signal’s frequency 5.5 Note Bit rate is the number of bits per second. Baud rate is the number of signal elements per second . In the analog transmission of digital data, the baud rate is less than or equal to the bit rate. -

Analog Transmission 5.1 DIGITAL-TO-ANALOG CONVERSION
College of information Technology Department of Information Networks Telecommunication & Networking I Chapter 5 Analog Transmission 5.1 DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. The Figure shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Any of the three characteristics can be altered in this way, giving us at least three mechanisms for modulating digital data into an analog signal: amplitude shift keying (ASK), frequency shift keying (FSK), and phase shift keying (PSK). In addition, there is a fourth (and better) mechanism that combines changing both the amplitude and phase, called quadrature amplitude modulation (QAM). QAM is the most efficient of these options and is the mechanism commonly used today (see the figure). 5.1.1 Aspects of Digital-to-Analog Conversion Data Element Versus Signal Element We discussed the concept of the data element versus the signal element. We defined a data element as the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Although we continue to use the same terms in this chapter, we will see that the nature of the signal element is a little bit different in analog transmission. -

Week 7 Analog Transmission Susmini I. Lestariningati, MT
Data Communication Week 7 Analog Transmission 7 Susmini I. Lestariningati, M.T Data Communication @lestariningati Analog Transmission • In chapter 3, we discussed the advantages and disadvantage of digital and analog transmission. We saw that while digital transmission is very desirable, a low-pass channel is needed. We also saw that analog transmission is the only choice if we have a bandpass channel. Digital transmission was discussed in Chapter 4; we discuss analog transmission in this chapter. • Converting digital data to a bandpass analog signal is traditionally called digital-to-analog conversion. Converting a low-pass analog signal to a bandpass analog signal is traditionally called analog-to-analog conversion. • In this chapter, we discuss these two types of conversions. • Digital to Analog Conversion • Analog to Analog Conversion Computer Engineering 2 Data Communication @lestariningati Digital to Analog Conversion • Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Computer Engineering 3 Data Communication @lestariningati Types of Digital to Analog Conversion Computer Engineering 4 Data Communication @lestariningati Aspects of Digital to Analog Conversion • Data Element vs Signal Element • Data Element is a smallest piece of information to be exchanged, the bit • Signal Element is the smallest unit of a signal that is constant. • Data Rate vs Signal Rate • Bit rate is the number of bits per second. • Baud Rate is the number of signal element per second. • In the analog transmission of digital data, the baud rate is less than or equal to the bit rate. • Relationship between Data Rate and Signal Rate: Computer Engineering 5 Data Communication @lestariningati Examples • An analog signal carries 4 bits per signal element. -

Analog Transmission Introduction
Analog Transmission Introduction When data in either digital or analog forms needs to be sent over an analog media it must first be converted into analog signals. There can be two cases according to data formatting. Bandpass: In real world scenarios, filters are used to filter and pass frequencies of interest. A bandpass is a band of frequencies which can pass the filter. Low-pass: Low-pass is a filter that passes low frequencies signals. When digital data is converted into a bandpass analog signal, it is called digital-to-analog conversion. When low-pass analog signal is converted into bandpass analog signal it is called analog-to-analog conversion. Digital-to-Analog Conversion When data from one computer is sent to another via some analog carrier, it is first converted into analog signals. Analog signals are modified to reflect digital data, i.e. binary data. An analog is characterized by its amplitude, frequency and phase. There are three kinds of digital-to-analog conversions possible: AMPLITUDE SHIFT KEYING In this conversion technique, the amplitude of analog carrier signal is modified to reflect binary data. [Image: Amplitude Shift Keying] When binary data represents digit 1, the amplitude is held otherwise it is set to 0. Both frequency and phase remain same as in the original carrier signal. FREQUENCY SHIFT KEYING In this conversion technique, the frequency of the analog carrier signal is modified to reflect binary data. [Image: Frequency shift keying] This technique uses two frequencies, f1 and f2. One of them, for example f1, is chosen to represent binary digit 1 and the other one is used to represent binary digit 0. -
Analog Transmission of Analog Data: AM and FM
1 AnalogAnalog TransmissionTransmission ofof AnalogAnalog Data:Data: AMAM andand FMFM Required reading: - CSE 3213, Fall 2010 Instructor: N. Vlajic Modulation of Analog Data 2 Why Analog-to-Analog – two principal reasons for combining an Modulation? an analog signal with a carrier at freq. fc: (1) higher freq. may be needed for effective transmission • in wireless domain, it is virtually impossible to transmit baseband signals – the required antennas would be many kilometres in diameter (2) modulation permits FDM (freq. division multiplexing) more on this later … • example: radio analog signals produced by radio stations are low-pass, all in the same range - to be able to listen to different stations, the low-pass signals need to be shifted, each to a different range FDM in time-domain FDM in frequency-domain Modulation of Analog Data (cont.) 3 Types of Analog-to-Analog Modulation Amplitude Modulation 4 Amplitude – amplitude of the carrier signal varies with the Modulation changing amplitude of input/modulating signal; frequency and phase remain unchanged s(t) = [A c + x(t)]⋅cos(2πfc t) = A c ⋅[1+ kax(t)]⋅cos(2πfc t) • Ac – carrier amplitude • ka – amplitude sensitivity of the modulator, must be: kax(t) < 1 to ensure that the function [1+kax(t)] is always positive otherwise the envelope will cross the time axis, and info. will be lost http://cnyack.homestead.com/files/modulation/modam.htm Amplitude Modulation (cont.) 5 AM Bandwidth – bandwidth of an AM signal = 2x bandwidth of modulating signal, and covers a range centered on carrier -

Gsm to Imt-2000 - a Comparative Analysis
3G MOBILE LICENSING POLICY: FROM GSM TO IMT-2000 - A COMPARATIVE ANALYSIS GSM Case Study This case has been prepared by Audrey Selian <[email protected]>, ITU. 3G Mobile Licensing Policy: GSM Case Study is part of a series of Telecommunication Case Studies produced under the New Initiatives program of the Office of the Secretary General of the International Telecommunication Union (ITU). The author wishes to acknowledge the valuable guidance and direction of Tim Kelly and Fabio Leite of the ITU in the development of this study. The 3G case studies program is managed by Lara Srivastava <[email protected]> and under the direction of Ben Petrazzini <[email protected]>. Country case studies on 3G, including Sweden, Japan, China & Hong Kong SAR, Chile, Venezuela, and Ghana can be found at <http://www.itu.int/3g>. The opinions expressed in this study are those of the author and do not necessarily reflect the views of the International Telecommunication Union, its membership or the GSM Association. 2 GSM Case Study TABLE OF CONTENTS: 1 Introduction................................................................................................................................................ 6 1.1 The Generations of Mobile Networks................................................................................................ 7 2 A Look Back at GSM .............................................................................................................................. 10 2.1 GSM Technology............................................................................................................................