An Introduction to Deep Morphological Networks Keiller Nogueira, Jocelyn Chanussot, Fellow, IEEE, Mauro Dalla Mura, Senior, IEEE, Jefersson A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lecture 5: Binary Morphology
Lecture 5: Binary Morphology c Bryan S. Morse, Brigham Young University, 1998–2000 Last modified on January 15, 2000 at 3:00 PM Contents 5.1 What is Mathematical Morphology? ................................. 1 5.2 Image Regions as Sets ......................................... 1 5.3 Basic Binary Operations ........................................ 2 5.3.1 Dilation ............................................. 2 5.3.2 Erosion ............................................. 2 5.3.3 Duality of Dilation and Erosion ................................. 3 5.4 Some Examples of Using Dilation and Erosion . .......................... 3 5.5 Proving Properties of Mathematical Morphology .......................... 3 5.6 Hit-and-Miss .............................................. 4 5.7 Opening and Closing .......................................... 4 5.7.1 Opening ............................................. 4 5.7.2 Closing ............................................. 5 5.7.3 Properties of Opening and Closing ............................... 5 5.7.4 Applications of Opening and Closing .............................. 5 Reading SH&B, 11.1–11.3 Castleman, 18.7.1–18.7.4 5.1 What is Mathematical Morphology? “Morphology” can literally be taken to mean “doing things to shapes”. “Mathematical morphology” then, by exten- sion, means using mathematical principals to do things to shapes. 5.2 Image Regions as Sets The basis of mathematical morphology is the description of image regions as sets. For a binary image, we can consider the “on” (1) pixels to all comprise a set of values from the “universe” of pixels in the image. Throughout our discussion of mathematical morphology (or just “morphology”), when we refer to an image A, we mean the set of “on” (1) pixels in that image. The “off” (0) pixels are thus the set compliment of the set of on pixels. By Ac, we mean the compliment of A,or the off (0) pixels. -
Hit-Or-Miss Transform
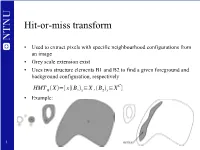
Hit-or-miss transform • Used to extract pixels with specific neighbourhood configurations from an image • Grey scale extension exist • Uses two structure elements B1 and B2 to find a given foreground and background configuration, respectively C HMT B X={x∣B1x⊆X ,B2x⊆X } • Example: 1 Morphological Image Processing Lecture 22 (page 1) 9.4 The hit-or-miss transformation Illustration... Morphological Image Processing Lecture 22 (page 2) Objective is to find a disjoint region (set) in an image • If B denotes the set composed of X and its background, the• match/hit (or set of matches/hits) of B in A,is A B =(A X) [Ac (W X)] ¯∗ ª ∩ ª − Generalized notation: B =(B1,B2) • Set formed from elements of B associated with B1: • an object Set formed from elements of B associated with B2: • the corresponding background [Preceeding discussion: B1 = X and B2 =(W X)] − More general definition: • c A B =(A B1) [A B2] ¯∗ ª ∩ ª A B contains all the origin points at which, simulta- • ¯∗ c neously, B1 found a hit in A and B2 found a hit in A Hit-or-miss transform C HMT B X={x∣B1x⊆X ,B2x⊆X } • Can be written in terms of an intersection of two erosions: HMT X= X∩ X c B B1 B2 2 Hit-or-miss transform • Simple example usages - locate: – Isolated foreground pixels • no neighbouring foreground pixels – Foreground endpoints • one or zero neighbouring foreground pixels – Multiple foreground points • pixels having more than two neighbouring foreground pixels – Foreground contour points • pixels having at least one neighbouring background pixel 3 Hit-or-miss transform example • Locating 4-connected endpoints SEs for 4-connected endpoints Resulting Hit-or-miss transform 4 Hit-or-miss opening • Objective: keep all points that fit the SE. -

Introduction to Mathematical Morphology
COMPUTER VISION, GRAPHICS, AND IMAGE PROCESSING 35, 283-305 (1986) Introduction to Mathematical Morphology JEAN SERRA E. N. S. M. de Paris, Paris, France Received October 6,1983; revised March 20,1986 1. BACKGROUND As we saw in the foreword, there are several ways of approaching the description of phenomena which spread in space, and which exhibit a certain spatial structure. One such approach is to consider them as objects, i.e., as subsets of their space of definition. The method which derives from this point of view is. called mathematical morphology [l, 21. In order to define mathematical morphology, we first require some background definitions. Consider an arbitrary space (or set) E. The “objects” of this :space are the subsets X c E; therefore, the family that we have to handle theoretically is the set 0 (E) of all the subsets X of E. The set p(E) is incomparably less arbitrary than E itself; indeed it is constructured to be a Boolean algebra [3], that is: (i) p(E) is a complete lattice, i.e., is provided with a partial-ordering relation, called inclusion, and denoted by “ c .” Moreover every (finite or not) family of members Xi E p(E) has a least upper bound (their union C/Xi) and a greatest lower bound (their intersection f7 X,) which both belong to p(E); (ii) The lattice p(E) is distributiue, i.e., xu(Ynz)=(XuY)n(xuZ) VX,Y,ZE b(E) and is complemented, i.e., there exist a greatest set (E itself) and a smallest set 0 (the empty set) such that every X E p(E) possesses a complement Xc defined by the relationships: XUXC=E and xn xc= 0. -

M-Idempotent and Self-Dual Morphological Filters ا
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 4, APRIL 2012 805 Short Papers___________________________________________________________________________________________________ M-Idempotent and Self-Dual and morphological filters (opening and closing, alternating filters, Morphological Filters alternating sequential filters (ASF)). The quest for self-dual and/or idempotent operators has been the focus of many investigators. We refer to some important work Nidhal Bouaynaya, Member, IEEE, in the area in chronological order. A morphological operator that is Mohammed Charif-Chefchaouni, and idempotent and self-dual has been proposed in [28] by using the Dan Schonfeld, Fellow, IEEE notion of the middle element. The middle element, however, can only be obtained through repeated (possibly infinite) iterations. Meyer and Serra [19] established conditions for the idempotence of Abstract—In this paper, we present a comprehensive analysis of self-dual and the class of the contrast mappings. Heijmans [8] proposed a m-idempotent operators. We refer to an operator as m-idempotent if it converges general method for the construction of morphological operators after m iterations. We focus on an important special case of the general theory of that are self-dual, but not necessarily idempotent. Heijmans and lattice morphology: spatially variant morphology, which captures the geometrical Ronse [10] derived conditions for the idempotence of the self-dual interpretation of spatially variant structuring elements. We demonstrate that every annular operator, in which case it will be called an annular filter. increasing self-dual morphological operator can be viewed as a morphological An alternative framework for morphological image processing that center. Necessary and sufficient conditions for the idempotence of morphological operators are characterized in terms of their kernel representation. -
Morphological Image Compression Using Skeletons
Morphological Image Compression using Skeletons Nimrod Peleg Update: March 2008 What is Mathematical Morphology ? “... a theory for analysis of spatial structures which was initiated by George Matheron and Jean Serra. It is called Morphology since it aims at the analyzing the shape and the forms of the objects. It is Mathematical in the sense that the analysis is based on set theory, topology, lattice, random functions, etc. “ (Serra and Soille, 1994). Basic Operation: Dilation • Dilation: replacing every pixel with the maximum value of its neighborhood determined by the structure element (SE) X B x b|, x X b B Original SE Dilation Dilation demonstration Original Figure Dilated Image With Circle SE Dilation example Dilation (Israel Map, circle SE): Basic Operation: Erosion • Erosion: A Dual operation - replacing every pixel with the minimum value of its neighborhood determined by the SE C XBXB C Original SE Erosion Erosion demonstration Original Figure Eroded Image With Circle SE Erosion example Erosion (Lena, circle SE): Original B&W Lena Eroded Lena, SE radius = 4 Composed Operations: Opening • Opening: Erosion and than Dilation removes positive peaks narrower than the SE XBXBB () Original SE Opening Opening demonstration Original Figure Opened Image With Circle SE Opening example Opening (Lena, circle SE): Original B&W Lena Opened Lena, SE radius = 4 Composed Operations: Closing • Closing: Dilation and than Erosion removes negative peaks narrower than the SE XBXBB () Original SE Closing Closing demonstration Original Figure Closed Image With Circle SE Closing example • Closing (Lena, circle SE): Original B&W Lena Closed Lena, SE radius = 4 Cleaning “white” noise Opening & Closing Cleaning “black” noise Closing & Opening Conditioned dilation Y ()()XXBY • Example: Original Figure Opened Figure By Circle SE Conditioned Dilated Figure Opening By Reconstruction Rec( mask , kernel ) lim( mask ( kernel )) n n • Open by rec. -
Computer Vision – A
CS4495 Computer Vision – A. Bobick Morphology CS 4495 Computer Vision Binary images and Morphology Aaron Bobick School of Interactive Computing CS4495 Computer Vision – A. Bobick Morphology Administrivia • PS7 – read about it on Piazza • PS5 – grades are out. • Final – Dec 9 • Study guide will be out by Thursday hopefully sooner. CS4495 Computer Vision – A. Bobick Morphology Binary Image Analysis Operations that produce or process binary images, typically 0’s and 1’s • 0 represents background • 1 represents foreground 00010010001000 00011110001000 00010010001000 Slides: Linda Shapiro CS4495 Computer Vision – A. Bobick Morphology Binary Image Analysis Used in a number of practical applications • Part inspection • Manufacturing • Document processing CS4495 Computer Vision – A. Bobick Morphology What kinds of operations? • Separate objects from background and from one another • Aggregate pixels for each object • Compute features for each object CS4495 Computer Vision – A. Bobick Morphology Example: Red blood cell image • Many blood cells are separate objects • Many touch – bad! • Salt and pepper noise from thresholding • How useable is this data? CS4495 Computer Vision – A. Bobick Morphology Results of analysis • 63 separate objects detected • Single cells have area about 50 • Noise spots • Gobs of cells CS4495 Computer Vision – A. Bobick Morphology Useful Operations • Thresholding a gray-scale image • Determining good thresholds • Connected components analysis • Binary mathematical morphology • All sorts of feature extractors, statistics (area, centroid, circularity, …) CS4495 Computer Vision – A. Bobick Morphology Thresholding • Background is black • Healthy cherry is bright • Bruise is medium dark • Histogram shows two cherry regions (black background has been removed) Pixel counts Pixel 0 Grayscale values 255 CS4495 Computer Vision – A. Bobick Morphology Histogram-Directed Thresholding • How can we use a histogram to separate an image into 2 (or several) different regions? Is there a single clear threshold? 2? 3? CS4495 Computer Vision – A. -

Mathematical Morphology
Mathematical morphology Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/˜hlavac, [email protected] Outline of the talk: Point sets. Morphological transformation. Skeleton. Erosion, dilation, properties. Thinning, sequential thinning. Opening, closing, hit or miss. Distance transformation. Morphology is a general concept 2/55 In biology: the analysis of size, shape, inner structure (and relationship among them) of animals, plants and microorganisms. In linguistics: analysis of the inner structure of word forms. In materials science: the study of shape, size, texture and thermodynamically distinct phases of physical objects. In signal/image processing: mathematical morphology – a theoretical model based on lattice theory used for signal/image preprocessing, segmentation, etc. Mathematical morphology, introduction 3/55 Mathematical morphology (MM): is a theory for analysis of planar and spatial structures; is suitable for analyzing the shape of objects; is based on a set theory, integral algebra and lattice algebra; is successful due to a a simple mathematical formalism, which opens a path to powerful image analysis tools. The morphological way . The key idea of morphological analysis is extracting knowledge from the relation of an image and a simple, small probe (called the structuring element), which is a predefined shape. It is checked in each pixel, how does this shape matches or misses local shapes in the image. MM founding fathers 4/55 Georges Matheron (∗ 1930, † 2000) Jean Serra (∗ 1940) Matheron, G. Elements pour une Theorie del Milieux Poreux Masson, Paris, 1967. Serra, J. Image Analysis and Mathematical Morphology, Academic Press, London 1982. -

Morphological Image Processing
Digital Image Processing MORPHOLOGICAL Hamid R. Rabiee Fall 2015 Image Analysis 2 Morphological Image Processing Edge Detection Keypoint Detection Image Feature Extraction Texture Image Analysis Shape Analysis Color Image Processing Template Matching Image Segmentation Image Analysis 3 Figure 9.1 of Jain book Image Analysis 4 Ultimate aim of image processing applications: Automatic description, interpretation, or understanding the scene For example, an image understanding system should be able to send the report: The field of view contains a dirt road surrounded by grass. Image Analysis 5 Table 9.1 of Jain book Image Analysis 6 original binary erosion dilation opening closing Morphological Analysis Edge Detection Keypoint Detection 7 Morphological Image Processing (MIP) Outline 8 Preview Preliminaries Dilation Erosion Opening Closing Hit-or-miss transformation Outline (cont.) 9 Morphological algorithms Boundary Extraction Hole filling Extraction of connected components Convex hall Thinning Thickening Skeleton Outline (cont.) 10 Gray-scale morphology Dilation and erosion Opening and closing Rank filter, median filter, and majority filter Preview 11 Mathematical morphology a tool for extracting image components that are useful in the representation and description of region shape, such as boundaries, skeletons, and convex hull Can be used to extract attributes and “meaning” from images, unlike pervious image processing tools which their input and output were images. Morphological techniques such as morphological -

Revised Mathematical Morphological Concepts
Advances in Pure Mathematics, 2015, 5, 155-161 Published Online March 2015 in SciRes. http://www.scirp.org/journal/apm http://dx.doi.org/10.4236/apm.2015.54019 Revised Mathematical Morphological Concepts Joseph Ackora-Prah, Yao Elikem Ayekple, Robert Kofi Acquah, Perpetual Saah Andam, Eric Adu Sakyi, Daniel Gyamfi Department of Mathematics, Kwame Nkrumah University of Science and Technology, Kumasi, Ghana Email: [email protected], [email protected], [email protected], [email protected], [email protected], [email protected] Received 17 February 2015; accepted 12 March 2015; published 23 March 2015 Copyright © 2015 by authors and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/ Abstract We revise some mathematical morphological operators such as Dilation, Erosion, Opening and Closing. We show proofs of our theorems for the above operators when the structural elements are partitioned. Our results show that structural elements can be partitioned before carrying out morphological operations. Keywords Mathematical Morphology, Dilation, Erosion, Opening, Closing 1. Introduction Mathematical morphology is the theory and technique for the analysis and processing of geometrical structures, based on set theory, lattice theory, topology, and random functions. We consider classical mathematical mor- phology as a field of nonlinear geometric image analysis, developed initially by Matheron [1], Serra [2] and their collaborators, which is applied successfully to geological and biomedical problems of image analysis. The basic morphological operators were developed first for binary images based on set theory [1] [2] inspired by the work of Minkowski [3] and Hadwiger [4]. -

Blood Vessels Extraction Using Mathematical Morphology
Journal of Computer Science 9 (10): 1389-1395, 2013 ISSN: 1549-3636 © 2013 Science Publications doi:10.3844/jcssp.2013.1389.1395 Published Online 9 (10) 2013 (http://www.thescipub.com/jcs.toc) BLOOD VESSELS EXTRACTION USING MATHEMATICAL MORPHOLOGY 1Nidhal Khdhair El Abbadi and 2Enas Hamood Al Saadi 1Department of Computer Science, University of Kufa, Najaf, Iraq 2Department of Computer Science, University of Babylon, Babylon, Iraq Received 2013-07-10, Revised 2013-09-11; Accepted 2013-09-12 ABSTRACT The retinal vasculature is composed of the arteries and veins with their tributaries which are visible within the retinal image. The segmentation and measurement of the retinal vasculature is of primary interest in the diagnosis and treatment of a number of systemic and ophthalmologic conditions. The accurate segmentation of the retinal blood vessels is often an essential prerequisite step in the identification of retinal anatomy and pathology. In this study, we present an automated approach for blood vessels extraction using mathematical morphology. Two main steps are involved: enhancement operation is applied to the original retinal image in order to remove the noise and increase contrast of retinal blood vessels and morphology operations are employed to extract retinal blood vessels. This operation of segmentation is applied to binary image of top- hat transformation. The result was compared with other algorithms and give better results. Keywords: Blood Vessels, Diabetic, Retina, Segmentation, Image Enhancement 1. NTRODUCTION after 15 years of diabetes. DR patients perceive no symptoms until visual loss develops which happens Diabetes is the commonest cause of blindness in the usually in the later disease stages, when the treatment is working age group in the developed world. -

International Journal of Advance Engineering and Research Development Volume 1, Issue 12, December -2014
Scientific Journal of Impact Factor (SJIF): 3.134 ISSN (Online): 2348-4470 ISSN (Print) : 2348-6406 International Journal of Advance Engineering and Research Development Volume 1, Issue 12, December -2014 A Survey Report on Hit-or-Miss Transformation Wala Riddhi Ashokbhai1 Department of Computer Engineering, Darshan Institute of Engineering and Technology, Rajkot, Gujarat, India [email protected] Abstract- Hit or miss is a field of morphological digital image processing which is basically used to detect shape of regular as well as irregular objects. Initially, it was defined for binary images, as a morphological approach to the problem of template matching, but can be extended for gray scale images. For gray-scale it has been debatable, leading to multiple definitions that have been only recently unified by means of a similar theoretical foundation. Various structuring elements are used which are disjoint by nature in order to determine the output. Many authors have proposed newer versions of the original binary HMT so that it can be applied to gray-scale data. Hit or miss transformation operation takes a binary image as input and a kernel (also known as structuring element), and the result is another binary image as output. Main motive of this survey is to use Hit-or-miss transformation in order to detect various features in a given image. Keywords-Hit-and-Miss transform, Hit-or-miss transformation, Morphological image technology, digital image processing, HMT I. INTRODUCTION The hit-or-miss transform (HMT) is a powerful morphological technique that was among the initial morphological transforms developed by Serra (1982) and Matheron (1975). -

Meddle Detection Based on Morphological Opening
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 13, Number 3 (2018) Spl. © Research India Publications. http://www.ripublication.com 1 Meddle Detection Based on Morphological Opening NISHA AB1 AND DR.SASIGOPALAN2 1Department of Mathematics Cochin University of Science and Technology Thrikkakara, Kerala, India. [email protected] 2 School of Engineering, Cochin University of Science and Technology Kerala, India. [email protected] Abstract—Modish technological methods and II. FUNDAMENTAL OPERATORS IN easily accessible image processing softwares can MATHEMATICAL MORPHOLOGY manipulate images without leaving any trace 1 2 of meddling.So the methods to check the au- Consider two complete lattices[1] LC and LC thenticity of photographs are emerged as a new with a partial order relation ≤ greatest lower field of research.Interposing is normally done in bound_ and least upper bound ^. Let F be the 1 2 medical images in order to produce false proof set of all mappings from LC to LC and G be the 2 1 to claim insurance benefits. In this paper a new set of all mappings from LC to LC 1 2 technique using morphological opening based F = ff=f : LC −! LC g , 2 1 on complete lattices is discussed.This provides G = ff=f : LC −! LC g The complete lattice 2 a futuristic method to enhance the security of structure of LC can be spread out to F and the 1 digital images. structure of LC can be spread out to G For,let f1; f2 2 F Index Terms—opening,closing,morphological 1 f1 ≤ f2 , f1(x) ≤ f2(X), 8X 2 LC where≤ is appendage, idempotence 2 a partial order relation on LC .