Approximation Atkinson Chapter 4, Dahlquist & Bjork Section 4.5
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Short Course on Approximation Theory
A Short Course on Approximation Theory N. L. Carothers Department of Mathematics and Statistics Bowling Green State University ii Preface These are notes for a topics course offered at Bowling Green State University on a variety of occasions. The course is typically offered during a somewhat abbreviated six week summer session and, consequently, there is a bit less material here than might be associated with a full semester course offered during the academic year. On the other hand, I have tried to make the notes self-contained by adding a number of short appendices and these might well be used to augment the course. The course title, approximation theory, covers a great deal of mathematical territory. In the present context, the focus is primarily on the approximation of real-valued continuous functions by some simpler class of functions, such as algebraic or trigonometric polynomials. Such issues have attracted the attention of thousands of mathematicians for at least two centuries now. We will have occasion to discuss both venerable and contemporary results, whose origins range anywhere from the dawn of time to the day before yesterday. This easily explains my interest in the subject. For me, reading these notes is like leafing through the family photo album: There are old friends, fondly remembered, fresh new faces, not yet familiar, and enough easily recognizable faces to make me feel right at home. The problems we will encounter are easy to state and easy to understand, and yet their solutions should prove intriguing to virtually anyone interested in mathematics. The techniques involved in these solutions entail nearly every topic covered in the standard undergraduate curriculum. -

Chebyshev Polynomials of the Second, Third and Fourth Kinds in Approximation, Indefinite Integration, and Integral Transforms *
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Journal of Computational and Applied Mathematics 49 (1993) 169-178 169 North-Holland CAM 1429 Chebyshev polynomials of the second, third and fourth kinds in approximation, indefinite integration, and integral transforms * J.C. Mason Applied and Computational Mathematics Group, Royal Military College of Science, Shrivenham, Swindon, Wiltshire, United Kingdom Dedicated to Dr. D.F. Mayers on the occasion of his 60th birthday Received 18 February 1992 Revised 31 March 1992 Abstract Mason, J.C., Chebyshev polynomials of the second, third and fourth kinds in approximation, indefinite integration, and integral transforms, Journal of Computational and Applied Mathematics 49 (1993) 169-178. Chebyshev polynomials of the third and fourth kinds, orthogonal with respect to (l+ x)‘/‘(l- x)-‘I* and (l- x)‘/*(l+ x)-‘/~, respectively, on [ - 1, 11, are less well known than traditional first- and second-kind polynomials. We therefore summarise basic properties of all four polynomials, and then show how some well-known properties of first-kind polynomials extend to cover second-, third- and fourth-kind polynomials. Specifically, we summarise a recent set of first-, second-, third- and fourth-kind results for near-minimax constrained approximation by series and interpolation criteria, then we give new uniform convergence results for the indefinite integration of functions weighted by (1 + x)-i/* or (1 - x)-l/* using third- or fourth-kind polynomial expansions, and finally we establish a set of logarithmically singular integral transforms for which weighted first-, second-, third- and fourth-kind polynomials are eigenfunctions. -

Generalizations of Chebyshev Polynomials and Polynomial Mappings
TRANSACTIONS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 359, Number 10, October 2007, Pages 4787–4828 S 0002-9947(07)04022-6 Article electronically published on May 17, 2007 GENERALIZATIONS OF CHEBYSHEV POLYNOMIALS AND POLYNOMIAL MAPPINGS YANG CHEN, JAMES GRIFFIN, AND MOURAD E.H. ISMAIL Abstract. In this paper we show how polynomial mappings of degree K from a union of disjoint intervals onto [−1, 1] generate a countable number of spe- cial cases of generalizations of Chebyshev polynomials. We also derive a new expression for these generalized Chebyshev polynomials for any genus g, from which the coefficients of xn can be found explicitly in terms of the branch points and the recurrence coefficients. We find that this representation is use- ful for specializing to polynomial mapping cases for small K where we will have explicit expressions for the recurrence coefficients in terms of the branch points. We study in detail certain special cases of the polynomials for small degree mappings and prove a theorem concerning the location of the zeroes of the polynomials. We also derive an explicit expression for the discrimi- nant for the genus 1 case of our Chebyshev polynomials that is valid for any configuration of the branch point. 1. Introduction and preliminaries Akhiezer [2], [1] and, Akhiezer and Tomˇcuk [3] introduced orthogonal polynomi- als on two intervals which generalize the Chebyshev polynomials. He observed that the study of properties of these polynomials requires the use of elliptic functions. In thecaseofmorethantwointervals,Tomˇcuk [17], investigated their Bernstein-Szeg˝o asymptotics, with the theory of Hyperelliptic integrals, and found expressions in terms of a certain Abelian integral of the third kind. -

Chebyshev and Fourier Spectral Methods 2000
Chebyshev and Fourier Spectral Methods Second Edition John P. Boyd University of Michigan Ann Arbor, Michigan 48109-2143 email: [email protected] http://www-personal.engin.umich.edu/jpboyd/ 2000 DOVER Publications, Inc. 31 East 2nd Street Mineola, New York 11501 1 Dedication To Marilyn, Ian, and Emma “A computation is a temptation that should be resisted as long as possible.” — J. P. Boyd, paraphrasing T. S. Eliot i Contents PREFACE x Acknowledgments xiv Errata and Extended-Bibliography xvi 1 Introduction 1 1.1 Series expansions .................................. 1 1.2 First Example .................................... 2 1.3 Comparison with finite element methods .................... 4 1.4 Comparisons with Finite Differences ....................... 6 1.5 Parallel Computers ................................. 9 1.6 Choice of basis functions .............................. 9 1.7 Boundary conditions ................................ 10 1.8 Non-Interpolating and Pseudospectral ...................... 12 1.9 Nonlinearity ..................................... 13 1.10 Time-dependent problems ............................. 15 1.11 FAQ: Frequently Asked Questions ........................ 16 1.12 The Chrysalis .................................... 17 2 Chebyshev & Fourier Series 19 2.1 Introduction ..................................... 19 2.2 Fourier series .................................... 20 2.3 Orders of Convergence ............................... 25 2.4 Convergence Order ................................. 27 2.5 Assumption of Equal Errors ........................... -

Dymore User's Manual Chebyshev Polynomials
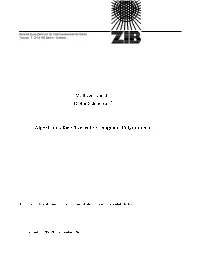
Dymore User's Manual Chebyshev polynomials Olivier A. Bauchau August 27, 2019 Contents 1 Definition 1 1.1 Zeros and extrema....................................2 1.2 Orthogonality relationships................................3 1.3 Derivatives of Chebyshev polynomials..........................5 1.4 Integral of Chebyshev polynomials............................5 1.5 Products of Chebyshev polynomials...........................5 2 Chebyshev approximation of functions of a single variable6 2.1 Expansion of a function in Chebyshev polynomials...................6 2.2 Evaluation of Chebyshev expansions: Clenshaw's recurrence.............7 2.3 Derivatives and integrals of Chebyshev expansions...................7 2.4 Products of Chebyshev expansions...........................8 2.5 Examples.........................................9 2.6 Clenshaw-Curtis quadrature............................... 10 3 Chebyshev approximation of functions of two variables 12 3.1 Expansion of a function in Chebyshev polynomials................... 12 3.2 Evaluation of Chebyshev expansions: Clenshaw's recurrence............. 13 3.3 Derivatives of Chebyshev expansions.......................... 14 4 Chebychev polynomials 15 4.1 Examples......................................... 16 1 Definition Chebyshev polynomials [1,2] form a series of orthogonal polynomials, which play an important role in the theory of approximation. The lowest polynomials are 2 3 4 2 T0(x) = 1;T1(x) = x; T2(x) = 2x − 1;T3(x) = 4x − 3x; T4(x) = 8x − 8x + 1;::: (1) 1 and are depicted in fig.1. The polynomials can be generated from the following recurrence rela- tionship Tn+1 = 2xTn − Tn−1; n ≥ 1: (2) 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 CHEBYSHEV POLYNOMIALS −0.6 −0.8 −1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 XX Figure 1: The seven lowest order Chebyshev polynomials It is possible to give an explicit expression of Chebyshev polynomials as Tn(x) = cos(n arccos x): (3) This equation can be verified by using elementary trigonometric identities. -

February 2009
How Euler Did It by Ed Sandifer Estimating π February 2009 On Friday, June 7, 1779, Leonhard Euler sent a paper [E705] to the regular twice-weekly meeting of the St. Petersburg Academy. Euler, blind and disillusioned with the corruption of Domaschneff, the President of the Academy, seldom attended the meetings himself, so he sent one of his assistants, Nicolas Fuss, to read the paper to the ten members of the Academy who attended the meeting. The paper bore the cumbersome title "Investigatio quarundam serierum quae ad rationem peripheriae circuli ad diametrum vero proxime definiendam maxime sunt accommodatae" (Investigation of certain series which are designed to approximate the true ratio of the circumference of a circle to its diameter very closely." Up to this point, Euler had shown relatively little interest in the value of π, though he had standardized its notation, using the symbol π to denote the ratio of a circumference to a diameter consistently since 1736, and he found π in a great many places outside circles. In a paper he wrote in 1737, [E74] Euler surveyed the history of calculating the value of π. He mentioned Archimedes, Machin, de Lagny, Leibniz and Sharp. The main result in E74 was to discover a number of arctangent identities along the lines of ! 1 1 1 = 4 arctan " arctan + arctan 4 5 70 99 and to propose using the Taylor series expansion for the arctangent function, which converges fairly rapidly for small values, to approximate π. Euler also spent some time in that paper finding ways to approximate the logarithms of trigonometric functions, important at the time in navigation tables. -

Function Approximation Through an Efficient Neural Networks Method
Paper ID #25637 Function Approximation through an Efficient Neural Networks Method Dr. Chaomin Luo, Mississippi State University Dr. Chaomin Luo received his Ph.D. in Department of Electrical and Computer Engineering at Univer- sity of Waterloo, in 2008, his M.Sc. in Engineering Systems and Computing at University of Guelph, Canada, and his B.Eng. in Electrical Engineering from Southeast University, Nanjing, China. He is cur- rently Associate Professor in the Department of Electrical and Computer Engineering, at the Mississippi State University (MSU). He was panelist in the Department of Defense, USA, 2015-2016, 2016-2017 NDSEG Fellowship program and panelist in 2017 NSF GRFP Panelist program. He was the General Co-Chair of 2015 IEEE International Workshop on Computational Intelligence in Smart Technologies, and Journal Special Issues Chair, IEEE 2016 International Conference on Smart Technologies, Cleveland, OH. Currently, he is Associate Editor of International Journal of Robotics and Automation, and Interna- tional Journal of Swarm Intelligence Research. He was the Publicity Chair in 2011 IEEE International Conference on Automation and Logistics. He was on the Conference Committee in 2012 International Conference on Information and Automation and International Symposium on Biomedical Engineering and Publicity Chair in 2012 IEEE International Conference on Automation and Logistics. He was a Chair of IEEE SEM - Computational Intelligence Chapter; a Vice Chair of IEEE SEM- Robotics and Automa- tion and Chair of Education Committee of IEEE SEM. He has extensively published in reputed journal and conference proceedings, such as IEEE Transactions on Neural Networks, IEEE Transactions on SMC, IEEE-ICRA, and IEEE-IROS, etc. His research interests include engineering education, computational intelligence, intelligent systems and control, robotics and autonomous systems, and applied artificial in- telligence and machine learning for autonomous systems. -

8.3 - Chebyshev Polynomials
8.3 - Chebyshev Polynomials 8.3 - Chebyshev Polynomials Chebyshev polynomials Definition Chebyshev polynomial of degree n ≥= 0 is defined as Tn(x) = cos (n arccos x) ; x 2 [−1; 1]; or, in a more instructive form, Tn(x) = cos nθ ; x = cos θ ; θ 2 [0; π] : Recursive relation of Chebyshev polynomials T0(x) = 1 ;T1(x) = x ; Tn+1(x) = 2xTn(x) − Tn−1(x) ; n ≥ 1 : Thus 2 3 4 2 T2(x) = 2x − 1 ;T3(x) = 4x − 3x ; T4(x) = 8x − 8x + 1 ··· n−1 Tn(x) is a polynomial of degree n with leading coefficient 2 for n ≥ 1. 8.3 - Chebyshev Polynomials Orthogonality Chebyshev polynomials are orthogonal w.r.t. weight function w(x) = p 1 . 1−x2 Namely, Z 1 T (x)T (x) 0 if m 6= n np m dx = (1) 2 π −1 1 − x 2 if n = m for each n ≥ 1 Theorem (Roots of Chebyshev polynomials) The roots of Tn(x) of degree n ≥ 1 has n simple zeros in [−1; 1] at 2k−1 x¯k = cos 2n π ; for each k = 1; 2 ··· n : Moreover, Tn(x) assumes its absolute extrema at 0 kπ 0 k x¯k = cos n ; with Tn(¯xk) = (−1) ; for each k = 0; 1; ··· n : 0 −1 k For k = 0; ··· n, Tn(¯xk) = cos n cos (cos(kπ=n)) = cos(kπ) = (−1) : 8.3 - Chebyshev Polynomials Definition A monic polynomial is a polynomial with leading coefficient 1. The monic Chebyshev polynomial T~n(x) is defined by dividing Tn(x) by 2n−1; n ≥ 1. -
Algorithms for Classical Orthogonal Polynomials
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustr. 7, D-14195 Berlin - Dahlem Wolfram Ko epf Dieter Schmersau Algorithms for Classical Orthogonal Polynomials at Berlin Fachb ereich Mathematik und Informatik der Freien Universit Preprint SC Septemb er Algorithms for Classical Orthogonal Polynomials Wolfram Ko epf Dieter Schmersau koepfzibde Abstract In this article explicit formulas for the recurrence equation p x A x B p x C p x n+1 n n n n n1 and the derivative rules 0 x p x p x p x p x n n+1 n n n n1 n and 0 p x p x x p x x n n n n1 n n resp ectively which are valid for the orthogonal p olynomial solutions p x of the dierential n equation 00 0 x y x x y x y x n of hyp ergeometric typ e are develop ed that dep end only on the co ecients x and x which themselves are p olynomials wrt x of degrees not larger than and resp ectively Partial solutions of this problem had b een previously published by Tricomi and recently by Yanez Dehesa and Nikiforov Our formulas yield an algorithm with which it can b e decided whether a given holonomic recur rence equation ie one with p olynomial co ecients generates a family of classical orthogonal p olynomials and returns the corresp onding data density function interval including the stan dardization data in the armative case In a similar way explicit formulas for the co ecients of the recurrence equation and the dierence rule x rp x p x p x p x n n n+1 n n n n1 of the classical orthogonal p olynomials of a discrete variable are given that dep end only -

A Rational Approximation to the Logarithm
A Rational Approximation to the Logarithm By R. P. Kelisky and T. J. Rivlin We shall use the r-method of Lanczos to obtain rational approximations to the logarithm which converge in the entire complex plane slit along the nonpositive real axis, uniformly in certain closed regions in the slit plane. We also provide error esti- mates valid in these regions. 1. Suppose z is a complex number, and s(l, z) denotes the closed line segment joining 1 and z. Let y be a positive real number, y ¿¿ 1. As a polynomial approxima- tion, of degree n, to log x on s(l, y) we propose p* G Pn, Pn being the set of poly- nomials with real coefficients of degree at most n, which minimizes ||xp'(x) — X|J===== max \xp'(x) — 1\ *e«(l.v) among all p G Pn which satisfy p(l) = 0. (This procedure is suggested by the observation that w = log x satisfies xto'(x) — 1=0, to(l) = 0.) We determine p* as follows. Suppose p(x) = a0 + aix + ■• • + a„xn, p(l) = 0 and (1) xp'(x) - 1 = x(x) = b0 + bix +-h bnxn . Then (2) 6o = -1 , (3) a,- = bj/j, j = 1, ■•-,«, and n (4) a0= - E Oj • .-i Thus, minimizing \\xp' — 1|| subject to p(l) = 0 is equivalent to minimizing ||«-|| among all i£P„ which satisfy —ir(0) = 1. This, in turn, is equivalent to maximiz- ing |7r(0) I among all v G Pn which satisfy ||ir|| = 1, in the sense that if vo maximizes |7r(0)[ subject to ||x|| = 1, then** = —iro/-7ro(0) minimizes ||x|| subject to —ir(0) = 1. -

Polynomial Interpolation and Chebyshev Polynomials
Lecture 7: Polynomial interpolation and Chebyshev polynomials Michael S. Floater September 30, 2018 These notes are based on Section 3.1 of the book. 1 Lagrange interpolation Interpolation describes the problem of finding a function that passes through a given set of values f0,f1,...,fn at data points x0,x1,...,xn. Such a function is called an interpolant. If p is an interpolant then p(xi) = fi, i = 0, 1,...,n. Let us suppose that the points and values are in R. If the values fi are samples f(xi) from some real function f then p approximates f. One choice of p is a polynomial of degree at most n. Using the Lagrange basis functions n x − xj Lk(x)= , k =0, 1,...,n, xk − xj Yj=0 j=6 k we can express p explicitly as n p(x)= fkLk(x). Xk=0 Because Lk(xi) = 0 when i =6 k and Lk(xk) = 1, it is easy to check that p(xi) = fi for i = 0, 1,...,n. The interpolant p is also unique among all polynomial interpolants of degree ≤ n. This is because if q is another such interpolant, the difference r = p − q would be a polynomial of degree ≤ n 1 such that r(xi)=0for i =0, 1,...,n. Thus r would have at least n +1 zeros and by a result from algebra this would imply that r = 0. For this kind of interpolation there is an error formula. n+1 Theorem 1 Suppose f ∈ C [a,b] and let fi = f(xi), i =0, 1,...,n, where x0,x1,...,xn are distinct points in [a,b]. -

Topics in High-Dimensional Approximation Theory
TOPICS IN HIGH-DIMENSIONAL APPROXIMATION THEORY DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of the Ohio State University By Yeonjong Shin Graduate Program in Mathematics The Ohio State University 2018 Dissertation Committee: Dongbin Xiu, Advisor Ching-Shan Chou Chuan Xue c Copyright by Yeonjong Shin 2018 ABSTRACT Several topics in high-dimensional approximation theory are discussed. The fundamental problem in approximation theory is to approximate an unknown function, called the target function by using its data/samples/observations. Depending on different scenarios on the data collection, different approximation techniques need to be sought in order to utilize the data properly. This dissertation is concerned with four different approximation methods in four different scenarios in data. First, suppose the data collecting procedure is resource intensive, which may require expensive numerical simulations or experiments. As the performance of the approximation highly depends on the data set, one needs to carefully decide where to collect data. We thus developed a method of designing a quasi-optimal point set which guides us where to collect the data, before the actual data collection procedure. We showed that the resulting quasi-optimal set notably outperforms than other standard choices. Second, it is not always the case that we obtain the exact data. Suppose the data is corrupted by unexpected external errors. These unexpected corruption errors can have big magnitude and in most cases are non-random. We proved that a well-known classical method, the least absolute deviation (LAD), could effectively eliminate the corruption er- rors.