Pose Tracking I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Review About Augmented Reality Tools and Developing a Virtual Reality Application
Academic Journal of Science, CD-ROM. ISSN: 2165-6282 :: 03(02):139–146 (2014) $5(9,(:$%287$8*0(17('5($/,7<722/6$1' '(9(/23,1*$9,578$/5($/,7<$33/,&$7,21%$6('21 ('8&$7,21 0XVWDID8ODVDQG6DID0HUYH7DVFL )LUDW8QLYHULVLW\7XUNH\ Augmented Reality (AR) is a technology that gained popularity in recent years. It is defined as placement of virtual images over real view in real time. There are a lot of desktop applications which are using Augmented Reality. The rapid development of technology and easily portable mobile devices cause the increasing of the development of the applications on the mobile device. The elevation of the device technology leads to the applications and cause the generating of the new tools. There are a lot of AR Tool Kits. They differ in many ways such as used methods, Programming language, Used Operating Systems, etc. Firstly, a developer must find the most effective tool kits between them. This study is more of a guide to developers to find the best AR tool kit choice. The tool kit was examined under three main headings. The Parameters such as advantages, disadvantages, platform, and programming language were compared. In addition to the information is given about usage of them and a Virtual Reality application has developed which is based on Education. .H\ZRUGV Augmented reality, ARToolKit, Computer vision, Image processing. ,QWURGXFWLRQ Augmented reality is basically a snapshot of the real environment with virtual environment applications that are brought together. Basically it can be operated on every device which has a camera display and operation system. -
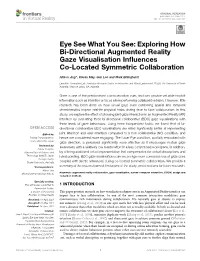
Exploring How Bi-Directional Augmented Reality Gaze Visualisation Influences Co-Located Symmetric Collaboration
ORIGINAL RESEARCH published: 14 June 2021 doi: 10.3389/frvir.2021.697367 Eye See What You See: Exploring How Bi-Directional Augmented Reality Gaze Visualisation Influences Co-Located Symmetric Collaboration Allison Jing*, Kieran May, Gun Lee and Mark Billinghurst Empathic Computing Lab, Australian Research Centre for Interactive and Virtual Environment, STEM, The University of South Australia, Mawson Lakes, SA, Australia Gaze is one of the predominant communication cues and can provide valuable implicit information such as intention or focus when performing collaborative tasks. However, little research has been done on how virtual gaze cues combining spatial and temporal characteristics impact real-life physical tasks during face to face collaboration. In this study, we explore the effect of showing joint gaze interaction in an Augmented Reality (AR) interface by evaluating three bi-directional collaborative (BDC) gaze visualisations with three levels of gaze behaviours. Using three independent tasks, we found that all bi- directional collaborative BDC visualisations are rated significantly better at representing Edited by: joint attention and user intention compared to a non-collaborative (NC) condition, and Parinya Punpongsanon, hence are considered more engaging. The Laser Eye condition, spatially embodied with Osaka University, Japan gaze direction, is perceived significantly more effective as it encourages mutual gaze Reviewed by: awareness with a relatively low mental effort in a less constrained workspace. In addition, Naoya Isoyama, Nara Institute of Science and by offering additional virtual representation that compensates for verbal descriptions and Technology (NAIST), Japan hand pointing, BDC gaze visualisations can encourage more conscious use of gaze cues Thuong Hoang, Deakin University, Australia coupled with deictic references during co-located symmetric collaboration. -
Virtual and Augmented Reality
Virtual and Augmented Reality Virtual and Augmented Reality: An Educational Handbook By Zeynep Tacgin Virtual and Augmented Reality: An Educational Handbook By Zeynep Tacgin This book first published 2020 Cambridge Scholars Publishing Lady Stephenson Library, Newcastle upon Tyne, NE6 2PA, UK British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library Copyright © 2020 by Zeynep Tacgin All rights for this book reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the copyright owner. ISBN (10): 1-5275-4813-9 ISBN (13): 978-1-5275-4813-8 TABLE OF CONTENTS List of Illustrations ................................................................................... x List of Tables ......................................................................................... xiv Preface ..................................................................................................... xv What is this book about? .................................................... xv What is this book not about? ............................................ xvi Who is this book for? ........................................................ xvii How is this book used? .................................................. xviii The specific contribution of this book ............................. xix Acknowledgements ........................................................... -

Advanced Displays and Techniques for Telepresence COAUTHORS for Papers in This Talk
Advanced Displays and Techniques for Telepresence COAUTHORS for papers in this talk: Young-Woon Cha Rohan Chabra Nate Dierk Mingsong Dou Wil GarreM Gentaro Hirota Kur/s Keller Doug Lanman Mark Livingston David Luebke Andrei State (UNC) 1994 Andrew Maimone Surgical Consulta/on Telepresence Federico Menozzi EMa Pisano, MD Henry Fuchs Kishore Rathinavel UNC Chapel Hill Andrei State Eric Wallen, MD ARPA-E Telepresence Workshop Greg Welch Mary WhiMon April 26, 2016 Xubo Yang Support gratefully acknowledged: CISCO, Microsoft Research, NIH, NVIDIA, NSF Awards IIS-CHS-1423059, HCC-CGV-1319567, II-1405847 (“Seeing the Future: Ubiquitous Computing in EyeGlasses”), and the BeingThere Int’l Research Centre, a collaboration of ETH Zurich, NTU Singapore, UNC Chapel Hill and Singapore National Research Foundation, Media Development Authority, and Interactive Digital Media Program Office. 1 Video Teleconferencing vs Telepresence • Video Teleconferencing • Telepresence – Conven/onal 2D video capture and – Provides illusion of presence in the display remote or combined local&remote space – Single camera, single display at each – Provides proper stereo views from the site is common configura/on for precise loca/on of the user Skype, Google Hangout, etc. – Stereo views change appropriately as user moves – Provides proper eye contact and eye gaze cues among all the par/cipants Cisco TelePresence 3000 Three distant rooms combined into a single space with wall-sized 3D displays 2 Telepresence Component Technologies • Acquisi/on (cameras) • 3D reconstruc/on Cisco -
New Realities Risks in the Virtual World 2
Emerging Risk Report 2018 Technology New realities Risks in the virtual world 2 Lloyd’s disclaimer About the author This report has been co-produced by Lloyd's and Amelia Kallman is a leading London futurist, speaker, Amelia Kallman for general information purposes only. and author. As an innovation and technology While care has been taken in gathering the data and communicator, Amelia regularly writes, consults, and preparing the report Lloyd's does not make any speaks on the impact of new technologies on the future representations or warranties as to its accuracy or of business and our lives. She is an expert on the completeness and expressly excludes to the maximum emerging risks of The New Realities (VR-AR-MR), and extent permitted by law all those that might otherwise also specialises in the future of retail. be implied. Coming from a theatrical background, Amelia started Lloyd's accepts no responsibility or liability for any loss her tech career by chance in 2013 at a creative or damage of any nature occasioned to any person as a technology agency where she worked her way up to result of acting or refraining from acting as a result of, or become their Global Head of Innovation. She opened, in reliance on, any statement, fact, figure or expression operated and curated innovation lounges in both of opinion or belief contained in this report. This report London and Dubai, working with start-ups and corporate does not constitute advice of any kind. clients to develop connections and future-proof strategies. Today she continues to discover and bring © Lloyd’s 2018 attention to cutting-edge start-ups, regularly curating All rights reserved events for WIRED UK. -

Augmented Reality, Virtual Reality, & Health
University of Massachusetts Medical School eScholarship@UMMS National Network of Libraries of Medicine New National Network of Libraries of Medicine New England Region (NNLM NER) Repository England Region 2017-3 Augmented Reality, Virtual Reality, & Health Allison K. Herrera University of Massachusetts Medical School Et al. Let us know how access to this document benefits ou.y Follow this and additional works at: https://escholarship.umassmed.edu/ner Part of the Health Information Technology Commons, Library and Information Science Commons, and the Public Health Commons Repository Citation Herrera AK, Mathews FZ, Gugliucci MR, Bustillos C. (2017). Augmented Reality, Virtual Reality, & Health. National Network of Libraries of Medicine New England Region (NNLM NER) Repository. https://doi.org/ 10.13028/1pwx-hc92. Retrieved from https://escholarship.umassmed.edu/ner/42 Creative Commons License This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 4.0 License. This material is brought to you by eScholarship@UMMS. It has been accepted for inclusion in National Network of Libraries of Medicine New England Region (NNLM NER) Repository by an authorized administrator of eScholarship@UMMS. For more information, please contact [email protected]. Augmented Reality, Virtual Reality, & Health Zeb Mathews University of Tennessee Corina Bustillos Texas Tech University Allison Herrera University of Massachusetts Medical School Marilyn Gugliucci University of New England Outline Learning Objectives Introduction & Overview Objectives: • Explore AR & VR technologies and Augmented Reality & Health their impact on health sciences, Virtual Reality & Health with examples of projects & research Technology Funding Opportunities • Know how to apply for funding for your own AR/VR health project University of New England • Learn about one VR project funded VR Project by the NNLM Augmented Reality and Virtual Reality (AR/VR) & Health What is AR and VR? F. -

Augmented Reality for Unity: the Artoolkit Package JM Vezien Jan
Augmented reality for Unity: the ARToolkit package JM Vezien Jan 2016 ARToolkit provides an easy way to develop AR applications in Unity via the ARTookit package for Unity, available for download at: http://artoolkit.org/documentation/doku.php?id=6_Unity:unity_about The installation is covered in: http://artoolkit.org/documentation/doku.php?id=6_Unity:unity_getting_started Basically, you import the package via Assets--> Import Package--> custom Package Current version is 5.3.1 Once imported, the package provides assets in the ARToolkit5-Unity hierarchy. There is also an additional ARToolkit entry in the general menu of unity. A bunch of example scenes are available for trials in ARToolkit5-Unity-->Example scenes. The simplest is SimpleScene.unity, where a red cube is attached to a "Hiro" pattern, like the simpleTest example in the original ARToolkit tutorials. The way ARToolkit for Unity organises information is simple: • The mandatory component for ARToolkit is called a ARController. Aside from managing the camera parameters (for example, selecting the video input), it also records the complete list of markers your application will use, via ARMarker scripts (one per marker). • A "Scene Root" will contain everything you need to AR display. It is a standard (usually empty) object with a AR Origin script. the rest of the scene will be children of it. • The standard camera remains basically the same, but is now driven by a specific ARCamera script. By default, the camera is a video see-through (like a webcam). • Objects to be tracked are usually "empty" geomeries (GameObject--> Create empty) to which one attaches a special AR Tracked Object script. -

Application of Augmented Reality and Robotic Technology in Broadcasting: a Survey
Review Application of Augmented Reality and Robotic Technology in Broadcasting: A Survey Dingtian Yan * and Huosheng Hu School of Computer Science and Electronic Engineering, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, UK; [email protected] * Correspondence: [email protected]; Tel.: +44-1206-874092 Received: 26 May 2017; Accepted: 7 August 2017; Published: 17 August 2017 Abstract: As an innovation technique, Augmented Reality (AR) has been gradually deployed in the broadcast, videography and cinematography industries. Virtual graphics generated by AR are dynamic and overlap on the surface of the environment so that the original appearance can be greatly enhanced in comparison with traditional broadcasting. In addition, AR enables broadcasters to interact with augmented virtual 3D models on a broadcasting scene in order to enhance the performance of broadcasting. Recently, advanced robotic technologies have been deployed in a camera shooting system to create a robotic cameraman so that the performance of AR broadcasting could be further improved, which is highlighted in the paper. Keyword: Augmented Reality (AR); AR broadcasting; AR display; AR tracking; Robotic Cameraman 1. Introduction Recently, there is an optimistic prospect on installing Augmented Reality (AR) contents in broadcasting, which is customizable, dynamic and interactive. AR aims at changing the appearance of a real environment by merging virtual contents with real-world objects. Through attaching virtual content on a real-world environment, broadcasting industries avoid physically changing the appearance of a broadcasting studio. In addition, broadcasters can tell a much more detailed and compelling story through interacting with 3D virtual models rather than with verbal descriptions only. -

Calar: a C++ Engine for Augmented Reality Applications on Android Mobile Devices
CalAR: A C++ Engine for Augmented Reality Applications on Android Mobile Devices Menghe Zhang, Karen Lucknavalai, Weichen Liu, J ¨urgen P. Schulze; University of California San Diego, La Jolla, CA, USA Abstract With the development of Apple’s ARKit and Google’s AR- Core, mobile augmented reality (AR) applications have become much more popular. For Android devices, ARCore provides ba- sic motion tracking and environmental understanding. However, with current software frameworks it can be difficult to create an AR application from the ground up. Our solution is CalAR, which is a lightweight, open-source software environment to develop AR applications for Android devices, while giving the programmer full control over the phone’s resources. With CalAR, the pro- grammer can create marker-less AR applications which run at 60 Figure 1: CalAR’s software structure and dependencies frames per second on Android smartphones. These applications can include more complex environment understanding, physical accessed through the smartphone’s touch screen. simulation, user interaction with virtual objects, and interaction This article describes each component of the software system between virtual objects and objects in the physical environment. we built, and summarizes our experiences with two demonstration With CalAR being based on CalVR, which is our multi-platform applications we created with CalAR. virtual reality software engine, it is possible to port CalVR ap- plications to an AR environment on Android phones with minimal Related Work effort. We demonstrate this with the example of a spatial visual- In the early days of augmented reality applications on smart ization application. phones, fiducial markers located in the physical environment were used to estimate the phone’s 3D pose with respect to the envi- Introduction ronment. -
Augmented Reality and Its Aspects: a Case Study for Heating Systems
Augmented Reality and its aspects: a case study for heating systems. Lucas Cavalcanti Viveiros Dissertation presented to the School of Technology and Management of Bragança to obtain a Master’s Degree in Information Systems. Under the double diploma course with the Federal Technological University of Paraná Work oriented by: Prof. Paulo Jorge Teixeira Matos Prof. Jorge Aikes Junior Bragança 2018-2019 ii Augmented Reality and its aspects: a case study for heating systems. Lucas Cavalcanti Viveiros Dissertation presented to the School of Technology and Management of Bragança to obtain a Master’s Degree in Information Systems. Under the double diploma course with the Federal Technological University of Paraná Work oriented by: Prof. Paulo Jorge Teixeira Matos Prof. Jorge Aikes Junior Bragança 2018-2019 iv Dedication I dedicate this work to my friends and my family, especially to my parents Tadeu José Viveiros and Vera Neide Cavalcanti, who have always supported me to continue my stud- ies, despite the physical distance has been a demand factor from the beginning of the studies by the change of state and country. v Acknowledgment First of all, I thank God for the opportunity. All the teachers who helped me throughout my journey. Especially, the mentors Paulo Matos and Jorge Aikes Junior, who not only provided the necessary support but also the opportunity to explore a recent area that is still under development. Moreover, the professors Paulo Leitão and Leonel Deusdado from CeDRI’s laboratory for allowing me to make use of the HoloLens device from Microsoft. vi Abstract Thanks to the advances of technology in various domains, and the mixing between real and virtual worlds. -

Security and Privacy Approaches in Mixed Reality:A Literature Survey
0 Security and Privacy Approaches in Mixed Reality: A Literature Survey JAYBIE A. DE GUZMAN, University of New South Wales and Data 61, CSIRO KANCHANA THILAKARATHNA, University of Sydney and Data 61, CSIRO ARUNA SENEVIRATNE, University of New South Wales and Data 61, CSIRO Mixed reality (MR) technology development is now gaining momentum due to advances in computer vision, sensor fusion, and realistic display technologies. With most of the research and development focused on delivering the promise of MR, there is only barely a few working on the privacy and security implications of this technology. is survey paper aims to put in to light these risks, and to look into the latest security and privacy work on MR. Specically, we list and review the dierent protection approaches that have been proposed to ensure user and data security and privacy in MR. We extend the scope to include work on related technologies such as augmented reality (AR), virtual reality (VR), and human-computer interaction (HCI) as crucial components, if not the origins, of MR, as well as numerous related work from the larger area of mobile devices, wearables, and Internet-of-ings (IoT). We highlight the lack of investigation, implementation, and evaluation of data protection approaches in MR. Further challenges and directions on MR security and privacy are also discussed. CCS Concepts: •Human-centered computing ! Mixed / augmented reality; •Security and privacy ! Privacy protections; Usability in security and privacy; •General and reference ! Surveys and overviews; Additional Key Words and Phrases: Mixed Reality, Augmented Reality, Privacy, Security 1 INTRODUCTION Mixed reality (MR) was used to pertain to the various devices – specically, displays – that encompass the reality-virtuality continuum as seen in Figure1(Milgram et al . -

Calar: a C++ Engine for Augmented Reality Applications on Android Mobile Devices
https://doi.org/10.2352/ISSN.2470-1173.2020.13.ERVR-364 © 2020, Society for Imaging Science and Technology CalAR: A C++ Engine for Augmented Reality Applications on Android Mobile Devices Menghe Zhang, Karen Lucknavalai, Weichen Liu, J ¨urgen P. Schulze; University of California San Diego, La Jolla, CA, USA Abstract With the development of Apple’s ARKit and Google’s AR- Core, mobile augmented reality (AR) applications have become much more popular. For Android devices, ARCore provides ba- sic motion tracking and environmental understanding. However, with current software frameworks it can be difficult to create an AR application from the ground up. Our solution is CalAR, which is a lightweight, open-source software environment to develop AR applications for Android devices, while giving the programmer full control over the phone’s resources. With CalAR, the pro- grammer can create marker-less AR applications which run at 60 Figure 1: CalAR’s software structure and dependencies frames per second on Android smartphones. These applications can include more complex environment understanding, physical accessed through the smartphone’s touch screen. simulation, user interaction with virtual objects, and interaction This article describes each component of the software system between virtual objects and objects in the physical environment. we built, and summarizes our experiences with two demonstration With CalAR being based on CalVR, which is our multi-platform applications we created with CalAR. virtual reality software engine, it is possible to port CalVR ap- plications to an AR environment on Android phones with minimal Related Work effort. We demonstrate this with the example of a spatial visual- In the early days of augmented reality applications on smart ization application.