Mercator's Projection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Remote Pilot – Small Unmanned Aircraft Systems Study Guide
F FAA-G-8082-22 U.S. Department of Transportation Federal Aviation Administration Remote Pilot – Small Unmanned Aircraft Systems Study Guide August 2016 Flight Standards Service Washington, DC 20591 This page intentionally left blank. Preface The Federal Aviation Administration (FAA) has published the Remote Pilot – Small Unmanned Aircraft Systems (sUAS) Study Guide to communicate the knowledge areas you need to study to prepare to take the Remote Pilot Certificate with an sUAS rating airman knowledge test. This Remote Pilot – Small Unmanned Aircraft Systems Study Guide is available for download from faa.gov. Please send comments regarding this document to [email protected]. Remote Pilot – Small Unmanned Aircraft Systems Study Guide i This page intentionally left blank. Remote Pilot – Small Unmanned Aircraft Systems Study Guide ii Table of Contents Introduction ........................................................................................................................... 1 Obtaining Assistance from the Federal Aviation Administration (FAA) .............................................. 1 FAA Reference Material ...................................................................................................................... 1 Chapter 1: Applicable Regulations .......................................................................................... 3 Chapter 2: Airspace Classification, Operating Requirements, and Flight Restrictions .............. 5 Introduction ........................................................................................................................................ -

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Nicolas-Auguste Tissot: a Link Between Cartography and Quasiconformal Theory
NICOLAS-AUGUSTE TISSOT: A LINK BETWEEN CARTOGRAPHY AND QUASICONFORMAL THEORY ATHANASE PAPADOPOULOS Abstract. Nicolas-Auguste Tissot (1824{1897) published a series of papers on cartography in which he introduced a tool which became known later on, among geographers, under the name of the Tissot indicatrix. This tool was broadly used during the twentieth century in the theory and in the practical aspects of the drawing of geographical maps. The Tissot indicatrix is a graph- ical representation of a field of ellipses on a map that describes its distortion. Tissot studied extensively, from a mathematical viewpoint, the distortion of mappings from the sphere onto the Euclidean plane that are used in drawing geographical maps, and more generally he developed a theory for the distor- sion of mappings between general surfaces. His ideas are at the heart of the work on quasiconformal mappings that was developed several decades after him by Gr¨otzsch, Lavrentieff, Ahlfors and Teichm¨uller.Gr¨otzsch mentions the work of Tissot and he uses the terminology related to his name (in particular, Gr¨otzsch uses the Tissot indicatrix). Teichm¨ullermentions the name of Tissot in a historical section in one of his fundamental papers where he claims that quasiconformal mappings were used by geographers, but without giving any hint about the nature of Tissot's work. The name of Tissot is also missing from all the historical surveys on quasiconformal mappings. In the present paper, we report on this work of Tissot. We shall also mention some related works on cartography, on the differential geometry of surfaces, and on the theory of quasiconformal mappings. -

Forces Different Types of Forces
Forces and motion are a part of your everyday life for example pushing a trolley, a horse pulling a rope, speed and acceleration. Force and motion causes objects to move but also to stay still. Motion is simply a movement but needs a force to move. There are 2 types of forces, contact forces and act at a distance force. Forces Every day you are using forces. Force is basically push and pull. When you push and pull you are applying a force to an object. If you are Appling force to an object you are changing the objects motion. For an example when a ball is coming your way and then you push it away. The motion of the ball is changed because you applied a force. Different Types of Forces There are more forces than push or pull. Scientists group all these forces into two groups. The first group is contact forces, contact forces are forces when 2 objects are physically interacting with each other by touching. The second group is act at a distance force, act at a distance force is when 2 objects that are interacting with each other but not physically touching. Contact Forces There are different types of contact forces like normal Force, spring force, applied force and tension force. Normal force is when nothing is happening like a book lying on a table because gravity is pulling it down. Another contact force is spring force, spring force is created by a compressed or stretched spring that could push or pull. Applied force is when someone is applying a force to an object, for example a horse pulling a rope or a boy throwing a snow ball. -

Geographic Board Games
GSR_3 Geospatial Science Research 3. School of Mathematical and Geospatial Science, RMIT University December 2014 Geographic Board Games Brian Quinn and William Cartwright School of Mathematical and Geospatial Sciences RMIT University, Australia Email: [email protected] Abstract Geographic Board Games feature maps. As board games developed during the Early Modern Period, 1450 to 1750/1850, the maps that were utilised reflected the contemporary knowledge of the Earth and the cartography and surveying technologies at their time of manufacture and sale. As ephemera of family life, many board games have not survived, but those that do reveal an entertaining way of learning about the geography, exploration and politics of the world. This paper provides an introduction to four Early Modern Period geographical board games and analyses how changes through time reflect the ebb and flow of national and imperial ambitions. The portrayal of Australia in three of the games is examined. Keywords: maps, board games, Early Modern Period, Australia Introduction In this selection of geographic board games, maps are paramount. The games themselves tend to feature a throw of the dice and moves on a set path. Obstacles and hazards often affect how quickly a player gets to the finish and in a competitive situation whether one wins, or not. The board games examined in this paper were made and played in the Early Modern Period which according to Stearns (2012) dates from 1450 to 1750/18501. In this period printing gradually improved and books and journals became more available, at least to the well-off. Science developed using experimental techniques and real world observation; relying less on classical authority. -

Monas Hieroglyphica</Em>
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 7-17-2020 Roots of Coded Metaphor in John Dee's Monas Hieroglyphica Joshua Michael Zintel University of South Florida Follow this and additional works at: https://scholarcommons.usf.edu/etd Part of the Philosophy of Science Commons Scholar Commons Citation Zintel, Joshua Michael, "Roots of Coded Metaphor in John Dee's Monas Hieroglyphica" (2020). Graduate Theses and Dissertations. https://scholarcommons.usf.edu/etd/8502 This Thesis is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. Roots of Coded Metaphor in John Dee’s Monas Hieroglyphica by Joshua Michael Zintel A thesis submitted in partial fulfillment of the requirements of the degree of Master of Arts in Liberal Arts with a concentration in Humanities Department of Humanities and Cultural Studies College of Arts and Sciences University of South Florida Major Professor: Brendan Cook, Ph.D. Daniel Belgrad, Ph.D. Benjamin Goldberg, Ph.D. Date of Approval: July 15, 2020 Keywords: renaissance, early modernity, hieroglyphics, ideogram, arbor raritatis, monad Copyright © 2020, Joshua Michael Zintel Dedication This thesis is dedicated to my mother, father, and son, and to my students past and future. Acknowledgments Special thanks to Ray, Karen, and Larimer House for the many years of encouragement, “leaping laughter”, fraternity, sorority, and endless support and insights, without which this thesis would have never been written; also thanks to my advisor and friend, Dr. -
Mercator-15Dec2015.Pdf
THE MERCATOR PROJECTIONS THE NORMAL AND TRANSVERSE MERCATOR PROJECTIONS ON THE SPHERE AND THE ELLIPSOID WITH FULL DERIVATIONS OF ALL FORMULAE PETER OSBORNE EDINBURGH 2013 This article describes the mathematics of the normal and transverse Mercator projections on the sphere and the ellipsoid with full deriva- tions of all formulae. The Transverse Mercator projection is the basis of many maps cov- ering individual countries, such as Australia and Great Britain, as well as the set of UTM projections covering the whole world (other than the polar regions). Such maps are invariably covered by a set of grid lines. It is important to appreciate the following two facts about the Transverse Mercator projection and the grids covering it: 1. Only one grid line runs true north–south. Thus in Britain only the grid line coincident with the central meridian at 2◦W is true: all other meridians deviate from grid lines. The UTM series is a set of 60 distinct Transverse Mercator projections each covering a width of 6◦in latitude: the grid lines run true north–south only on the central meridians at 3◦E, 9◦E, 15◦E, ... 2. The scale on the maps derived from Transverse Mercator pro- jections is not uniform: it is a function of position. For ex- ample the Landranger maps of the Ordnance Survey of Great Britain have a nominal scale of 1:50000: this value is only ex- act on two slightly curved lines almost parallel to the central meridian at 2◦W and distant approximately 180km east and west of it. The scale on the central meridian is constant but it is slightly less than the nominal value. -
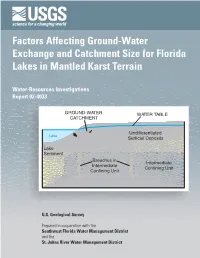
Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain
Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain Water-Resources Investigations Report 02-4033 GROUND-WATER WATER TABLE CATCHMENT Undifferentiated Lake Surficial Deposits Lake Sediment Breaches in Intermediate Intermediate Confining Unit Confining Unit U.S. Geological Survey Prepared in cooperation with the Southwest Florida Water Management District and the St. Johns River Water Management District Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain By T.M. Lee U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 02-4033 Prepared in cooperation with the SOUTHWEST FLORIDA WATER MANAGEMENT DISTRICT and the ST. JOHNS RIVER WATER MANAGEMENT DISTRICT Tallahassee, Florida 2002 U.S. DEPARTMENT OF THE INTERIOR GALE A. NORTON, Secretary U.S. GEOLOGICAL SURVEY CHARLES G. GROAT, Director The use of firm, trade, and brand names in this report is for identification purposes only and does not constitute endorsement by the U.S. Geological Survey. For additional information Copies of this report can be write to: purchased from: District Chief U.S. Geological Survey U.S. Geological Survey Branch of Information Services Suite 3015 Box 25286 227 N. Bronough Street Denver, CO 80225-0286 Tallahassee, FL 32301 888-ASK-USGS Additional information about water resources in Florida is available on the World Wide Web at http://fl.water.usgs.gov CONTENTS Abstract................................................................................................................................................................................. -

Pedro Nunes and the Retrogression of the Sun
Pedro Nunes and the Retrogression of the Sun Peter Lynch School of Mathematics & Statistics University College Dublin Irish Mathematical Society, Annual Meeting IT Sligo, 31 August 2017 Outline Introduction Pedro Nunes Analysis of Solar Retrogression Variation of the Azimuthal Angle Sources Intro Nunes Regression Variation Refs Outline Introduction Pedro Nunes Analysis of Solar Retrogression Variation of the Azimuthal Angle Sources Intro Nunes Regression Variation Refs Background How I learned about this question. I Recreational Maths Conference in Lisbon. I Henriques Leitão gave a talk on Pedro Nunes. I Claim: The Sun sometimes reverses direction. I My reaction was one of scepticism. I Initially, I could not prove the result. I Later I managed to prove retrogression occurs. I I hope that I can convince you of this, too. Intro Nunes Regression Variation Refs Things We All Know Well I The Sun rises in the Eastern sky. I It follows a smooth and even course. I It sets in the Western sky. The idea that the compass bearing of the Sun might reverse seems fanciful. But that was precisely what Portuguese mathematician Pedro Nunes showed in 1537. Intro Nunes Regression Variation Refs Obelisk serving as a Gnomon Path of Sun traces a hyperbola Intro Nunes Regression Variation Refs Nunes made an amazing prediction: In certain circumstances, the shadow cast by the gnomon of a sun dial moves backwards. Nunes’ prediction was counter-intuitive: We expect the azimuthal angle to increase steadily. If the shadow on the sun dial moves backwards, the Sun must reverse direction or retrogress. Nunes’ discovery came long before Newton or Galileo or Kepler, and Copernicus had not yet published his heliocentric theory. -

Ts 144 031 V12.3.0 (2015-07)
ETSI TS 1144 031 V12.3.0 (201515-07) TECHNICAL SPECIFICATION Digital cellular telecocommunications system (Phahase 2+); Locatcation Services (LCS); Mobile Station (MS) - SeServing Mobile Location Centntre (SMLC) Radio Resosource LCS Protocol (RRLP) (3GPP TS 44.0.031 version 12.3.0 Release 12) R GLOBAL SYSTTEM FOR MOBILE COMMUNUNICATIONS 3GPP TS 44.031 version 12.3.0 Release 12 1 ETSI TS 144 031 V12.3.0 (2015-07) Reference RTS/TSGG-0244031vc30 Keywords GSM ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice The present document can be downloaded from: http://www.etsi.org/standards-search The present document may be made available in electronic versions and/or in print. The content of any electronic and/or print versions of the present document shall not be modified without the prior written authorization of ETSI. In case of any existing or perceived difference in contents between such versions and/or in print, the only prevailing document is the print of the Portable Document Format (PDF) version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: https://portal.etsi.org/People/CommiteeSupportStaff.aspx Copyright Notification No part may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm except as authorized by written permission of ETSI. -

And Are Lines on Sphere B That Contain Point Q
11-5 Spherical Geometry Name each of the following on sphere B. 3. a triangle SOLUTION: are examples of triangles on sphere B. 1. two lines containing point Q SOLUTION: and are lines on sphere B that contain point Q. ANSWER: 4. two segments on the same great circle SOLUTION: are segments on the same great circle. ANSWER: and 2. a segment containing point L SOLUTION: is a segment on sphere B that contains point L. ANSWER: SPORTS Determine whether figure X on each of the spheres shown is a line in spherical geometry. 5. Refer to the image on Page 829. SOLUTION: Notice that figure X does not go through the pole of ANSWER: the sphere. Therefore, figure X is not a great circle and so not a line in spherical geometry. ANSWER: no eSolutions Manual - Powered by Cognero Page 1 11-5 Spherical Geometry 6. Refer to the image on Page 829. 8. Perpendicular lines intersect at one point. SOLUTION: SOLUTION: Notice that the figure X passes through the center of Perpendicular great circles intersect at two points. the ball and is a great circle, so it is a line in spherical geometry. ANSWER: yes ANSWER: PERSEVERANC Determine whether the Perpendicular great circles intersect at two points. following postulate or property of plane Euclidean geometry has a corresponding Name two lines containing point M, a segment statement in spherical geometry. If so, write the containing point S, and a triangle in each of the corresponding statement. If not, explain your following spheres. reasoning. 7. The points on any line or line segment can be put into one-to-one correspondence with real numbers. -

The Longitude of the Mediterranean Throughout History: Facts, Myths and Surprises Luis Robles Macías
The longitude of the Mediterranean throughout history: facts, myths and surprises Luis Robles Macías To cite this version: Luis Robles Macías. The longitude of the Mediterranean throughout history: facts, myths and sur- prises. E-Perimetron, National Centre for Maps and Cartographic Heritage, 2014, 9 (1), pp.1-29. hal-01528114 HAL Id: hal-01528114 https://hal.archives-ouvertes.fr/hal-01528114 Submitted on 27 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. e-Perimetron, Vol. 9, No. 1, 2014 [1-29] www.e-perimetron.org | ISSN 1790-3769 Luis A. Robles Macías* The longitude of the Mediterranean throughout history: facts, myths and surprises Keywords: History of longitude; cartographic errors; comparative studies of maps; tables of geographical coordinates; old maps of the Mediterranean Summary: Our survey of pre-1750 cartographic works reveals a rich and complex evolution of the longitude of the Mediterranean (LongMed). While confirming several previously docu- mented trends − e.g. the adoption of erroneous Ptolemaic longitudes by 15th and 16th-century European cartographers, or the striking accuracy of Arabic-language tables of coordinates−, we have observed accurate LongMed values largely unnoticed by historians in 16th-century maps and noted that widely diverging LongMed values coexisted up to 1750, sometimes even within the works of one same author.