Predictive Sets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Furstenberg and Margulis Awarded 2020 Abel Prize
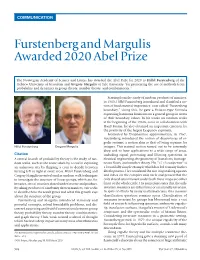
COMMUNICATION Furstenberg and Margulis Awarded 2020 Abel Prize The Norwegian Academy of Science and Letters has awarded the Abel Prize for 2020 to Hillel Furstenberg of the Hebrew University of Jerusalem and Gregory Margulis of Yale University “for pioneering the use of methods from probability and dynamics in group theory, number theory, and combinatorics.” Starting from the study of random products of matrices, in 1963, Hillel Furstenberg introduced and classified a no- tion of fundamental importance, now called “Furstenberg boundary.” Using this, he gave a Poisson-type formula expressing harmonic functions on a general group in terms of their boundary values. In his works on random walks at the beginning of the 1960s, some in collaboration with Harry Kesten, he also obtained an important criterion for the positivity of the largest Lyapunov exponent. Motivated by Diophantine approximation, in 1967, Furstenberg introduced the notion of disjointness of er- godic systems, a notion akin to that of being coprime for Hillel Furstenberg Gregory Margulis integers. This natural notion turned out to be extremely deep and to have applications to a wide range of areas, Citation including signal processing and filtering questions in A central branch of probability theory is the study of ran- electrical engineering, the geometry of fractal sets, homoge- dom walks, such as the route taken by a tourist exploring neous flows, and number theory. His “×2 ×3 conjecture” is an unknown city by flipping a coin to decide between a beautifully simple example which has led to many further turning left or right at every cross. Hillel Furstenberg and developments. -

From Odometers to Circular Systems: a Global Structure Theorem
JOURNALOF MODERN DYNAMICS doi: 10.3934/jmd.2019024 VOLUME 15, 2019, 345–423 FROM ODOMETERS TO CIRCULAR SYSTEMS: A GLOBAL STRUCTURE THEOREM MATTHEW FOREMAN AND BENJAMIN WEISS (Communicated by Federico Rodriguez Hertz) ABSTRACT. The main result of this paper is that two large collections of er- godic measure preserving systems, the Odometer Based and the Circular Sys- tems have the same global structure with respect to joinings that preserve underlying timing factors. The classes are canonically isomorphic by a contin- uous map that takes synchronous and anti-synchronous factor maps to syn- chronous and anti-synchronous factor maps, synchronous and anti-synchro- nous measure-isomorphisms to synchronous and anti-synchronous measure- isomorphisms, weakly mixing extensions to weakly mixing extensions and compact extensions to compact extensions. The first class includes all fi- nite entropy ergodic transformations that have an odometer factor. By re- sults in [6], the second class contains all transformations realizable as dif- feomorphisms using the untwisted Anosov–Katok method. An application of the main result will appear in a forthcoming paper [7] that shows that the diffeomorphisms of the torus are inherently unclassifiable up to measure- isomorphism. Other consequences include the existence of measure distal diffeomorphisms of arbitrary countable distal height. CONTENTS 1. Introduction 346 2. Preliminaries 350 2.1. Measure spaces 350 2.2. Joinings 351 2.3. Symbolic systems 353 2.4. Locations 355 2.5. A note on inverses of symbolic shifts 356 2.6. Generic points and sequences 357 2.7. Unitary operators 364 2.8. Stationary codes and d¯-distance 365 3. Odometer based and circular symbolic systems 366 3.1. -
Cbms095-Endmatter.Pdf
Selected Titles in This Series 95 Benjamin Weiss, Single orbit dynamics, 2000 94 David J. Salt man, Lectures on division algebras, 1999 93 Goro Shimura, Euler products and Eisenstein series, 1997 92 Fan R. K. Chung, Spectral graph theory, 1997 91 J. P. May et al., Equivariant homotopy and cohomology theory, dedicated to the memory of Robert J. Piacenza, 1996 90 John Roe, Index theory, coarse geometry, and topology of manifolds, 1996 89 Clifford Henry Taubes, Metrics, connections and gluing theorems, 1996 88 Craig Huneke, Tight closure and its applications, 1996 87 John Erik Fornaess, Dynamics in several complex variables, 1996 86 Sorin Popa, Classification of subfactors and their endomorphisms, 1995 85 Michio Jimbo and Tetsuji Miwa, Algebraic analysis of solvable lattice models, 1994 84 Hugh L. Montgomery, Ten lectures on the interface between analytic number theory and harmonic analysis, 1994 83 Carlos E. Kenig, Harmonic analysis techniques for second order elliptic boundary value problems, 1994 82 Susan Montgomery, Hopf algebras and their actions on rings, 1993 81 Steven G. Krantz, Geometric analysis and function spaces, 1993 80 Vaughan F. R. Jones, Subfactors and knots, 1991 79 Michael Frazier, Bjorn Jawerth, and Guido Weiss, Littlewood-Paley theory and the study of function spaces, 1991 78 Edward Formanek, The polynomial identities and variants ofnxn matrices, 1991 77 Michael Christ, Lectures on singular integral operators, 1990 76 Klaus Schmidt, Algebraic ideas in ergodic theory, 1990 75 F. Thomas Farrell and L. Edwin Jones, Classical aspherical manifolds, 1990 74 Lawrence C. Evans, Weak convergence methods for nonlinear partial differential equations, 1990 73 Walter A. -
Continuum 2006.Indd
ContinuUM Newsletter of the Department of Mathematics at the Uni ver si ty of Mich i gan 2006 Mathematical Modeling View from the in Sleep Gene Research Chair’s Offi ce The interdisciplinary research of As- Tony Bloch sistant Professor Daniel Forger is receiving The Department of Mathematics has wide recognition from the scientifi c com- had a busy and productive year. During munity. Forger, who joined the Department this time, many of our accomplished fac- of Mathematics this year in the Mathemati- ulty and excellent students received various cal Biology program, works in the area of honors, some of which are detailed else- circadian rhythms and the biological clock. where in this issue of ContinuUM. The core of his thesis involved the con- struction of a detailed biochemical model One should be cautious about taking of the mammalian intracellular circadian outside rankings too seriously. That said, clock. His model is now the most detailed we are pleased to report that our Depart- and realistic one available. mental ranking in the US News and World Report rose from 9th in 2002 to 7th in Forger used his model in recent re- 2006, tied with the California Institute of search with collaborators from the Univer- Technology, New York University and Yale sity of Utah’s Huntsman Cancer Institute. University. It is a pleasure to be associated The studies showed that the effect of a mu- with such a distinguished and exciting De- tation in a key gene involved in the regula- partment. tion of sleep and wake cycles in mammals works in the opposite way from what was The current size and quality of the De- previously thought. -

Prelegent Benjamin Weiss (Einstein Institute of Mathematics, Hebrew
Benjamin Weiss (Einstein Institute of Mathematics, Hebrew University of Prelegent Jerusalem) Tytuł Ergodic theory of actions of countable groups Termin 20-28 stycznia 2015 Wymiar 15 godzin godzin 20.01, 27.01, wt. 10-12, s. 0009 [20 and 26 Jan (Tu), 10-12AM, room 0009] 21.01, 28.01, śr. 16-18, s. 1016 [21 and 28 Jan (We), 4-6PM, room 1016] 22.01, czw. 12-14, s. 0094 [22 Jan (Th), 12AM-2PM, room 0094] Rozkład 23.01, pt. 10-12, s. 0106 [23 Jan (Fr), 10-12AM, room 0106] godzin 26.01, pon. 14-16, s. 0106 [26 Jan (Mo), 2-4PM, room 0106] [Schedule] All lectures will take place at the Faculty of Mathematics and Computer Science, Jagiellonian University in Krakow, ulica (street) Lojasiewicza 6 Bio: Benjamin Weiss is an Israeli mathematician working in the areas of dynamical systems, probability theory, ergodic theory, and topological dynamics. Weiss earned his Ph.D. from Princeton University in 1965, under the supervision of William Feller. He is a professor emeritus of mathematics at the Biogram Hebrew University of Jerusalem, where Fields Medalist Elon Lindenstrauss wkładowcy was one of his students. Since 2000 Benjamin Weiss is an Honorary Foreign member of the American Academy of Arts and Sciences. In 2012 he became a fellow of the American Mathematical Society in recognition of his outstanding contributions to the creation, exposition, advancement, communication, and utilization of mathematics. Opis Abstract: After an introduction to the main classes of groups that will be discussed - amenable, residually finite and sofic - we will survey the ergodic theory of their actions as measure preserving transformations. -

Ergodic Theory of Numbers
AMS / MAA THE CARUS MATHEMATICAL MONOGRAPHS VOL 29 ERGODIC THEORY OF NUMBERS KARMA DAJANI COR KRAAIKAMP Ergodic Theory of Numbers © 2002 by The Mathematical Association of America (Incorporated) Library of Congress Catalog Card Number 2002101376 Print ISBN 978-0-88385-034-3 eISBN 978-1-61444-027-7 Printed in the United States of America Current Printing (last digit): 10 9 8 7 6 5 4 3 2 1 10.1090/car/029 The Carus Mathematical Monographs Number Twenty-Nine Ergodic Theory of Numbers Karma Dajani University of Utrecht Cor Kraaikamp Delft University of Technology Published and Distributed by THE MATHEMATICAL ASSOCIATION OF AMERICA THE CARUS MATHEMATICAL MONOGRAPHS Published by THE MATHEMATICAL ASSOCIATION OF AMERICA Committee on Publications Gerald L. Alexanderson, Chair Carus Mathematical Monographs Editorial Board Kenneth A. Ross, Editor Joseph Auslander Harold P. Boas Robert E. Greene Dennis Hejhal Roger Horn Jeffrey Lagarias Barbara Osofsky Clarence Eugene Wayne David Wright The following Monographs have been published: 1. Calculus of Variations, by G. A. Bliss (out of print) 2. Analytic Functions of a Complex Variable, by D. R. Curtiss (out of print) 3. Mathematical Statistics, by H. L. Rietz (out of print) 4. Projective Geometry, by J. W. Young (out of print) 5. A History of Mathematics in America before 1900, by D. E. Smith and Jekuthiel Ginsburg (out of print) 6. Fourier Series and Orthogonal Polynomials, by Dunham Jackson (out of print) 7. Vectors and Matrices, by C. C. MacDuffee (out of print) 8. Rings and Ideals, by N. H. McCoy (out of print) 9. The Theory of Algebraic Numbers, second edition, by Harry Pollard and Harold G. -

Mathematical Sciences Meetings and Conferences Section
OTICES OF THE AMERICAN MATHEMATICAL SOCIETY Boulder Meeting {August 7-10) page 701 JULY/AUGUST 1989, VOLUME 36, NUMBER 6 Providence, Rhode Island, USA ISSN 0002-9920 Calendar of AMS Meetings and Conferences This calendar lists all meetings which have been approved prior to Mathematical Society in the issue corresponding to that of the Notices the date this issue of Notices was sent to the press. The summer which contains the program of the meeting. Abstracts should be sub and annual meetings are joint meetings of the Mathematical Associ mitted on special forms which are available in many departments of ation of America and the American Mathematical Society. The meet mathematics and from the headquarters office of the Society. Ab ing dates which fall rather far in the future are subjeet to change; this stracts of papers to be presented at the meeting must be received is particularly true of meetings to which no numbers have been as at the headquarters of the Society in Providence, Rhode Island, on signed. Programs of the meetings will appear in the issues indicated or before the deadline given below for the meeting. Note that the below. First and supplementary announcements of the meetings will deadline for abstracts for consideration for presentation at special have appeared in earlier issues. sessions is usually three weeks earlier than that specified below. For Abstracts of papers presented at a meeting of the Society are pub additional information, consult the meeting announcements and the lished in the journal Abstracts of papers presented to the American list of organizers of special sessions.