RHODES – ITMS – MILOS: Ramp Metering System Test
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Primal Greece : Between Dream and Archaeology
The primal Greece : between dream and archaeology Introduction The Aegean civilisations in the French National Archaeological Museum « This unusual form […] reveals an unknown Greece within Greece […] as solemn, profound and colossal as the other is radiant, light and considered; […] all here meets the reputation of the Atrids and brings back the horror of the Achaean fables », wrote on 1830 in front of the walls of Mycenae, the traveller Edgard Quinet, who was passionate about Greek tragedies. Like other travellers before him, he was aware of approaching the memory of an unknown past, of a primal Greece, but he would never have believed that this Greece dated from prehistoric times. It will be the end of the 19th century before the pioneers of archaeology reveal to the world the first civilisations of the Aegean. The « Museum of National Antiquities» played then a key role, spreading the knowledge about these fabulous finds. Here, as well as in the Louvre, the public has been able to meet the Aegean civilisations. The Comparative Archaeology department had a big display case entirely dedicated to them. The exhibition invites visitors back to this era of endless possibilities in order to experience this great archaeological adventure. Birth of a state, birth of an archaeology As soon as it becomes independent (1832), Greece is concerned with preserving its antiquities and creates an Archaeological Service (1834). Shortly afterwards, Ephemeris Archaiologike, the first Greek archaeological review, is founded, at the same time as the Archaeological Society at Athens. The French School at Athens is founded in 1846 in order to promote the study of antiquities, and is followed by a German study Institute in 1874; many other countries will follow the example of France and Germany. -

Cyclades - Greece 7 Days Charter Itinerary Cyclades - Greece 2
Cyclades - Greece 7 days Charter Itinerary Cyclades - Greece 2 Tessaly Evia GREECE TURKEY North Aegean Attica Andros Piraeus Aegina Kea Tinos Poros Mykonos Kythnos Syros Delos Peloponnese Hydra Spetses Seriphos Aegean Sea Paros Naxos Sifnos Milos Schinoussa Kos Ios Santorini Cyclades - Greece 3 Ports and distances Day Ports Distance in n.m. 1 Athens-Kea 49 2 Kea-Tinos-Mykonos 63 3 Mykonos-Delos-Paros 32 4 Paros-Ios-Santorini 73 5 Santorini-Milos 51 6 Milos-Sifnos 29 7 Sifnos-Seriphos-Kythnos 45 8 Kythnos-Piraeus 53 Total distance - 395 n.m. Cyclades - Greece 4 Athens Te Capital of Greece. Within the sprawling city of Athens it is easy to imagine the golden age of Greece when Pericles had the Parthenon (the most eminent monument of the ancient Greek architecture) built. Athens is built around the Acropolis and the pinnacled crag of Mt. Lycabettus, which the goddess Athena was said to have dropped from the heavens as a bulwark to defend the city. Te suburbs have covered the barren plain in all directions and the city is packed with lively taverns and bustling shops. Cyclades - Greece 5 Kea An exceptionally picturesque island. On the south side of Nikolaos Bay - which was a pirate stronghold in the 13th c. - is the little port of Korissia, built on the side of ancient Korissia. Tere are remains of the ancient town walls and a Sanctuary of Apollo. Te famous lion - carved from the native rock in the 6th c. BCE - can be seen just north-east of Kea town. Another highlight is the beautiful anchorage of Poleis. -

CYCLADES 1 WEEK Dazzling White Villages, Golden Beaches and Clear Azure Water Are Just the Start of What These Islands Have to Offer
Hermes Yachting P.C. 92-94 Kolokotroni str., 18535 Piraeus, Greece Tax No. EL801434127 Tel. +30 210 4110094 E-mail: [email protected] Web: www.hermesyachting.com CYCLADES 1 WEEK Dazzling white villages, golden beaches and clear azure water are just the start of what these islands have to offer. Within easy reach of Athens, these are the Aegean’s most precious gems. Ancient Greek geographers gave this unique cluster of islands the name Cyclades because they saw that they formed a circle (kyklos) of sorts around the sacred island of Delos. According to myth, the islands were the debris that remained after a battle between giants. In reality, they resulted from colossal geological events like earthquakes and volcanic eruptions. Their colours are blue and white like the Greek flag. The islands come in all sizes and, though the ingredients are the same – incomparable light, translucent water, heavenly beaches, lustrous white buildings and bare rock, each one has its own distinct character. The group’s stars, Mykonos and Santorini, need no introduction but the lesser-known islands, big and small, are just as rewarding. For starters, try aristocratic Syros, cosmopolitan Paros, the sculptors’ paradise of Tinos, bountiful Naxos, exotic Milos and historic Delos, not to mention the ‘hidden gems’ that adorn the Aegean, such as Tzia/Kea, Kythnos, Sifnos, Serifos, Amorgos, Sikinos, Anafi and Folegandros. Whether you’re travelling with your family, friends or sweetheart, you’re bound to find your summer paradise in the sun in the Cyclades. Beaches of indescribable beauty in the Cyclades What’s your idea of the perfect beach? Green-blue water and white sand? Beach bars and water sports? Framed by rocks for snorkelling and scuba diving? Is a secret Aegean cove accessible only on foot or by boat? No matter what your ideal is, you’ll find it in the Cyclades. -

Eruptive History and 40Ar/39Ar Geochronology of the Milos Volcanic 2 Field, Greece 3
https://doi.org/10.5194/gchron-2020-30 Preprint. Discussion started: 13 October 2020 c Author(s) 2020. CC BY 4.0 License. 1 Eruptive history and 40Ar/39Ar geochronology of the Milos volcanic 2 field, Greece 3 4 Xiaolong Zhou1, Klaudia Kuiper1, Jan Wijbrans1, Katharina Boehm1, Pieter Vroon1 5 1Department of Earth Sciences, VU University Amsterdam, De Boelelaan 1085, 1081 HV Amsterdam, The Netherlands. 6 Correspondence to: Xiaolong Zhou ([email protected]) 7 Abstract. High-resolution geochronology is essential to determine the growth-rate of volcanoes, which is one of the key factors 8 to establish the periodicity of explosive volcanic eruptions. However, there are less high-resolution eruptive histories (>106 9 years) determined for long-lived submarine arc volcanic complexes than for subaerial complexes, since the submarine 10 volcanoes are far more difficult to observe than subaerial ones. In this study, high-resolution geochronology and major element 11 data are presented for Milos Volcanic Field (VF) in the South Aegean Volcanic Arc, Greece. The Milos VF has been active 12 for over 3 Myrs, and the first two million years of its eruptive history occurred in a submarine setting that has emerged above 13 sea level nowadays. The long submarine volcanic history of the Milos VF makes it an excellent natural laboratory to study the 14 growth-rate of a long-lived submarine arc volcanic complex. This study reports twenty-one new high-precision 40Ar/39Ar ages 15 and major element compositions for eleven volcanic units of the Milos VF. This allows us to refine the volcanic evolution of 16 Milos into nine phases and five volcanic quiescence periods of longer than 200 kyrs, on the basis of age, composition, volcano 17 type and location. -

Mykonos Dreamslovebirdjewelrycollective.Com Our Inspriration
spring 2020 mykonos dreamslovebirdjewelrycollective.com our inspriration Our Spring 2020 collection is inspired by the sights, sounds, tastes and smells of Greece. The rose-hued sunset of Santorini, the turquoise waters of Crete, the flavors of the wine and food, the watercolor skies and pastel pottery. We hope when you put on a piece of our stunning pearl covered, Swarovski encrusted jewelry, you sense a taste of life in one of the most beautiful places in the world. “You have your brush, you have your colors, you paint the paradise, then in you go...” ~ N. Kazantzakis whatBrides are searching we for the do bridal experience now more than ever before. They value unique product, personal attention, and the bridal shopping experience that they can share online with their friends and followers. Big Box stores and mass retailers can’t compete when independently owned bridal stores focus on personalizing the shopping experience to best serve their brides! At Lovebird Jewelry Collective, we design heirloom quality jewelry for the modern brides. Whether it be a fashionista with a taste for flair or a classic bride with a love for all things pearl, we design with our brides in mind. Our jewelry line consists of only the highest quality materials such as Swarovski crystal, freshwater pearl, brass and sterling silver. No nickel allergies here! Many of our bridal boutique retailers will customize Lovebird jewelry pieces for their bridal clients. Whether it be changing from silver to gold, adding extra length to a lariat or switching a pave to a pearl, don’t be afraid to ask! Each jewelry piece is hand made to order right here in the US. -
Appendix F – Schedule K
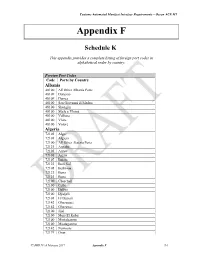
Customs Automated Manifest Interface Requirements – Ocean ACE M1 Appendix F Schedule K This appendix provides a complete listing of foreign port codes in alphabetical order by country. Foreign Port Codes Code Ports by Country Albania 48100 All Other Albania Ports 48109 Durazzo 48109 Durres 48100 San Giovanni di Medua 48100 Shengjin 48100 Skele e Vlores 48100 Vallona 48100 Vlore 48100 Volore Algeria 72101 Alger 72101 Algiers 72100 All Other Algeria Ports 72123 Annaba 72105 Arzew 72105 Arziw 72107 Bejaia 72123 Beni Saf 72105 Bethioua 72123 Bona 72123 Bone 72100 Cherchell 72100 Collo 72100 Dellys 72100 Djidjelli 72101 El Djazair 72142 Ghazaouet 72142 Ghazawet 72100 Jijel 72100 Mers El Kebir 72100 Mestghanem 72100 Mostaganem 72142 Nemours 72179 Oran CAMIR V1.4 February 2017 Appendix F F-1 Customs Automated Manifest Interface Requirements – Ocean ACE M1 72189 Skikda 72100 Tenes 72179 Wahran American Samoa 95101 Pago Pago Harbor Angola 76299 All Other Angola Ports 76299 Ambriz 76299 Benguela 76231 Cabinda 76299 Cuio 76274 Lobito 76288 Lombo 76288 Lombo Terminal 76278 Luanda 76282 Malongo Oil Terminal 76279 Namibe 76299 Novo Redondo 76283 Palanca Terminal 76288 Port Lombo 76299 Porto Alexandre 76299 Porto Amboim 76281 Soyo Oil Terminal 76281 Soyo-Quinfuquena term. 76284 Takula 76284 Takula Terminal 76299 Tombua Anguilla 24821 Anguilla 24823 Sombrero Island Antigua 24831 Parham Harbour, Antigua 24831 St. John's, Antigua Argentina 35700 Acevedo 35700 All Other Argentina Ports 35710 Bagual 35701 Bahia Blanca 35705 Buenos Aires 35703 Caleta Cordova 35703 Caleta Olivares 35703 Caleta Olivia 35711 Campana 35702 Comodoro Rivadavia 35700 Concepcion del Uruguay 35700 Diamante 35700 Ibicuy CAMIR V1.4 February 2017 Appendix F F-2 Customs Automated Manifest Interface Requirements – Ocean ACE M1 35737 La Plata 35740 Madryn 35739 Mar del Plata 35741 Necochea 35779 Pto. -

Celestyal Cruises Idyllic Aegean 2021/2022 Brochure
IDYLLIC AEGEAN 7 NIGHT ALL-INCLUSIVE CRUISING 2021 - 2022 IDYLLIC AEGEAN Seven night All-Inclusive cruise Come and be serenaded by the romance of the Aegean on this exciting new cruise. Visit the most enchanting Greek island destinations dotted around the Aegean Sea, where culture, history, pristine beaches, and fishing villages suspended in time all await. What’s included Voyage highlights Onboard dining • Over-night stay in glamorous Santorini • 24 hours in Mykonos Unlimited classic drinks • A full day to explore Rhodes Select excursions Entertainment onboard Gratuities Celestyal promise 2021 IDYLLIC AEGEAN 2022 Athens Kusadasi Rhodes Agios Nikolaos Santorini Milos Mykonos ALL-INCLUSIVE FROM US$1,250* PER PERSON Milos Idyllic Aegean 2021/2022 Day 1: Athens - We leave the historic and classical Day 5: Santorini - Santorini is instantly recognisable capital of Greece and set sail on our overnight voyage and we are sure she will take your breath away, with her to Turkey. Your fi rst night will give you the opportunity soaring landscapes, clusters of whitewashed houses to relax, indulge in our All-Inclusive hospitality and in the capital Fira, incredible sunsets and of course the anticipate the adventures ahead on your very own iconic blue-domed church at Oia. And don’t forget to Aegean Odyssey of discovery. try one of the many restaurants jostling for position at the edge of the caldera. In the evening you can explore Day 2: Kusadasi - Our morning arrival gives us all day in at leisure or simply relax on deck sipping cocktails or a Kusadasi, plenty of time to explore the colourful beach glass of fi ne wine. -

Cyclades - Greece
6 DAYS CHARTER ITINERARY Kea CYCLADES - GREECE Syros Mykonos Serifos Paros Ios Milos PORTS & DISTANCES Day Ports Distance 1 Athens - Kea 49 2 Kea - Serifos 35 3 Serifos - Milos 25 4 Milos - Ios 50 5 Ios - Paros 30 6 Paros - Syros 25 7 Syros - Mykonos 18 KEA An exceptionally picturesque island. On the south side of Nikolaos Bay - which was a pirate stronghold in the 13th c. - is the little port of Korissia, built on the side of ancient Korissia. There are remains of the ancient town walls and a Sanctuary of Apollo. The famous lion - carved from the native rock in the 6th c. BCE - can be seen just north-east of Kea town. Another highlight is the beautiful anchorage of Poleis. Vourkari is a small bay with many traditional taverns, small shops and bars and is certainly worth a visit. Day 1 SERIFOS Serifos is an island renowned for its excellent food and relaxed atmosphere. Most of the anchorages in the south are now used by fish farms. Moreover, apart from Livadi and the Monastery of the Taxiarchs in the north, there is much to be seen. Its highest point is Mount Tourlos with 483 m. The island's main sources of income are its modest agriculture and its open-cast iron mines, which have been worked since ancient times. Day 2 MILOS A volcanic island with spectacular geological and rock formations and exceptional beaches with turquoise waters. It has one of the best harbors in the Mediterranean, formed when the sea broke into the crater through a gap on its north-west side. -

Climatic Bulletin September 2018
Climatic September 2018 Bulletin Μax temperature Μin temperature Μean temperature Precipitatio n Sunshine duration September started with high temperatures and ended with very low ones. Meanwhile during last week a rare bad weather event recorded which characterized by the appearance of northerly strong gale winds (25-28/9) over Aegean and by the outbreak of heavy rainfalls and thunderstorms (29-30/9). Mostly affected areas the eastern parts of Peloponnese and of central mainland. Climatic Bulletin September 2018 T e m p e r a t u r e 4 2 4 1 4 0 First 10-day period 7 5 3 9 4 More specific (varied) : 3 2 Minimum: 1 3 8 ο ο 0 from 9 C to 20 C over north mainland, - 1 - 2 ο ο 3 7 from 12 C to 27 C over central mainland, - 3 ο ο - 4 from 12 C to 26 C over rest parts. - 5 3 6 Maximum: - 7 ο ο from 27 C to 37 C over north mainland, 3 5 ο ο from 29 C to 38 C over central mainland, 3 4 from 28οC to 37οC over rest parts. 1 9 2 0 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 2 9 Deviation of mean temperature from normal values 4 2 Second 10-day period 4 1 More specific (varied) : 4 0 Minimum: 7 ο ο 5 from 7 C to 20 C over north mainland, 3 9 4 ο ο 3 from 12 C to 24 C over central mainland, 2 1 ο ο 3 8 from 11 C to 24 C over rest parts. -

Proceedings Ofthe Danish Institute at Athens • II
Proceedings ofthe Danish Institute at Athens • II Edited by Seven Dietz & Signe Isager Aarhus U niversitetstorlag Langelandsgade 177 8200 Arhus N © Copyright The Danish Institute at Athens,Athens 1998 The publication was sponsored by: The Danish Research Council for the Humanities. Consul General Gosta Enbom's Foundation. Konsul Georgjorck og hustru Emmajorck's Fond. Proceedings of the Danish Institute at Athens General Editor: Seren Dietz and Signe Isager Graphic design and Production by: Freddy Pedersen Printed in Denmark on permanent paper ISBN 87 7288 722 2 Distributed by: AARHUS UNIVERSITY PRESS University ofAarhus DK-8000 Arhus C Fax (+45) 8619 8433 73 Lime Walk Headington, Oxford OX3 7AD Fax (+44) 865 750 079 Box 511 Oakvill, Conn. 06779 Fax (+1) 203 945 94 9468 The drawing reproduced as cover illustration represents Kristian Jeppesen's proposal for the restoration of the Maussolleion, in particular of the colonnade (PTERON) in which portrait statues of members of the Hecatomnid dynasty said to have been carved by the famous artists Scopas, Bryaxis,Timotheos, and Leochares were exhibited. Drawing by the author, see p. 173, Abb. 5, C. The Cyclades and the Mainland in the Shaft Grave Period - a summary Soren Dietz Abstract sophistication in metalwork and otherfields of handicraft. In the years before the volcanic de It is usual to consider the main economic, social struction ofThera, Mainland influences arefelt and artistic trends in early Mycenaean society as strongly onThera. It should be emphasized, demonstrated in the Shaft Graves of Mycenae however, that the new preeminent objects in to be derived more orless directly from Crete. -

Investigation of Hydrothermal Vents in the Aegean Sea Using an Integrated Mass Spectrometer and Acoustic Navigation System Onboard a Human Occupied Submersible R
INVESTIGATION OF HYDROTHERMAL VENTS IN THE AEGEAN SEA USING AN INTEGRATED MASS SPECTROMETER AND ACOUSTIC NAVIGATION SYSTEM ONBOARD A HUMAN OCCUPIED SUBMERSIBLE R. Camilli 1 *, D. Sakellariou 2, B. Foley 1, C. Anagnostou 2, A. Malios 2, B. Bingham 3, R. Eustice 4, J. Goudreau 1, K. Katsaros 2 1 Woods Hole Oceanographic Institution - [email protected] 2 Hellenic Center for Marine Research 3 Franklin W. Olin College 4 University of Michigan Abstract In June and July of 2006 a research program was undertaken to investigate areas of suspected hydrothermal venting at the Greek islands of Milos and Santorini. This program utilized the HCMR Thetis research submersible equipped with a navigation tracking system and in-situ chemical sensors. This integrated sensor payload successfully mapped and chemically characterized hydrothermal venting in real-time. Keywords : Aegean Sea, Chemical Analysis, Instruments And Techniques, Mapping, Hellenic Arc. The 2006 project PHAEDRA investigated Aegean Sea hydrothermal vent- variation in gas concentrations, suggesting that these sites were not hy- ing near the islands of Milos and Santorini. In order to conduct field work drothermally active. The authors would like to thank the Hellenic Center at these sites, the authors developed novel technologies into the HCMR for Marine Research and the United States NOAA Office of Ocean Explo- Thetis human occupied submersible, including an Ethernet communi- ration for their support of this research program. cation system, navigation tracking system, and in-situ chemical sensors -including a Gemini in-situ mass spectrometer, CTD, dissolved oxygen sensor, and manipulator arm triggerable Niskin bottles for post-dive gas chromatographic analysis. -

Idyllic Aegean 2021
IDYLLICATHENS | KUSADASI |RHODES | CRETE (HERAKLION) AEGEAN | SANTORINI | MILOS | MYKONOS Seven night All-Inclusive cruise aboard Celestyal Crystal Come and be serenaded by the romance of the Aegean on this exciting new cruise.Visit the most enchanting Greek island destinations dotted around the Aegean Sea,where culture, history, pristine beaches, and fishing villages suspended in time all await. Voyage highlights What’s included • Over-night stay in glamorous Santorini All meals onboard • 24 hours in Mykonos • A full day to explore Rhodes Unlimited drinks package Select excursions Entertainment onboard Gratuities Your itinerary Athens Kusadasi Mykonos Milos Santorini Rhodes Heraklion DAY PORTS ARRIVE DEPART Sat Athens, Greece 19:00 Sun Kusadasi, Turkey 08:00 19:00 Mon Rhodes, Greece 08:00 18:00 Tue Crete (Heraklion), Greece 08:00 23:59 Wed Santorini*, Greece 07:00 Thu Santorini*, Greece 02:30 Thu Milos*, Greece 08:30 13:30 Thu Mykonos*, Greece 19:00 Fri Mykonos*, Greece 19:00 Sat Athens, Greece 09:00 *Tendering weather permitting. Why not start your cruise in Kusadasi 2021 SAILING DATES: April 03, 10, 17, 24 August 07, 14, 21, 28 May 01, 08, 15, 22, 29 September 04, 11, 18, 25 June 05, 12, 19, 26 October 02, 09 July 03, 10, 17, 24, 31 Idyllic Aegean 2021 Day 1: Athens - We leave the historic and classical capital Day 5: Santorini - Santorini is instantly recognisable and we of Greece aboard the Celestyal Crystal and set sail on our are sure she will take your breath away, with her soaring overnight voyage to Turkey. Your first night will give you the landscapes, clusters of whitewashed houses in the capital opportunity to relax, indulge in our All-Inclusive hospitality Fira, incredible sunsets and of course the iconic blue- and anticipate the adventures ahead on your very own domed church at Oia.