M-Idempotent and Self-Dual Morphological Filters ا
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Semiring Frameworks and Algorithms for Shortest-Distance Problems
Journal of Automata, Languages and Combinatorics u (v) w, x–y c Otto-von-Guericke-Universit¨at Magdeburg Semiring Frameworks and Algorithms for Shortest-Distance Problems Mehryar Mohri AT&T Labs – Research 180 Park Avenue, Rm E135 Florham Park, NJ 07932 e-mail: [email protected] ABSTRACT We define general algebraic frameworks for shortest-distance problems based on the structure of semirings. We give a generic algorithm for finding single-source shortest distances in a weighted directed graph when the weights satisfy the conditions of our general semiring framework. The same algorithm can be used to solve efficiently clas- sical shortest paths problems or to find the k-shortest distances in a directed graph. It can be used to solve single-source shortest-distance problems in weighted directed acyclic graphs over any semiring. We examine several semirings and describe some specific instances of our generic algorithms to illustrate their use and compare them with existing methods and algorithms. The proof of the soundness of all algorithms is given in detail, including their pseudocode and a full analysis of their running time complexity. Keywords: semirings, finite automata, shortest-paths algorithms, rational power series Classical shortest-paths problems in a weighted directed graph arise in various contexts. The problems divide into two related categories: single-source shortest- paths problems and all-pairs shortest-paths problems. The single-source shortest-path problem in a directed graph consists of determining the shortest path from a fixed source vertex s to all other vertices. The all-pairs shortest-distance problem is that of finding the shortest paths between all pairs of vertices of a graph. -

Lecture 5: Binary Morphology
Lecture 5: Binary Morphology c Bryan S. Morse, Brigham Young University, 1998–2000 Last modified on January 15, 2000 at 3:00 PM Contents 5.1 What is Mathematical Morphology? ................................. 1 5.2 Image Regions as Sets ......................................... 1 5.3 Basic Binary Operations ........................................ 2 5.3.1 Dilation ............................................. 2 5.3.2 Erosion ............................................. 2 5.3.3 Duality of Dilation and Erosion ................................. 3 5.4 Some Examples of Using Dilation and Erosion . .......................... 3 5.5 Proving Properties of Mathematical Morphology .......................... 3 5.6 Hit-and-Miss .............................................. 4 5.7 Opening and Closing .......................................... 4 5.7.1 Opening ............................................. 4 5.7.2 Closing ............................................. 5 5.7.3 Properties of Opening and Closing ............................... 5 5.7.4 Applications of Opening and Closing .............................. 5 Reading SH&B, 11.1–11.3 Castleman, 18.7.1–18.7.4 5.1 What is Mathematical Morphology? “Morphology” can literally be taken to mean “doing things to shapes”. “Mathematical morphology” then, by exten- sion, means using mathematical principals to do things to shapes. 5.2 Image Regions as Sets The basis of mathematical morphology is the description of image regions as sets. For a binary image, we can consider the “on” (1) pixels to all comprise a set of values from the “universe” of pixels in the image. Throughout our discussion of mathematical morphology (or just “morphology”), when we refer to an image A, we mean the set of “on” (1) pixels in that image. The “off” (0) pixels are thus the set compliment of the set of on pixels. By Ac, we mean the compliment of A,or the off (0) pixels. -
Hit-Or-Miss Transform
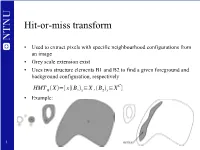
Hit-or-miss transform • Used to extract pixels with specific neighbourhood configurations from an image • Grey scale extension exist • Uses two structure elements B1 and B2 to find a given foreground and background configuration, respectively C HMT B X={x∣B1x⊆X ,B2x⊆X } • Example: 1 Morphological Image Processing Lecture 22 (page 1) 9.4 The hit-or-miss transformation Illustration... Morphological Image Processing Lecture 22 (page 2) Objective is to find a disjoint region (set) in an image • If B denotes the set composed of X and its background, the• match/hit (or set of matches/hits) of B in A,is A B =(A X) [Ac (W X)] ¯∗ ª ∩ ª − Generalized notation: B =(B1,B2) • Set formed from elements of B associated with B1: • an object Set formed from elements of B associated with B2: • the corresponding background [Preceeding discussion: B1 = X and B2 =(W X)] − More general definition: • c A B =(A B1) [A B2] ¯∗ ª ∩ ª A B contains all the origin points at which, simulta- • ¯∗ c neously, B1 found a hit in A and B2 found a hit in A Hit-or-miss transform C HMT B X={x∣B1x⊆X ,B2x⊆X } • Can be written in terms of an intersection of two erosions: HMT X= X∩ X c B B1 B2 2 Hit-or-miss transform • Simple example usages - locate: – Isolated foreground pixels • no neighbouring foreground pixels – Foreground endpoints • one or zero neighbouring foreground pixels – Multiple foreground points • pixels having more than two neighbouring foreground pixels – Foreground contour points • pixels having at least one neighbouring background pixel 3 Hit-or-miss transform example • Locating 4-connected endpoints SEs for 4-connected endpoints Resulting Hit-or-miss transform 4 Hit-or-miss opening • Objective: keep all points that fit the SE. -

Introduction to Mathematical Morphology
COMPUTER VISION, GRAPHICS, AND IMAGE PROCESSING 35, 283-305 (1986) Introduction to Mathematical Morphology JEAN SERRA E. N. S. M. de Paris, Paris, France Received October 6,1983; revised March 20,1986 1. BACKGROUND As we saw in the foreword, there are several ways of approaching the description of phenomena which spread in space, and which exhibit a certain spatial structure. One such approach is to consider them as objects, i.e., as subsets of their space of definition. The method which derives from this point of view is. called mathematical morphology [l, 21. In order to define mathematical morphology, we first require some background definitions. Consider an arbitrary space (or set) E. The “objects” of this :space are the subsets X c E; therefore, the family that we have to handle theoretically is the set 0 (E) of all the subsets X of E. The set p(E) is incomparably less arbitrary than E itself; indeed it is constructured to be a Boolean algebra [3], that is: (i) p(E) is a complete lattice, i.e., is provided with a partial-ordering relation, called inclusion, and denoted by “ c .” Moreover every (finite or not) family of members Xi E p(E) has a least upper bound (their union C/Xi) and a greatest lower bound (their intersection f7 X,) which both belong to p(E); (ii) The lattice p(E) is distributiue, i.e., xu(Ynz)=(XuY)n(xuZ) VX,Y,ZE b(E) and is complemented, i.e., there exist a greatest set (E itself) and a smallest set 0 (the empty set) such that every X E p(E) possesses a complement Xc defined by the relationships: XUXC=E and xn xc= 0. -

A Guide to Self-Distributive Quasigroups, Or Latin Quandles
A GUIDE TO SELF-DISTRIBUTIVE QUASIGROUPS, OR LATIN QUANDLES DAVID STANOVSKY´ Abstract. We present an overview of the theory of self-distributive quasigroups, both in the two- sided and one-sided cases, and relate the older results to the modern theory of quandles, to which self-distributive quasigroups are a special case. Most attention is paid to the representation results (loop isotopy, linear representation, homogeneous representation), as the main tool to investigate self-distributive quasigroups. 1. Introduction 1.1. The origins of self-distributivity. Self-distributivity is such a natural concept: given a binary operation on a set A, fix one parameter, say the left one, and consider the mappings ∗ La(x) = a x, called left translations. If all such mappings are endomorphisms of the algebraic structure (A,∗ ), the operation is called left self-distributive (the prefix self- is usually omitted). Equationally,∗ the property says a (x y) = (a x) (a y) ∗ ∗ ∗ ∗ ∗ for every a, x, y A, and we see that distributes over itself. Self-distributivity∈ was pinpointed already∗ in the late 19th century works of logicians Peirce and Schr¨oder [69, 76], and ever since, it keeps appearing in a natural way throughout mathematics, perhaps most notably in low dimensional topology (knot and braid invariants) [12, 15, 63], in the theory of symmetric spaces [57] and in set theory (Laver’s groupoids of elementary embeddings) [15]. Recently, Moskovich expressed an interesting statement on his blog [60] that while associativity caters to the classical world of space and time, distributivity is, perhaps, the setting for the emerging world of information. -

Higher Braid Groups and Regular Semigroups from Polyadic-Binary Correspondence
mathematics Article Higher Braid Groups and Regular Semigroups from Polyadic-Binary Correspondence Steven Duplij Center for Information Technology (WWU IT), Universität Münster, Röntgenstrasse 7-13, D-48149 Münster, Germany; [email protected] Abstract: In this note, we first consider a ternary matrix group related to the von Neumann regular semigroups and to the Artin braid group (in an algebraic way). The product of a special kind of ternary matrices (idempotent and of finite order) reproduces the regular semigroups and braid groups with their binary multiplication of components. We then generalize the construction to the higher arity case, which allows us to obtain some higher degree versions (in our sense) of the regular semigroups and braid groups. The latter are connected with the generalized polyadic braid equation and R-matrix introduced by the author, which differ from any version of the well-known tetrahedron equation and higher-dimensional analogs of the Yang-Baxter equation, n-simplex equations. The higher degree (in our sense) Coxeter group and symmetry groups are then defined, and it is shown that these are connected only in the non-higher case. Keywords: regular semigroup; braid group; generator; relation; presentation; Coxeter group; symmetric group; polyadic matrix group; querelement; idempotence; finite order element MSC: 16T25; 17A42; 20B30; 20F36; 20M17; 20N15 Citation: Duplij, S. Higher Braid Groups and Regular Semigroups from Polyadic-Binary 1. Introduction Correspondence. Mathematics 2021, 9, We begin by observing that the defining relations of the von Neumann regular semi- 972. https://doi.org/10.3390/ groups (e.g., References [1–3]) and the Artin braid group [4,5] correspond to such properties math9090972 of ternary matrices (over the same set) as idempotence and the orders of elements (period). -

Propositional Fuzzy Logics: Tableaux and Strong Completeness Agnieszka Kulacka
Imperial College London Department of Computing Propositional Fuzzy Logics: Tableaux and Strong Completeness Agnieszka Kulacka A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy in Computing Research. London 2017 Acknowledgements I would like to thank my supervisor, Professor Ian Hodkinson, for his patient guidance and always responding to my questions promptly and helpfully. I am deeply grateful for his thorough explanations of difficult topics, in-depth discus- sions and for enlightening suggestions on the work at hand. Studying under the supervision of Professor Hodkinson also proved that research in logic is enjoyable. Two other people influenced the quality of this work, and these are my exam- iners, whose constructive comments shaped the thesis to much higher standards both in terms of the content as well as the presentation of it. This project would not have been completed without encouragement and sup- port of my husband, to whom I am deeply indebted for that. Abstract In his famous book Mathematical Fuzzy Logic, Petr H´ajekdefined a new fuzzy logic, which he called BL. It is weaker than the three fundamental fuzzy logics Product,Lukasiewicz and G¨odel,which are in turn weaker than classical logic, but axiomatic systems for each of them can be obtained by adding axioms to BL. Thus, H´ajek placed all these logics in a unifying axiomatic framework. In this dissertation, two problems concerning BL and other fuzzy logics have been considered and solved. One was to construct tableaux for BL and for BL with additional connectives. Tableaux are automatic systems to verify whether a given formula must have given truth values, or to build a model in which it does not have these specific truth values. -

Laws of Thought and Laws of Logic After Kant”1
“Laws of Thought and Laws of Logic after Kant”1 Published in Logic from Kant to Russell, ed. S. Lapointe (Routledge) This is the author’s version. Published version: https://www.routledge.com/Logic-from-Kant-to- Russell-Laying-the-Foundations-for-Analytic-Philosophy/Lapointe/p/book/9781351182249 Lydia Patton Virginia Tech [email protected] Abstract George Boole emerged from the British tradition of the “New Analytic”, known for the view that the laws of logic are laws of thought. Logicians in the New Analytic tradition were influenced by the work of Immanuel Kant, and by the German logicians Wilhelm Traugott Krug and Wilhelm Esser, among others. In his 1854 work An Investigation of the Laws of Thought on Which are Founded the Mathematical Theories of Logic and Probabilities, Boole argues that the laws of thought acquire normative force when constrained to mathematical reasoning. Boole’s motivation is, first, to address issues in the foundations of mathematics, including the relationship between arithmetic and algebra, and the study and application of differential equations (Durand-Richard, van Evra, Panteki). Second, Boole intended to derive the laws of logic from the laws of the operation of the human mind, and to show that these laws were valid of algebra and of logic both, when applied to a restricted domain. Boole’s thorough and flexible work in these areas influenced the development of model theory (see Hodges, forthcoming), and has much in common with contemporary inferentialist approaches to logic (found in, e.g., Peregrin and Resnik). 1 I would like to thank Sandra Lapointe for providing the intellectual framework and leadership for this project, for organizing excellent workshops that were the site for substantive collaboration with others working on this project, and for comments on a draft. -

12 Propositional Logic
CHAPTER 12 ✦ ✦ ✦ ✦ Propositional Logic In this chapter, we introduce propositional logic, an algebra whose original purpose, dating back to Aristotle, was to model reasoning. In more recent times, this algebra, like many algebras, has proved useful as a design tool. For example, Chapter 13 shows how propositional logic can be used in computer circuit design. A third use of logic is as a data model for programming languages and systems, such as the language Prolog. Many systems for reasoning by computer, including theorem provers, program verifiers, and applications in the field of artificial intelligence, have been implemented in logic-based programming languages. These languages generally use “predicate logic,” a more powerful form of logic that extends the capabilities of propositional logic. We shall meet predicate logic in Chapter 14. ✦ ✦ ✦ ✦ 12.1 What This Chapter Is About Section 12.2 gives an intuitive explanation of what propositional logic is, and why it is useful. The next section, 12,3, introduces an algebra for logical expressions with Boolean-valued operands and with logical operators such as AND, OR, and NOT that Boolean algebra operate on Boolean (true/false) values. This algebra is often called Boolean algebra after George Boole, the logician who first framed logic as an algebra. We then learn the following ideas. ✦ Truth tables are a useful way to represent the meaning of an expression in logic (Section 12.4). ✦ We can convert a truth table to a logical expression for the same logical function (Section 12.5). ✦ The Karnaugh map is a useful tabular technique for simplifying logical expres- sions (Section 12.6). -

Monoid Modules and Structured Document Algebra (Extendend Abstract)
Monoid Modules and Structured Document Algebra (Extendend Abstract) Andreas Zelend Institut fur¨ Informatik, Universitat¨ Augsburg, Germany [email protected] 1 Introduction Feature Oriented Software Development (e.g. [3]) has been established in computer science as a general programming paradigm that provides formalisms, meth- ods, languages, and tools for building maintainable, customisable, and exten- sible software product lines (SPLs) [8]. An SPL is a collection of programs that share a common part, e.g., functionality or code fragments. To encode an SPL, one can use variation points (VPs) in the source code. A VP is a location in a pro- gram whose content, called a fragment, can vary among different members of the SPL. In [2] a Structured Document Algebra (SDA) is used to algebraically de- scribe modules that include VPs and their composition. In [4] we showed that we can reason about SDA in a more general way using a so called relational pre- domain monoid module (RMM). In this paper we present the following extensions and results: an investigation of the structure of transformations, e.g., a condi- tion when transformations commute, insights into the pre-order of modules, and new properties of predomain monoid modules. 2 Structured Document Algebra VPs and Fragments. Let V denote a set of VPs at which fragments may be in- serted and F(V) be the set of fragments which may, among other things, contain VPs from V. Elements of F(V) are denoted by f1, f2,... There are two special elements, a default fragment 0 and an error . An error signals an attempt to assign two or more non-default fragments to the same VP within one module. -

A New Lower Bound for Semigroup Orthogonal Range Searching Peyman Afshani Aarhus University, Denmark [email protected]
A New Lower Bound for Semigroup Orthogonal Range Searching Peyman Afshani Aarhus University, Denmark [email protected] Abstract We report the first improvement in the space-time trade-off of lower bounds for the orthogonal range searching problem in the semigroup model, since Chazelle’s result from 1990. This is one of the very fundamental problems in range searching with a long history. Previously, Andrew Yao’s influential result had shown that the problem is already non-trivial in one dimension [14]: using m units of n space, the query time Q(n) must be Ω(α(m, n) + m−n+1 ) where α(·, ·) is the inverse Ackermann’s function, a very slowly growing function. In d dimensions, Bernard Chazelle [9] proved that the d−1 query time must be Q(n) = Ω((logβ n) ) where β = 2m/n. Chazelle’s lower bound is known to be tight for when space consumption is “high” i.e., m = Ω(n logd+ε n). We have two main results. The first is a lower bound that shows Chazelle’s lower bound was not tight for “low space”: we prove that we must have mQ(n) = Ω(n(log n log log n)d−1). Our lower bound does not close the gap to the existing data structures, however, our second result is that our analysis is tight. Thus, we believe the gap is in fact natural since lower bounds are proven for idempotent semigroups while the data structures are built for general semigroups and thus they cannot assume (and use) the properties of an idempotent semigroup. -
Morphological Image Compression Using Skeletons
Morphological Image Compression using Skeletons Nimrod Peleg Update: March 2008 What is Mathematical Morphology ? “... a theory for analysis of spatial structures which was initiated by George Matheron and Jean Serra. It is called Morphology since it aims at the analyzing the shape and the forms of the objects. It is Mathematical in the sense that the analysis is based on set theory, topology, lattice, random functions, etc. “ (Serra and Soille, 1994). Basic Operation: Dilation • Dilation: replacing every pixel with the maximum value of its neighborhood determined by the structure element (SE) X B x b|, x X b B Original SE Dilation Dilation demonstration Original Figure Dilated Image With Circle SE Dilation example Dilation (Israel Map, circle SE): Basic Operation: Erosion • Erosion: A Dual operation - replacing every pixel with the minimum value of its neighborhood determined by the SE C XBXB C Original SE Erosion Erosion demonstration Original Figure Eroded Image With Circle SE Erosion example Erosion (Lena, circle SE): Original B&W Lena Eroded Lena, SE radius = 4 Composed Operations: Opening • Opening: Erosion and than Dilation removes positive peaks narrower than the SE XBXBB () Original SE Opening Opening demonstration Original Figure Opened Image With Circle SE Opening example Opening (Lena, circle SE): Original B&W Lena Opened Lena, SE radius = 4 Composed Operations: Closing • Closing: Dilation and than Erosion removes negative peaks narrower than the SE XBXBB () Original SE Closing Closing demonstration Original Figure Closed Image With Circle SE Closing example • Closing (Lena, circle SE): Original B&W Lena Closed Lena, SE radius = 4 Cleaning “white” noise Opening & Closing Cleaning “black” noise Closing & Opening Conditioned dilation Y ()()XXBY • Example: Original Figure Opened Figure By Circle SE Conditioned Dilated Figure Opening By Reconstruction Rec( mask , kernel ) lim( mask ( kernel )) n n • Open by rec.