Doppler Estimators Using Pilot Tones for OFDM Communication Signal in Shallow Water Environment Bastien Lyonnet, Cyrille Siclet, Jean-Marc Brossier
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

FM Stereo Format 1
A brief history • 1931 – Alan Blumlein, working for EMI in London patents the stereo recording technique, using a figure-eight miking arrangement. • 1933 – Armstrong demonstrates FM transmission to RCA • 1935 – Armstrong begins 50kW experimental FM station at Alpine, NJ • 1939 – GE inaugurates FM broadcasting in Schenectady, NY – TV demonstrations held at World’s Fair in New York and Golden Gate Interna- tional Exhibition in San Francisco – Roosevelt becomes first U.S. president to give a speech on television – DuMont company begins producing television sets for consumers • 1942 – Digital computer conceived • 1945 – FM broadcast band moved to 88-108MHz • 1947 – First taped US radio network program airs, featuring Bing Crosby – 3M introduces Scotch 100 audio tape – Transistor effect demonstrated at Bell Labs • 1950 – Stereo tape recorder, Magnecord 1250, introduced • 1953 – Wireless microphone demonstrated – AM transmitter remote control authorized by FCC – 405-line color system developed by CBS with ”crispening circuits” to improve apparent picture resolution 1 – FCC reverses its decision to approve the CBS color system, deciding instead to authorize use of the color-compatible system developed by NTSC – Color TV broadcasting begins • 1955 – Computer hard disk introduced • 1957 – Laser developed • 1959 – National Stereophonic Radio Committee formed to decide on an FM stereo system • 1960 – Stereo FM tests conducted over KDKA-FM Pittsburgh • 1961 – Great Rose Bowl Hoax University of Washington vs. Minnesota (17-7) – Chevrolet Impala ‘Super Sport’ Convertible with 409 cubic inch V8 built – FM stereo transmission system approved by FCC – First live televised presidential news conference (John Kennedy) • 1962 – Philips introduces audio cassette tape player – The Beatles release their first UK single Love Me Do/P.S. -

An Analysis of a Quadrature Double-Sideband/Frequency Modulated Communication System
Scholars' Mine Masters Theses Student Theses and Dissertations 1970 An analysis of a quadrature double-sideband/frequency modulated communication system Denny Ray Townson Follow this and additional works at: https://scholarsmine.mst.edu/masters_theses Part of the Electrical and Computer Engineering Commons Department: Recommended Citation Townson, Denny Ray, "An analysis of a quadrature double-sideband/frequency modulated communication system" (1970). Masters Theses. 7225. https://scholarsmine.mst.edu/masters_theses/7225 This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. AN ANALYSIS OF A QUADRATURE DOUBLE- SIDEBAND/FREQUENCY MODULATED COMMUNICATION SYSTEM BY DENNY RAY TOWNSON, 1947- A THESIS Presented to the Faculty of the Graduate School of the UNIVERSITY OF MISSOURI - ROLLA In Partial Fulfillment of the Requirements for the Degree MASTER OF SCIENCE IN ELECTRICAL ENGINEERING 1970 ii ABSTRACT A QDSB/FM communication system is analyzed with emphasis placed on the QDSB demodulation process and the AGC action in the FM transmitter. The effect of noise in both the pilot and message signals is investigated. The detection gain and mean square error is calculated for the QDSB baseband demodulation process. The mean square error is also evaluated for the QDSB/FM system. The AGC circuit is simulated on a digital computer. Errors introduced into the AGC system are analyzed with emphasis placed on nonlinear gain functions for the voltage con trolled amplifier. -
A Muiti-Mode Modulation and Demodulation System and Method
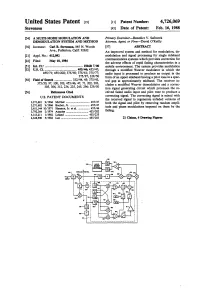
United States Patent [191 [11] Patent Number: 4,726,069 Stevenson [45] Date of Patent: Feb. 16, 1988 [54] A MUITI-MODE MODULATION AND Primary Examiner-Benedict V. Safourek DEMODULATION SYSTEM AND METHOD Attorney, Agent, or Firm-David O'Reilly [76] Inventor: Carl R. Stevenson, 845 N. Woods [571 ABSTRACT Ave., Fullerton, Calif. 92632 An improved system and method for modulation, de- [21] Appl. No.: 6l2,092 modulation and signal processing for single sideband communications systems which provides correction for [22] Filed. May 18,l984 the adverse effects of rapid fading characteristics in a [51] Int. c1.4 ............................................... H04B 7/00 mobile environment. The system provides modulation [52] US. c1. ........................................ 455/46; 455/47; through a modified Weaver modulator in which the 455/71; 455/202; 375/50; 375/61; 375/77; audio input is processed to produce an output in the 375/97; 329/50 form of an upper sideband having a pilot tone in a spec- [58] Field of Search ...................... 332/44, 45; 375/43, tral gap at approximately midband. The receiver in- 375/50,97, 100, 102; 455/46,47, 71, 202, 203, cludes a modified Weaver demodulator and a correc- 305, 306, 312,234, 235,245,296; 329/50 tion signal generating circuit which processes the re- t561 References Cited ceived faded audio input and pilot tone to produce a U.S. PATENT DOCUMENTS correcting signal. The correcting signal is mixed with the received signal to regenerate unfaded versions of 3,271,681 9/1966 MCN& ................................. 455147 both the signal and pilot by removing random ampli- 3,271,682 9/1966 Bucher, Jr. -

NTSC Specifications
NTSC Modulation Standard ━━━━━━━━━━━━━━━━━━━━━━━━ The Impressionistic Era of TV. It©s Never The Same Color! The first analog Color TV system realized which is backward compatible with the existing B & W signal. To combine a Chroma signal with the existing Luma(Y)signal a quadrature sub-carrier Chroma signal is used. On the Cartesian grid the x & y axes are defined with B−Y & R−Y respectively. When transmitted along with the Luma(Y) G−Y signal can be recovered from the B−Y & R−Y signals. Matrixing ━━━━━━━━━ Let: R = Red \ G = Green Each range from 0 to 1. B = Blue / Y = Matrixed B & W Luma sub-channel. U = Matrixed Blue Chroma sub-channel. U #2900FC 249.76° −U #D3FC00 69.76° V = Matrixed Red Chroma sub-channel. V #FF0056 339.76° −V #00FFA9 159.76° W = Matrixed Green Chroma sub-channel. W #1BFA00 113.52° −W #DF00FA 293.52° HSV HSV Enhanced channels: Hue Hue I = Matrixed Skin Chroma sub-channel. I #FC6600 24.29° −I #0096FC 204.29° Q = Matrixed Purple Chroma sub-channel. Q #8900FE 272.36° −Q #75FE00 92.36° We have: Y = 0.299 × R + 0.587 × G + 0.114 × B B − Y = −0.299 × R − 0.587 × G + 0.886 × B R − Y = 0.701 × R − 0.587 × G − 0.114 × B G − Y = −0.299 × R + 0.413 × G − 0.114 × B = −0.194208 × (B − Y) −0.509370 × (R − Y) (−0.1942078377, −0.5093696834) Encode: If: U[x] = 0.492111 × ( B − Y ) × 0° ┐ Quadrature (0.4921110411) V[y] = 0.877283 × ( R − Y ) × 90° ┘ Sub-Carrier (0.8772832199) Then: W = 1.424415 × ( G − Y ) @ 235.796° Chroma Vector = √ U² + V² Chroma Hue θ = aTan2(V,U) [Radians] If θ < 0 then add 2π.[360°] Decode: SyncDet U: B − Y = -┼- @ 0.000° ÷ 0.492111 V: R − Y = -┼- @ 90.000° ÷ 0.877283 W: G − Y = -┼- @ 235.796° ÷ 1.424415 (1.4244145537, 235.79647610°) or G − Y = −0.394642 × (B − Y) − 0.580622 × (R − Y) (−0.3946423068, −0.5806217020) These scaling factors are for the quadrature Chroma signal before the 0.492111 & 0.877283 unscaling factors are applied to the B−Y & R−Y axes respectively. -

Phase II: SAE J2931/1
PNNL-22161 Prepared for the U. S. Department of Energy under Contract DE-AC05-76RL01830 Electric Vehicle Communications Standards Testing and Validation - Phase II: SAE J2931/1 R Pratt K Gowri December 2012 DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC05-76RL01830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831-0062; ph: (865) 576-8401 fax: (865) 576-5728 email: [email protected] Available to the public from the National Technical Information Service, U.S. Department of Commerce, 5285 Port Royal Rd., Springfield, VA 22161 ph: (800) 553-6847 fax: (703) 605-6900 email: [email protected] online ordering: http://www.ntis.gov/ordering.htm This document was printed on recycled paper. -

Pilot-Aided Frame Synchronization in Optical OFDM Systems
applied sciences Article Pilot-Aided Frame Synchronization in Optical OFDM Systems Funmilayo B. Offiong 1,* , Sinan Sinanovi´c 2 and Wasiu O. Popoola 3 1 Department of Electronic and Electrical Engineering, Obafemi Awolowo University, Ile-Ife 220005, Nigeria 2 School of Engineering and Built Environment, Glasgow Caledonian University, Glasgow G4 0BA, UK; [email protected] 3 Institute for Digital Communications, University of Edinburgh, Edinburgh EH9 3JL, UK; [email protected] * Correspondence: fboffi[email protected] Received: 14 March 2019; Accepted: 27 April 2019; Published: 11 June 2020 Abstract: Efficient frame synchronization is essential for data recovery in communication systems. In this study, a single pilot sequence is used to achieve both frame synchronization and peak-to-average power ratio (PAPR) reduction. The two systems considered are direct-current biased optical orthogonal frequency division multiplexing (DCO-OFDM) and asymmetrically clipped O-OFDM (ACO-OFDM). The pilot symbol is allocated to odd indexed subcarriers only. Thus, the synchronization algorithm leverages the mirror symmetric property of the pilot symbol within a frame to detect the start of the pilot signal at the receiver. This scheme has low complexity and gives precise frame synchronization at signal-to-noise ratios as low as 4 dB in an indoor visible light communication (VLC) channel. Keywords: optical OFDM; pilot symbol; frame synchronization; symbol timing estimation; correlation-based method; optical wireless communication 1. Introduction Synchronization at the receiver of a practical orthogonal frequency division multiplexing (OFDM) system design is one of the most crucial data detection stages that must be performed accurately in order to avoid system performance degradation due to symbol timing and carrier frequency offset [1]. -

Analog Communications
ECE 342 Communication Theory Fall 2005, Class Notes Prof. Tiffany J Li www: http://www.eecs.lehigh.edu/∼jingli/teach email: [email protected] Analog Communications Modulation and Communication Systems • Modulation is a process that causes a shift in the range of frequencies in a signal. In effect, modulation converts the message signal from lowpass to bandpass. • Two types of communication systems. { Baseband communication: does not use modulation. ∗ The term baseband is used to designate the band of frequen- cies of the signal delivered by the source or the input transducer. { In telephony, the baseband is the audio band (band of voice signals) of 0 to 3.5kHz. { In television, the baseband is the video band occupying 0 to 4.3MHz. { For digital data or pulse-code modulation (PCM) using bipo- lar signaling at a rate Rb pulses per second, the baseband is 0 to Rb Hz. ∗ Baseband signals cannot be transmitted over a radio link but are suitable for transmission over a pair of wires, coaxial cables, or optical fibers. Examples include: { local telephony communication { short-haul PCM between two exchanges { long-distance PCM over optical fibers { Carrier communication: uses modulation. ∗ Eg: amplitude modulation, frequency modulation, phase mod- ulation. 1 ∗ A comment about pulse-modulated signals (including pulse amplitude modulation (PAM), pulse width modulation (PWM), pulse position modulation (PPM), pulse code modulation (PCM) and delta modulation (DM)): despite the term modulation, these signals are baseband signals. Pulse-modulation schemes are really baseband coding schemes, and they yield baseband signals. These signal must still modulate a carrier in order to shift their spectra. -

Baseband Transceiver Design of a High Definition Radio FM System Using Joint Theoretical Analysis and FPGA Implementation
Hindawi Publishing Corporation International Journal of Antennas and Propagation Volume 2014, Article ID 580479, 9 pages http://dx.doi.org/10.1155/2014/580479 Research Article Baseband Transceiver Design of a High Definition Radio FM System Using Joint Theoretical Analysis and FPGA Implementation Chien-Sheng Chen,1 Chyuan-Der Lu,2 Ho-Nien Shou,3 and Le-Wei Lin4 1 Department of Information Management, Tainan University of Technology, Tainan 710, Taiwan 2 Department of Finance, Tainan University of Technology, Tainan 710, Taiwan 3 Department of Aviation and Communication Electronics, Air Force Institute of Technology, Kaohsiung 820, Taiwan 4 Department of Electrical Engineering, National Cheng Kung University, Tainan 701, Taiwan Correspondence should be addressed to Chien-Sheng Chen; [email protected] Received 3 January 2014; Accepted 3 March 2014; Published 16 April 2014 Academic Editor: Chung-Liang Chang Copyright © 2014 Chien-Sheng Chen et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Advances in wireless communications have enabled various technologies for wireless digital communication. In the field of digital radio broadcasting, several specifications have been proposed, such as Eureka-147 and digital radio mondiale (DRM). These systems require a new spectrum assignment, which incurs heavy cost due to the depletion of the available spectrum. Therefore, the in-band on-channel (IBOC) system has been developed to work in the same band with the conventional analog radio and to provide digital broadcasting services. This paper discusses the function and algorithm of the high definition (HD) radio frequency modulation (FM) digital radio broadcasting system. -
The Effect and Compensation of Phase Noise on Orthogonal Frequency Division Multiplexing (OFDM) System
Circuits and Systems, 2018, 9, 107-115 http://www.scirp.org/journal/cs ISSN Online: 2153-1293 ISSN Print: 2153-1285 The Effect and Compensation of Phase Noise on Orthogonal Frequency Division Multiplexing (OFDM) System Yubin Lin Greater Atlanta Christian School, Norcross, Georgia, USA How to cite this paper: Lin, Y.B. (2018) Abstract The Effect and Compensation of Phase Noise on Orthogonal Frequency Division Orthogonal Frequency Division Multiplexing (OFDM) is characterized by its Multiplexing (OFDM) System. Circuits and high data rate. However, the modulation method used in the system is subject Systems, 9, 107-115. to the influence of phase noise due to the need of time synchronization. In https://doi.org/10.4236/cs.2018.97011 this paper, an algorithm based on MMSE (minimum mean square error) is Received: December 8, 2017 developed to compensate the influence of both the common phase error Accepted: July 27, 2018 (CPE) and inter carrier interference (ICI), which are two aspects of phase Published: July 30, 2018 noise, under common Gaussian white noise. The result of noise cancellation is Copyright © 2018 by author and presented in signal-to-noise ratio (SNR) and symbol error rate (SER). Like Scientific Research Publishing Inc. digital signal in general, SNR can reduce SER with or without phase noise This work is licensed under the Creative compensation. The compensation of phase noise significantly reduces the SER Commons Attribution International of the decoded signal. However, the bandwidth of phase noise still determines License (CC BY 4.0). http://creativecommons.org/licenses/by/4.0/ the signal accuracy. Under high bandwidth of phase noise, increasing SNR Open Access will only slightly increase SER, which is not efficient. -

DVB-T Pilot Sensing Algorithms David Cordero Díaz June 2010
End of degree project TELECOMUNICATION ENGINEERING DDVVBB--TT PILOT SENSING ALGORITHMS Linköping University Department of Electrical Engineering, Communication System Division Student: David Cordero Díaz Supervised by Danyo Danev Linköping, June 2010 Kommunikationssystem, ISY. Linköpings universitet. 581 83 LINKÖPING. Tel: 013-28 10 00. Fax: 013-13 92 82 DVB-T pilot sensing algorithms David Cordero Díaz June 2010 Abstract The world nowadays is in the middle of a digital to analog TV transition where digital transmission technology is substituting completely the analog television. This is because digital transmission has many advantages in terms of spectral efficiency, flexibility and robustness which make it especially attractive over analog transmission. Digital Video Broadcasting for Terrestrial (DVB-T) is the DVB European-based consortium standard for the broadcast transmission of digital terrestrial television. This system transmits compressed digital audio, video and other data over an MPEG-2 stream, using COFDM modulation. This paper deals with a C++ application currently being developed to simulate a DVB-T transmission in different real channels in order to test several pilot sensing algorithms, compare them and determine in which conditions and scenarios their use is more appropriated. Therefore an emitted DVB-T signal has been generated and detected after crossing a channel. Channel models and detection algorithms have been chosen from existing ones. All the blocs are implemented as specified in the DVB-T standard (ETSI EN 300 744 V1.6.1). Throughout this paper performance of DVB-T is defined and all the technical details needed to understand the application are explained. The application developed and its functions are described. -

Ofdm Systems
International Journal of Mobile Network Communications & Telematics (IJMNCT) Vol.1, No.2, December 2011 A FULL PERFORMANCE ANALYSIS OF CHANNEL ESTIMATION METHODS FOR TIME VARYING OFDM SYSTEMS Aida Zaier 1 and Ridha Bouallègue 2 1National Engineering School of Tunis, Tunis University, Tunisia, [email protected] 2 High School of Communications,Tunis Ariana, Tunisia [email protected] ABSTRACT In this paper, we have evaluated various methods of time-frequency-selective fading channels estimation in OFDM system and some of them improved under time varying conditions. So, these different techniques will be studied through different algorithms and for different schemes of modulations (16 QAM, BPSK, QPSK,…). Channel estimation gathers different schemes and algorithms, some of them are dedicated for slowly time varying (such as block type arrangement insertion, Bayesian Cramer-Rao Bound, Kalman estimator, Subspace estimator,…) whereas the others concern highly time varying channels (comb type insertion,…) . There are others methods that are just suitable for stationary channels like blind or semi blind estimators. For this aim, diverse algorithms were used for these schemes such as Least Squares estimator LS, Least Minimum Squares LMS, Minimum Mean-Square-ErrorMMSE, Linear Minimum Mean-Square-Error LMMSE, Maximum Likelihood ML,…to refine estimators shown previously. KEYWORDS OFDM Systems, Channel Estimation, Pilot arrangement, Blind estimation, Subspace LS, LMS, MMSE, LMMSE, ML 1. INTRODUCTION The increasing require for high-bit-rate digital mobile communications has incited the appearance of Orthogonal Frequency-Division Multiplexing (OFDM) for achieving good performance in high rate data transmission. It is also an effective technique that produces a high spectral efficiency and a good scheme to combat frequency-selective fading channels in wireless communication systems without forgetting the major property that is subcarrier orthogonality. -
MC13028A Advanced Wide Voltage IF and C-QUAM® AM Stereo Decoder
查询MC13028A/D供应商 捷多邦,专业PCB打样工厂,24小时加急出货 Order this document by MC13028A/D MC13028A Advanced Wide Voltage C–QUAM AM STEREO IF and C-QUAM AM ADVANCED WIDE VOLTAGE Stereo Decoder IF and DECODER for E.T.R. RADIOS The MC13028A is a third generation C–QUAM stereo decoder targeted for use in low voltage, low cost AM/FM E.T.R. radio applications. Advanced SEMICONDUCTOR features include a signal quality detector that analyzes signal strength, TECHNICAL DATA signal to noise ratio, and stereo pilot tone before switching to the stereo mode. A “blend function” much like FM stereo has been added to improve the transition from mono to stereo. The audio output level is adjustable to allow easy interface with a variety of AM/FM tuner chips. The external components have been minimized to keep the total system cost low. • Adjustable Audio Output Level 16 • Stereo Blend Function 1 • Stereo Threshold Adjustment • Operation from 2.2 V to 12 V Supply P SUFFIX PLASTIC PACKAGE • Precision Pilot Tone Detector CASE 648 • Forced Mono Function • Single Pinout VCO • IF Amplifier with IF AGC Circuit 16 • VCO Shutdown Mode at Weak Signal Condition 1 D SUFFIX The purchase of the Motorola C–QUAM AM Stereo Decoder does not carry with such pur- PLASTIC PACKAGE chase any license by implication, estoppel or otherwise, under any patent rights of Motorola or others covering any combination of this decoder with other elements including use in a CASE 751B radio receiver. Upon application by an interested party, licenses are available from Motorola (SO–16) on its patents applicable to AM Stereo radio receivers.