Introduction to Mathematical Morphology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Linguistic Interpretation of Mathematical Morphology
Eureka-2013. Fourth International Workshop Proceedings Linguistic Interpretation of Mathematical Morphology Agustina Bouchet1,2, Gustavo Meschino3, Marcel Brun1, Rafael Espin Andrade4, Virginia Ballarin1 1 Universidad Nacional de Mar de Plata, Mar de Plata, Argentina. 2 CONICET, Mar de Plata, Argentina. 3 Universidad Nacional de Mar de Plata, Mar de Plata, Argentina. 4 ISPJAE, Universidad Técnica de La Habana, Cuba. [email protected], [email protected], [email protected], [email protected], [email protected] Abstract strains imposed by t-norms and s-norms, which are by themselves also conjunctions and disjunctions. Mathematical Morphology is a theory based on geometry, By replacing t-norm and s-norm by conjunction and algebra, topology and set theory, with strong application disjunction, respectively, we obtain the dilation and ero- to digital image processing. This theory is characterized sion operators for the Compensatory Fuzzy Mathematical by two basic operators: dilation and erosion. In this work Morphology (CMM), called compensatory dilation and we redefine these operators based on compensatory fuzzy compensatory erosion, respectively. Two different im- logic using a linguistic definition, compatible with previ- plementations of the CMM were presented at this moment ous definitions of Fuzzy Mathematical Morphology. A [12,21]. comparison to previous definitions is presented, assessing In this work new operators based on the definition of robustness against noise. the CMM are presented, but replacing the supreme and infimum by logical operators, which allow for a linguistic Keywords: Fuzzy Logic, Compensatory Fuzzy Logic, interpretation of their meaning. We call the New Com- Mathematical Morphology, Fuzzy Mathematical Mor- pensatory Morphological Operators. -

Lecture 5: Binary Morphology
Lecture 5: Binary Morphology c Bryan S. Morse, Brigham Young University, 1998–2000 Last modified on January 15, 2000 at 3:00 PM Contents 5.1 What is Mathematical Morphology? ................................. 1 5.2 Image Regions as Sets ......................................... 1 5.3 Basic Binary Operations ........................................ 2 5.3.1 Dilation ............................................. 2 5.3.2 Erosion ............................................. 2 5.3.3 Duality of Dilation and Erosion ................................. 3 5.4 Some Examples of Using Dilation and Erosion . .......................... 3 5.5 Proving Properties of Mathematical Morphology .......................... 3 5.6 Hit-and-Miss .............................................. 4 5.7 Opening and Closing .......................................... 4 5.7.1 Opening ............................................. 4 5.7.2 Closing ............................................. 5 5.7.3 Properties of Opening and Closing ............................... 5 5.7.4 Applications of Opening and Closing .............................. 5 Reading SH&B, 11.1–11.3 Castleman, 18.7.1–18.7.4 5.1 What is Mathematical Morphology? “Morphology” can literally be taken to mean “doing things to shapes”. “Mathematical morphology” then, by exten- sion, means using mathematical principals to do things to shapes. 5.2 Image Regions as Sets The basis of mathematical morphology is the description of image regions as sets. For a binary image, we can consider the “on” (1) pixels to all comprise a set of values from the “universe” of pixels in the image. Throughout our discussion of mathematical morphology (or just “morphology”), when we refer to an image A, we mean the set of “on” (1) pixels in that image. The “off” (0) pixels are thus the set compliment of the set of on pixels. By Ac, we mean the compliment of A,or the off (0) pixels. -
Hit-Or-Miss Transform
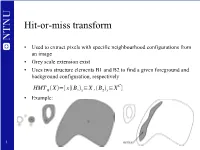
Hit-or-miss transform • Used to extract pixels with specific neighbourhood configurations from an image • Grey scale extension exist • Uses two structure elements B1 and B2 to find a given foreground and background configuration, respectively C HMT B X={x∣B1x⊆X ,B2x⊆X } • Example: 1 Morphological Image Processing Lecture 22 (page 1) 9.4 The hit-or-miss transformation Illustration... Morphological Image Processing Lecture 22 (page 2) Objective is to find a disjoint region (set) in an image • If B denotes the set composed of X and its background, the• match/hit (or set of matches/hits) of B in A,is A B =(A X) [Ac (W X)] ¯∗ ª ∩ ª − Generalized notation: B =(B1,B2) • Set formed from elements of B associated with B1: • an object Set formed from elements of B associated with B2: • the corresponding background [Preceeding discussion: B1 = X and B2 =(W X)] − More general definition: • c A B =(A B1) [A B2] ¯∗ ª ∩ ª A B contains all the origin points at which, simulta- • ¯∗ c neously, B1 found a hit in A and B2 found a hit in A Hit-or-miss transform C HMT B X={x∣B1x⊆X ,B2x⊆X } • Can be written in terms of an intersection of two erosions: HMT X= X∩ X c B B1 B2 2 Hit-or-miss transform • Simple example usages - locate: – Isolated foreground pixels • no neighbouring foreground pixels – Foreground endpoints • one or zero neighbouring foreground pixels – Multiple foreground points • pixels having more than two neighbouring foreground pixels – Foreground contour points • pixels having at least one neighbouring background pixel 3 Hit-or-miss transform example • Locating 4-connected endpoints SEs for 4-connected endpoints Resulting Hit-or-miss transform 4 Hit-or-miss opening • Objective: keep all points that fit the SE. -

Newsletternewsletter Official Newsletter of the International Association for Mathematical Geology
No. 71 December 2005 IAMGIAMG NewsletterNewsletter Official Newsletter of the International Association for Mathematical Geology Contents oronto - welcoming city on the shores of Lake Ontario and site of IAMG 2005 this last August. The organizers of the confer- ence chose well: Hart House of the University of Toronto, an President’s Forum .................................................................................3 Tivy-draped, Oxbridge style college building, recalling the British her- IAMG Journal Report ...........................................................................4 itage, was a very suitable venue for plenary talks in the “Great Hall”, topical sessions in various smaller rooms, spaces for work sessions, Association Business ............................................................................4 posters and the “music room” for reading, computer connections, and The Matrix Man ....................................................................................5 listening to the occasional piano player. Member News .......................................................................................5 Downtown Toronto turned out to be a nicely accessible city with Conference Reports ...............................................................................6 many places within walking distance from the university, and a good public transportation system of Toronto Photo Album ............................................................................7 subways and bus lines to reach Student Affairs ....................................................................................10 -

M-Idempotent and Self-Dual Morphological Filters ا
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 4, APRIL 2012 805 Short Papers___________________________________________________________________________________________________ M-Idempotent and Self-Dual and morphological filters (opening and closing, alternating filters, Morphological Filters alternating sequential filters (ASF)). The quest for self-dual and/or idempotent operators has been the focus of many investigators. We refer to some important work Nidhal Bouaynaya, Member, IEEE, in the area in chronological order. A morphological operator that is Mohammed Charif-Chefchaouni, and idempotent and self-dual has been proposed in [28] by using the Dan Schonfeld, Fellow, IEEE notion of the middle element. The middle element, however, can only be obtained through repeated (possibly infinite) iterations. Meyer and Serra [19] established conditions for the idempotence of Abstract—In this paper, we present a comprehensive analysis of self-dual and the class of the contrast mappings. Heijmans [8] proposed a m-idempotent operators. We refer to an operator as m-idempotent if it converges general method for the construction of morphological operators after m iterations. We focus on an important special case of the general theory of that are self-dual, but not necessarily idempotent. Heijmans and lattice morphology: spatially variant morphology, which captures the geometrical Ronse [10] derived conditions for the idempotence of the self-dual interpretation of spatially variant structuring elements. We demonstrate that every annular operator, in which case it will be called an annular filter. increasing self-dual morphological operator can be viewed as a morphological An alternative framework for morphological image processing that center. Necessary and sufficient conditions for the idempotence of morphological operators are characterized in terms of their kernel representation. -

CALL for PAPERS IEEE Journal of Selected Topics In
CALL FOR PAPERS IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing Special Issue on “Mathematical Morphology in Remote Sensing and Geoscience” Historically, mathematical morphology was the first consistent non-linear image analysis theory, which from the very start included not only theoretical results but also many practical aspects. Mathematical morphology is capable of handling the most varied image types, in a way that is often subtle yet efficient. It can also be used to process general graphs, surfaces, implicit and explicit volumes, manifolds, time or spectral series, in both deterministic and stochastic contexts. In the last five years, connected signal representations and connected operators have emerged as tools for segmentation and filtering, leading to extremely versatile techniques for solving problems in a variety of domains including information science, geoscience, and image and signal analysis and processing. The application of mathematical morphology in processing and analysis of remotely sensed spatial data acquired at multi-spatial-spectral-temporal scales and by-products such as Digital Elevation Model (DEM) and thematic information in map forms has shown significant success in the last two decades. From data acquisition to the level of making theme-specific predictions, there exists several phases that include feature extraction (information retrieval), information analysis/characterization, information reasoning, spatio-temporal modelling and visualization. Relatively, numerous approaches/frameworks/schemes/ algorithms are available to address information retrieval when compare to those approaches available to address the rest of the topics. With the availability of data across various spatial/spectral/temporal resolutions, besides information extraction, other topics like pattern retrieval, pattern analysis, spatial reasoning, and simulation and modeling of spatiotemporal behaviors of several terrestrial phenomena and processes also need to be given emphasis. -

Learning Deep Morphological Networks with Neural Architecture Search APREPRINT
LEARNING DEEP MORPHOLOGICAL NETWORKS WITH NEURAL ARCHITECTURE SEARCH APREPRINT Yufei Hu Nacim Belkhir U2IS, ENSTA Paris, Institut Polytechnique de Paris Safrantech, Safran Group [email protected] [email protected] Jesus Angulo Angela Yao CMM, Mines ParisTech, PSL Research University School of Computing National University of Singapore [email protected] [email protected] Gianni Franchi U2IS, ENSTA Paris, Institut Polytechnique de Paris [email protected] June 16, 2021 ABSTRACT Deep Neural Networks (DNNs) are generated by sequentially performing linear and non-linear processes. Using a combination of linear and non-linear procedures is critical for generating a sufficiently deep feature space. The majority of non-linear operators are derivations of activation functions or pooling functions. Mathematical morphology is a branch of mathematics that provides non-linear operators for a variety of image processing problems. We investigate the utility of integrating these operations in an end-to-end deep learning framework in this paper. DNNs are designed to acquire a realistic representation for a particular job. Morphological operators give topological descriptors that convey salient information about the shapes of objects depicted in images. We propose a method based on meta-learning to incorporate morphological operators into DNNs. The learned architecture demonstrates how our novel morphological operations significantly increase DNN performance on various tasks, including picture classification and edge detection. Keywords Mathematical Morphology; deep learning; architecture search. arXiv:2106.07714v1 [cs.CV] 14 Jun 2021 1 Introduction Over the last decade, deep learning has made several breakthroughs and demonstrated successful applications in various fields (e.g. -

Puupintojen Laadunvalvonta Ja Luokittelu
Image thresholding During the thresholding process, individual pixels in an image are marked as “object” pixels if their value is greater than some threshold value (assuming an object to be brighter than the background) and as “background” pixels otherwise. This convention is known as threshold above. Variants include threshold below, which is opposite of threshold above; threshold inside, where a pixel is labeled "object" if its value is between two thresholds; and threshold outside, which is the opposite of threshold inside (Shapiro, et al. 2001:83). Typically, an object pixel is given a value of “1” while a background pixel is given a value of “0.” Finally, a binary image is created by coloring each pixel white or black, depending on a pixel's label. Image thresholding Sezgin and Sankur (2004) categorize thresholding methods into the following six groups based on the information the algorithm manipulates (Sezgin et al., 2004): • histogram shape-based methods, where, for example, the peaks, valleys and curvatures of the smoothed histogram are analyzed • clustering-based methods, where the gray-level samples are clustered in two parts as background and foreground (object), or alternately are modeled as a mixture of two Gaussians • entropy-based methods result in algorithms that use the entropy of the foreground and background regions, the cross-entropy between the original and binarized image, etc. • object attribute-based methods search a measure of similarity between the gray-level and the binarized images, such as fuzzy shape similarity, edge coincidence, etc. • spatial methods [that] use higher-order probability distribution and/or correlation between pixels • local methods adapt the threshold value on each pixel to the local image characteristics." Mathematical morphology • Mathematical Morphology was born in 1964 from the collaborative work of Georges Matheron and Jean Serra, at the École des Mines de Paris, France. -
Morphological Image Compression Using Skeletons
Morphological Image Compression using Skeletons Nimrod Peleg Update: March 2008 What is Mathematical Morphology ? “... a theory for analysis of spatial structures which was initiated by George Matheron and Jean Serra. It is called Morphology since it aims at the analyzing the shape and the forms of the objects. It is Mathematical in the sense that the analysis is based on set theory, topology, lattice, random functions, etc. “ (Serra and Soille, 1994). Basic Operation: Dilation • Dilation: replacing every pixel with the maximum value of its neighborhood determined by the structure element (SE) X B x b|, x X b B Original SE Dilation Dilation demonstration Original Figure Dilated Image With Circle SE Dilation example Dilation (Israel Map, circle SE): Basic Operation: Erosion • Erosion: A Dual operation - replacing every pixel with the minimum value of its neighborhood determined by the SE C XBXB C Original SE Erosion Erosion demonstration Original Figure Eroded Image With Circle SE Erosion example Erosion (Lena, circle SE): Original B&W Lena Eroded Lena, SE radius = 4 Composed Operations: Opening • Opening: Erosion and than Dilation removes positive peaks narrower than the SE XBXBB () Original SE Opening Opening demonstration Original Figure Opened Image With Circle SE Opening example Opening (Lena, circle SE): Original B&W Lena Opened Lena, SE radius = 4 Composed Operations: Closing • Closing: Dilation and than Erosion removes negative peaks narrower than the SE XBXBB () Original SE Closing Closing demonstration Original Figure Closed Image With Circle SE Closing example • Closing (Lena, circle SE): Original B&W Lena Closed Lena, SE radius = 4 Cleaning “white” noise Opening & Closing Cleaning “black” noise Closing & Opening Conditioned dilation Y ()()XXBY • Example: Original Figure Opened Figure By Circle SE Conditioned Dilated Figure Opening By Reconstruction Rec( mask , kernel ) lim( mask ( kernel )) n n • Open by rec. -

Imagemap Simplification Using Mathematical Morphology
Jalal Amini Imagemap simplification using mathematical morphology M.R.Saradjian ** J. Amini , * Department of Surveying Engineering, Faculty of Engineering *,** Tehran University, Tehran, IRAN. * Department of Research, National Cartographic Center (N.C.C) Tehran, IRAN. [email protected] KEY WORDS: Morphology, Photogrammetry, Remote sensing, Segmentation, Simplification, Thinning. ABSTRACT For a variety of mapping applications, images are the most important primary data sources. In photogrammetry and remote sensing, particular procedures are used for image and map data integration in order to perform change detection and automatic object extraction. The recognition of an object in an image is a complex task that involves a broad range of techniques. In general, three steps are used in this study. The first step is segmentation to object regions of interest. In this step, regions which may contain unknown objects, have to be detected. The second step focuses on the extraction of suitable features and then extraction of objects. The main purpose of feature extraction is to reduce data by means of measuring certain features that distinguish the input patterns. The final step is classification. It assigns a label to an object based on the information provided by its descriptors. At the end of segmentation stage, the images are too still complex. So it is necessary to simplify image for further processes. In this paper, investigation is made on the mathematical morphology operators for simplification of a gray-scale image or imagemap. Then an structure element, ()L 4 , is applied on binary images to extract the skeletonized image. In this stage, there will remain lots of skeletal legs in the resultant image. -

Topics in Mathematical Morphology for Multivariate Images Santiago Velasco-Forero
Topics in mathematical morphology for multivariate images Santiago Velasco-Forero To cite this version: Santiago Velasco-Forero. Topics in mathematical morphology for multivariate images. General Mathematics [math.GM]. Ecole Nationale Supérieure des Mines de Paris, 2012. English. NNT : 2012ENMP0086. pastel-00820581 HAL Id: pastel-00820581 https://pastel.archives-ouvertes.fr/pastel-00820581 Submitted on 6 May 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. !"#$!$%$&'(#&#)!(")(#&($&$()*"+,+-!(# École doctorale nO432 : Sciences des Métiers de l’Ingénieur Doctorat ParisTech THÈSE pour obtenir le grade de docteur délivré par l’École nationale supérieure des mines de Paris Spécialité « Morphologie Mathématique » présentée et soutenue publiquement par Santiago Velasco-Forero le 14 juin 2012 Contributions en morphologie mathématique pour l’analyse d’images multivariées Directeur de thèse : Jesús ANGULO ! Jury M. Dominique JEULIN, Professeur, CMM-MS, Mines ParisTech Président " M. Jos B.T.M. ROERDINK, Professeur, University of Groningen Rapporteur M. Pierre SOILLE, Directeur de recherche, Joint Research Centre of the European Commission Rapporteur # M. Jón Atli BENEDIKTSSON, Professeur, University of Iceland Examinateur M. Fernand MEYER, Directeur de recherche, CMM, Mines ParisTech Examinateur $ M. Jean SERRA, Professeur émérite, ESIEE, Université Paris-Est Examinateur M. -
Computer Vision – A
CS4495 Computer Vision – A. Bobick Morphology CS 4495 Computer Vision Binary images and Morphology Aaron Bobick School of Interactive Computing CS4495 Computer Vision – A. Bobick Morphology Administrivia • PS7 – read about it on Piazza • PS5 – grades are out. • Final – Dec 9 • Study guide will be out by Thursday hopefully sooner. CS4495 Computer Vision – A. Bobick Morphology Binary Image Analysis Operations that produce or process binary images, typically 0’s and 1’s • 0 represents background • 1 represents foreground 00010010001000 00011110001000 00010010001000 Slides: Linda Shapiro CS4495 Computer Vision – A. Bobick Morphology Binary Image Analysis Used in a number of practical applications • Part inspection • Manufacturing • Document processing CS4495 Computer Vision – A. Bobick Morphology What kinds of operations? • Separate objects from background and from one another • Aggregate pixels for each object • Compute features for each object CS4495 Computer Vision – A. Bobick Morphology Example: Red blood cell image • Many blood cells are separate objects • Many touch – bad! • Salt and pepper noise from thresholding • How useable is this data? CS4495 Computer Vision – A. Bobick Morphology Results of analysis • 63 separate objects detected • Single cells have area about 50 • Noise spots • Gobs of cells CS4495 Computer Vision – A. Bobick Morphology Useful Operations • Thresholding a gray-scale image • Determining good thresholds • Connected components analysis • Binary mathematical morphology • All sorts of feature extractors, statistics (area, centroid, circularity, …) CS4495 Computer Vision – A. Bobick Morphology Thresholding • Background is black • Healthy cherry is bright • Bruise is medium dark • Histogram shows two cherry regions (black background has been removed) Pixel counts Pixel 0 Grayscale values 255 CS4495 Computer Vision – A. Bobick Morphology Histogram-Directed Thresholding • How can we use a histogram to separate an image into 2 (or several) different regions? Is there a single clear threshold? 2? 3? CS4495 Computer Vision – A.