An Analysis of a Quadrature Double-Sideband/Frequency Modulated Communication System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Optical Single Sideband for Broadband and Subcarrier Systems
University of Alberta Optical Single Sideband for Broadband And Subcarrier Systems Robert James Davies 0 A thesis submitted to the faculty of Graduate Studies and Research in partial fulfillrnent of the requirernents for the degree of Doctor of Philosophy Department of Electrical And Computer Engineering Edmonton, AIberta Spring 1999 National Library Bibliothèque nationale du Canada Acquisitions and Acquisitions et Bibliographie Services services bibliographiques 395 Wellington Street 395, rue Wellington Ottawa ON KlA ON4 Ottawa ON KIA ON4 Canada Canada Yom iUe Votre relérence Our iSie Norre reference The author has granted a non- L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or sell reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or electronic formats. la forme de microfiche/nlm, de reproduction sur papier ou sur format électronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts fkom it Ni la thèse ni des extraits substantiels may be printed or otheMrise de celle-ci ne doivent être Unprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation. Abstract Radio systems are being deployed for broadband residential telecommunication services such as broadcast, wideband lntemet and video on demand. Justification for radio delivery centers on mitigation of problems inherent in subscriber loop upgrades such as Fiber to the Home (WH)and Hybrid Fiber Coax (HFC). -

Radio Communications in the Digital Age
Radio Communications In the Digital Age Volume 1 HF TECHNOLOGY Edition 2 First Edition: September 1996 Second Edition: October 2005 © Harris Corporation 2005 All rights reserved Library of Congress Catalog Card Number: 96-94476 Harris Corporation, RF Communications Division Radio Communications in the Digital Age Volume One: HF Technology, Edition 2 Printed in USA © 10/05 R.O. 10K B1006A All Harris RF Communications products and systems included herein are registered trademarks of the Harris Corporation. TABLE OF CONTENTS INTRODUCTION...............................................................................1 CHAPTER 1 PRINCIPLES OF RADIO COMMUNICATIONS .....................................6 CHAPTER 2 THE IONOSPHERE AND HF RADIO PROPAGATION..........................16 CHAPTER 3 ELEMENTS IN AN HF RADIO ..........................................................24 CHAPTER 4 NOISE AND INTERFERENCE............................................................36 CHAPTER 5 HF MODEMS .................................................................................40 CHAPTER 6 AUTOMATIC LINK ESTABLISHMENT (ALE) TECHNOLOGY...............48 CHAPTER 7 DIGITAL VOICE ..............................................................................55 CHAPTER 8 DATA SYSTEMS .............................................................................59 CHAPTER 9 SECURING COMMUNICATIONS.....................................................71 CHAPTER 10 FUTURE DIRECTIONS .....................................................................77 APPENDIX A STANDARDS -

Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10
EE447 Lecture 6 Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10 HW7;5-4,5-7,5-13a-d,5-23,5-31 Due next Monday, 29th 1 Figure 4–29 Superheterodyne receiver. m(t) 2 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 1 EE447 Lecture 6 Synchronous Demodulation s(t) LPF m(t) 2Cos(2πfct) •Only method for DSB-SC, USB-SC, LSB-SC •AM with carrier •Envelope Detection – Input SNR >~10 dB required •Synchronous Detection – (no threshold effect) •Note the 2 on the LO normalizes the output amplitude 3 Figure 4–24 PLL used for coherent detection of AM. 4 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 2 EE447 Lecture 6 Envelope Detector C • Ac • (1+ a • m(t)) Where C is a constant C • Ac • a • m(t)) 5 Envelope Detector Distortion Hi Frequency m(t) Slope overload IF Frequency Present in Output signal 6 3 EE447 Lecture 6 Superheterodyne Receiver EE445-09 7 8 4 EE447 Lecture 6 9 Super-Heterodyne AM Receiver 10 5 EE447 Lecture 6 Super-Heterodyne AM Receiver 11 RF Filter • Provides Image Rejection fimage=fLO+fif • Reduces amplitude of interfering signals far from the carrier frequency • Reduces the amount of LO signal that radiates from the Antenna stop 2/22 12 6 EE447 Lecture 6 Figure 4–30 Spectra of signals and transfer function of an RF amplifier in a superheterodyne receiver. 13 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. -
Of Single Sideband Demodulation by Richard Lyons
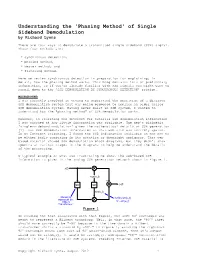
Understanding the 'Phasing Method' of Single Sideband Demodulation by Richard Lyons There are four ways to demodulate a transmitted single sideband (SSB) signal. Those four methods are: • synchronous detection, • phasing method, • Weaver method, and • filtering method. Here we review synchronous detection in preparation for explaining, in detail, how the phasing method works. This blog contains lots of preliminary information, so if you're already familiar with SSB signals you might want to scroll down to the 'SSB DEMODULATION BY SYNCHRONOUS DETECTION' section. BACKGROUND I was recently involved in trying to understand the operation of a discrete SSB demodulation system that was being proposed to replace an older analog SSB demodulation system. Having never built an SSB system, I wanted to understand how the "phasing method" of SSB demodulation works. However, in searching the Internet for tutorial SSB demodulation information I was shocked at how little information was available. The web's wikipedia 'single-sideband modulation' gives the mathematical details of SSB generation [1]. But SSB demodulation information at that web site was terribly sparse. In my Internet searching, I found the SSB information available on the net to be either badly confusing in its notation or downright ambiguous. That web- based material showed SSB demodulation block diagrams, but they didn't show spectra at various stages in the diagrams to help me understand the details of the processing. A typical example of what was frustrating me about the web-based SSB information is given in the analog SSB generation network shown in Figure 1. x(t) cos(ωct) + 90o 90o y(t) – sin(ωct) Meant to Is this sin(ω t) represent the c Hilbert or –sin(ωct) Transformer. -

FM Stereo Format 1
A brief history • 1931 – Alan Blumlein, working for EMI in London patents the stereo recording technique, using a figure-eight miking arrangement. • 1933 – Armstrong demonstrates FM transmission to RCA • 1935 – Armstrong begins 50kW experimental FM station at Alpine, NJ • 1939 – GE inaugurates FM broadcasting in Schenectady, NY – TV demonstrations held at World’s Fair in New York and Golden Gate Interna- tional Exhibition in San Francisco – Roosevelt becomes first U.S. president to give a speech on television – DuMont company begins producing television sets for consumers • 1942 – Digital computer conceived • 1945 – FM broadcast band moved to 88-108MHz • 1947 – First taped US radio network program airs, featuring Bing Crosby – 3M introduces Scotch 100 audio tape – Transistor effect demonstrated at Bell Labs • 1950 – Stereo tape recorder, Magnecord 1250, introduced • 1953 – Wireless microphone demonstrated – AM transmitter remote control authorized by FCC – 405-line color system developed by CBS with ”crispening circuits” to improve apparent picture resolution 1 – FCC reverses its decision to approve the CBS color system, deciding instead to authorize use of the color-compatible system developed by NTSC – Color TV broadcasting begins • 1955 – Computer hard disk introduced • 1957 – Laser developed • 1959 – National Stereophonic Radio Committee formed to decide on an FM stereo system • 1960 – Stereo FM tests conducted over KDKA-FM Pittsburgh • 1961 – Great Rose Bowl Hoax University of Washington vs. Minnesota (17-7) – Chevrolet Impala ‘Super Sport’ Convertible with 409 cubic inch V8 built – FM stereo transmission system approved by FCC – First live televised presidential news conference (John Kennedy) • 1962 – Philips introduces audio cassette tape player – The Beatles release their first UK single Love Me Do/P.S. -

NRSC-G202 FM IBOC Total Digital Sideband Power
NRSC GUIDELINE NATIONAL RADIO SYSTEMS COMMITTEE NRSC-G202-A FM IBOC Total Digital Sideband Power for Various Configurations April 2016 NAB: 1771 N Street, N.W. 1919 South Eads Street Washington, DC 20036 Arlington, VA 22202 Tel: 202-429-5356 Tel: 703-907-7660 Co-sponsored by the Consumer Technology Association and the National Association of Broadcasters http://www.nrscstandards.org NRSC GUIDELINE NATIONAL RADIO SYSTEMS COMMITTEE NRSC-G202-A FM IBOC Total Digital Sideband Power for Various Configurations April 2016 NAB: 1771 N Street, N.W. 1919 South Eads Street Washington, DC 20036 Arlington, VA 22202 Tel: 202-429-5356 Fax: 202-517-1617 Tel: 703-907-4366 Fax: 703-907-4158 Co-sponsored by the Consumer Technology Association and the National Association of Broadcasters http://www.nrscstandards.org NRSC-G202-A NOTICE NRSC Standards, Guidelines, Reports and other technical publications are designed to serve the public interest through eliminating misunderstandings between manufacturers and purchasers, facilitating interchangeability and improvement of products, and assisting the purchaser in selecting and obtaining with minimum delay the proper product for his particular need. Existence of such Standards, Guidelines, Reports and other technical publications shall not in any respect preclude any member or nonmember of the Consumer Technology Association (CTA) or the National Association of Broadcasters (NAB) from manufacturing or selling products not conforming to such Standards, Guidelines, Reports and other technical publications, nor shall the existence of such Standards, Guidelines, Reports and other technical publications preclude their voluntary use by those other than CTA or NAB members, whether to be used either domestically or internationally. -

E2L005 ROTCH a Day in the Life of the RF Spectrum
A Day in the Life of the RF Spectrum by James E. Cooley B.S., Computer Engineering Northwestern University (1999) Submitted to the Program of Media Arts and Sciences, School of Architecture and Planning, In partial fulfillment of the requirement for the degree of MASTER OF SCIENCE IN MEDIA ARTS AND SCIENCES at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY September 2005 © Massachusetts Institute of Technology, 2005. All rights reserved. Signature of Author: Program in Media Arts and Sciences August 5, 2005 Certified by: Andrew B. Lippman Senior Research Scientist of Media Arts and Sciences Program in Media Arts and Sciences Thesis Supervisor Accepted by: Andrew B. Lippman Chairman, Departmental Committee on Graduate Studies Program in Media Arts and Sciences tMASSACHUSETT NSE IT 'F TECHNOLOG Y E2L005 ROTCH A Day in the Life of the RF Spectrum by James E. Cooley Submitted to the Program of Media Arts and Sciences, School of Architecture and Planning, September 2005 in partial fulfillment of the requirement for the degree of Master of Science in Media Arts and Sciences Abstract There is a misguided perception that RF spectrum space is fully allocated and fully used though even a superficial study of actual spectrum usage by measuring local RF energy shows it largely empty of radiation. Traditional regulation uses a fence-off policy, in which competing uses are isolated by frequency and/or geography. We seek to modernize this strategy. Given advances in radio technology that can lead to fully cooperative broadcast, relay, and reception designs, we begin by studying the existing radio environment in a qualitative manner. -

Single-Sideband Modulation Based on an Injection-Locked DFB Laser
462 IEEE PHOTONICS TECHNOLOGY LETTERS, VOL. 22, NO. 7, APRIL 1, 2010 Single-Sideband Modulation Based on an Injection-Locked DFB Laser in Radio-Over-Fiber Systems Cheng Hong, Cheng Zhang, Mingjin Li, Lixin Zhu, Li Li, Weiwei Hu, Anshi Xu, and Zhangyuan Chen, Member, IEEE Abstract—We report an experimental demonstration of optical [5]. Stimulated Brillouin scattering effect in fiber can be intro- single-sideband (SSB) modulation in 60-GHz radio-over-fiber duced to amplify only one modulation sideband [6]. In [7], SSB systems based on an injection-locked distributed-feedback (DFB) modulation is realized by separating the two heterodyning op- laser. Two heterodyning optical modes with 60-GHz spacing tical modes, modulating only one mode, and combining them are injected into the DFB laser and one of them is used to lock the DFB laser. When the DFB laser is directly modulated, the again with an optical coupler. By changing the relative state modulation index of the locked mode is 15 dB larger than that of polarization between two heterodyning modes, SSB modu- of the unlocked one. The 2.5-Gb/s data transmission at 60 GHz lation could also be realized using a polarization-dependent op- is successfully achieved over 50-km standard single-mode fiber tical phase modulator without separating the two heterodyning using the proposed SSB scheme. modes [8]. Other methods for SSB modulation are investigated Index Terms—Distributed-feedback (DFB) laser, injec- too, such as using a nested Mach–Zehnder modulator (MZM) tion-locking, radio-over-fiber (RoF), single-sideband (SSB) [9], or vestigial sideband filtering in combination with optical modulation. -

Gear Wear Process Monitoring Using a Sideband Estimator Based on Modulation Signal Bispectrum
applied sciences Article Gear Wear Process Monitoring Using a Sideband Estimator Based on Modulation Signal Bispectrum Ruiliang Zhang 1, Xi Gu 2,*, Fengshou Gu 1,3, Tie Wang 1 and Andrew D. Ball 3 1 School of Mechanical Engineering, Taiyuan University of Technology, Taiyuan 030024, China; [email protected] (R.Z.); [email protected] (F.G.); [email protected] (T.W.) 2 School of Electronic Engineering, Bangor College Changsha, Central South University of Forestry and Technology, Changsha 410004, China 3 Centre for Efficiency and Performance Engineering, University of Huddersfield, Queensgate, Huddersfield HD1 3DH, UK; [email protected] * Correspondence: [email protected]; Tel.: +86-151-1120-3803 Academic Editor: David He Received: 6 February 2017; Accepted: 8 March 2017; Published: 10 March 2017 Abstract: As one of the most common gear failure modes, tooth wear can produce nonlinear modulation sidebands in the vibration frequency spectrum. However, limited research has been reported in monitoring the gear wear based on vibration due to the lack of tools which can effectively extract the small sidebands. In order to accurately monitor gear wear progression in a timely fashion, this paper presents a gear wear condition monitoring approach based on vibration signal analysis using the modulation signal bispectrum-based sideband estimator (MSB-SE) method. The vibration signals are collected using a run-to-failure test of gearbox under an accelerated test process. MSB analysis was performed on the vibration signals to extract the sideband information. Using a combination of the peak value of MSB-SE and the coherence of MSB-SE, the overall information of gear transmission system can be obtained. -
A Muiti-Mode Modulation and Demodulation System and Method
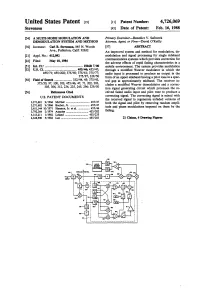
United States Patent [191 [11] Patent Number: 4,726,069 Stevenson [45] Date of Patent: Feb. 16, 1988 [54] A MUITI-MODE MODULATION AND Primary Examiner-Benedict V. Safourek DEMODULATION SYSTEM AND METHOD Attorney, Agent, or Firm-David O'Reilly [76] Inventor: Carl R. Stevenson, 845 N. Woods [571 ABSTRACT Ave., Fullerton, Calif. 92632 An improved system and method for modulation, de- [21] Appl. No.: 6l2,092 modulation and signal processing for single sideband communications systems which provides correction for [22] Filed. May 18,l984 the adverse effects of rapid fading characteristics in a [51] Int. c1.4 ............................................... H04B 7/00 mobile environment. The system provides modulation [52] US. c1. ........................................ 455/46; 455/47; through a modified Weaver modulator in which the 455/71; 455/202; 375/50; 375/61; 375/77; audio input is processed to produce an output in the 375/97; 329/50 form of an upper sideband having a pilot tone in a spec- [58] Field of Search ...................... 332/44, 45; 375/43, tral gap at approximately midband. The receiver in- 375/50,97, 100, 102; 455/46,47, 71, 202, 203, cludes a modified Weaver demodulator and a correc- 305, 306, 312,234, 235,245,296; 329/50 tion signal generating circuit which processes the re- t561 References Cited ceived faded audio input and pilot tone to produce a U.S. PATENT DOCUMENTS correcting signal. The correcting signal is mixed with the received signal to regenerate unfaded versions of 3,271,681 9/1966 MCN& ................................. 455147 both the signal and pilot by removing random ampli- 3,271,682 9/1966 Bucher, Jr. -

IQ, Image Reject, & Single Sideband Mixer Primer
ICROWA M VE KI , R IN A C . M . S 1 H IQ, IMAGE REJECT 9 A 9 T T 1 E E R C I N N I G & single sideband S P S E R R E F I O R R R M A A B N E C Mixer Primer Input Isolated By: Doug Jorgesen introduction Double Sideband Available P Bandwidth Wireless communication and radar systems are under continuous pressure to reduce size, weight, and power while increasing dynamic range and bandwidth. The quest for higher performance in a smaller 1A) Double IF I R package motivates the use of IQ mixers: mixers that can simultaneously mix ‘in-phase’ and ‘quadrature’ Sided L P components (sometimes called complex mixers). System designers use IQ mixers to eliminate or relax the Upconversion ( ) ( ) f Filter Filtered requirements for filters, which are typically the largest and most expensive components in RF & microwave Sideband system designs. IQ mixers use phase manipulation to suppress signals instead of bulky, expensive filters. LO푎 푡@F푏LO1푡 FLO1 The goal of this application note is to introduce IQ, single sideband (SSB), and image reject (IR) mixers in both theory and practice. We will discuss basic applications, the concepts behind them, and practical Single Sideband considerations in their selection and use. While we will focus on passive diode mixers (of the type Marki Mixer I R sells), the concepts are generally applicable to all types of IQ mixers and modulators. P 0˚ L 1B) Single IF 0˚ P Sided Suppressed Upconversion I. What can an IQ mixer do for you? 90˚ Sideband ( ) ( ) f 90˚ We’ll start with a quick example of what a communication system looks like using a traditional mixer, a L I R F single sideband mixer (SSB), and an IQ mixer. -
![Arxiv:1306.0942V2 [Cond-Mat.Mtrl-Sci] 7 Jun 2013](https://docslib.b-cdn.net/cover/1341/arxiv-1306-0942v2-cond-mat-mtrl-sci-7-jun-2013-1331341.webp)
Arxiv:1306.0942V2 [Cond-Mat.Mtrl-Sci] 7 Jun 2013
Bipolar electrical switching in metal-metal contacts Gaurav Gandhi1, a) and Varun Aggarwal1, b) mLabs, New Delhi, India Electrical switching has been observed in carefully designed metal-insulator-metal devices built at small geometries. These devices are also commonly known as mem- ristors and consist of specific materials such as transition metal oxides, chalcogenides, perovskites, oxides with valence defects, or a combination of an inert and an electro- chemically active electrode. No simple physical device has been reported to exhibit electrical switching. We have discovered that a simple point-contact or a granu- lar arrangement formed of metal pieces exhibits bipolar switching. These devices, referred to as coherers, were considered as one-way electrical fuses. We have identi- fied the state variable governing the resistance state and can program the device to switch between multiple stable resistance states. Our observations render previously postulated thermal mechanisms for their resistance-change as inadequate. These de- vices constitute the missing canonical physical implementations for memristor, often referred as the fourth passive element. Apart from the theoretical advance in un- derstanding metallic contacts, the current discovery provides a simple memristor to physicists and engineers for widespread experimentation, hitherto impossible. arXiv:1306.0942v2 [cond-mat.mtrl-sci] 7 Jun 2013 a)Electronic mail: [email protected] b)Electronic mail: [email protected] 1 I. INTRODUCTION Leon Chua defines a memristor as any two-terminal electronic device that is devoid of an internal power-source and is capable of switching between two resistance states upon application of an appropriate voltage or current signal that can be sensed by applying a relatively much smaller sensing signal1.