9. Work and Potential Energy A) Overview B) Box Sliding Down a Ramp
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SMU PHYSICS 1303: Introduction to Mechanics
SMU PHYSICS 1303: Introduction to Mechanics Stephen Sekula1 1Southern Methodist University Dallas, TX, USA SPRING, 2019 S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 1 Outline Conservation of Energy S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 2 Conservation of Energy Conservation of Energy NASA, “Hipnos” by Molinos de Viento and available under Creative Commons from Flickr S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 3 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. I We will understand the mathematical description of energy conservation. I We will explore the implications of the conservation of energy. Jacques-Louis David. “Portrait of Monsieur de Lavoisier and his Wife, chemist Marie-Anne Pierrette Paulze”. Available under Creative Commons from Flickr. S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 4 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. I We will understand the mathematical description of energy conservation. I We will explore the implications of the conservation of energy. Jacques-Louis David. “Portrait of Monsieur de Lavoisier and his Wife, chemist Marie-Anne Pierrette Paulze”. Available under Creative Commons from Flickr. S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 4 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. -

Energetics of a Turbulent Ocean
Energetics of a Turbulent Ocean Raffaele Ferrari January 12, 2009 1 Energetics of a Turbulent Ocean One of the earliest theoretical investigations of ocean circulation was by Count Rumford. He proposed that the meridional overturning circulation was driven by temperature gradients. The ocean cools at the poles and is heated in the tropics, so Rumford speculated that large scale convection was responsible for the ocean currents. This idea was the precursor of the thermohaline circulation, which postulates that the evaporation of water and the subsequent increase in salinity also helps drive the circulation. These theories compare the oceans to a heat engine whose energy is derived from solar radiation through some convective process. In the 1800s James Croll noted that the currents in the Atlantic ocean had a tendency to be in the same direction as the prevailing winds. For example the trade winds blow westward across the mid-Atlantic and drive the Gulf Stream. Croll believed that the surface winds were responsible for mechanically driving the ocean currents, in contrast to convection. Although both Croll and Rumford used simple theories of fluid dynamics to develop their ideas, important qualitative features of their work are present in modern theories of ocean circulation. Modern physical oceanography has developed a far more sophisticated picture of the physics of ocean circulation, and modern theories include the effects of phenomena on a wide range of length scales. Scientists are interested in understanding the forces governing the ocean circulation, and one way to do this is to derive energy constraints on the differ- ent processes in the ocean. -
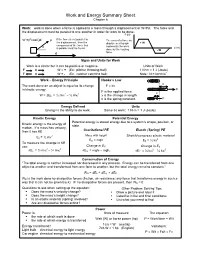
Work and Energy Summary Sheet Chapter 6
Work and Energy Summary Sheet Chapter 6 Work: work is done when a force is applied to a mass through a displacement or W=Fd. The force and the displacement must be parallel to one another in order for work to be done. F (N) W =(Fcosθ)d F If the force is not parallel to The area of a force vs. the displacement, then the displacement graph + W component of the force that represents the work θ d (m) is parallel must be found. done by the varying - W d force. Signs and Units for Work Work is a scalar but it can be positive or negative. Units of Work F d W = + (Ex: pitcher throwing ball) 1 N•m = 1 J (Joule) F d W = - (Ex. catcher catching ball) Note: N = kg m/s2 • Work – Energy Principle Hooke’s Law x The work done on an object is equal to its change F = kx in kinetic energy. F F is the applied force. 2 2 x W = ΔEk = ½ mvf – ½ mvi x is the change in length. k is the spring constant. F Energy Defined Units Energy is the ability to do work. Same as work: 1 N•m = 1 J (Joule) Kinetic Energy Potential Energy Potential energy is stored energy due to a system’s shape, position, or Kinetic energy is the energy of state. motion. If a mass has velocity, Gravitational PE Elastic (Spring) PE then it has KE 2 Mass with height Stretch/compress elastic material Ek = ½ mv 2 EG = mgh EE = ½ kx To measure the change in KE Change in E use: G Change in ES 2 2 2 2 ΔEk = ½ mvf – ½ mvi ΔEG = mghf – mghi ΔEE = ½ kxf – ½ kxi Conservation of Energy “The total energy is neither increased nor decreased in any process. -

Sliding and Rolling: the Physics of a Rolling Ball J Hierrezuelo Secondary School I B Reyes Catdicos (Vdez- Mdaga),Spain and C Carnero University of Malaga, Spain
Sliding and rolling: the physics of a rolling ball J Hierrezuelo Secondary School I B Reyes Catdicos (Vdez- Mdaga),Spain and C Carnero University of Malaga, Spain We present an approach that provides a simple and there is an extra difficulty: most students think that it adequate procedure for introducing the concept of is not possible for a body to roll without slipping rolling friction. In addition, we discuss some unless there is a frictional force involved. In fact, aspects related to rolling motion that are the when we ask students, 'why do rolling bodies come to source of students' misconceptions. Several rest?, in most cases the answer is, 'because the didactic suggestions are given. frictional force acting on the body provides a negative acceleration decreasing the speed of the Rolling motion plays an important role in many body'. In order to gain a good understanding of familiar situations and in a number of technical rolling motion, which is bound to be useful in further applications, so this kind of motion is the subject of advanced courses. these aspects should be properly considerable attention in most introductory darified. mechanics courses in science and engineering. The outline of this article is as follows. Firstly, we However, we often find that students make errors describe the motion of a rigid sphere on a rigid when they try to interpret certain situations related horizontal plane. In this section, we compare two to this motion. situations: (1) rolling and slipping, and (2) rolling It must be recognized that a correct analysis of rolling without slipping. -
Innovation Insights Brief | 2020
FIVE STEPS TO ENERGY STORAGE Innovation Insights Brief | 2020 In collaboration with the California Independent System Operator (CAISO) ABOUT THE WORLD ENERGY COUNCIL ABOUT THIS INSIGHTS BRIEF The World Energy Council is the principal impartial This Innovation Insights brief on energy storage is part network of energy leaders and practitioners promoting of a series of publications by the World Energy Council an affordable, stable and environmentally sensitive focused on Innovation. In a fast-paced era of disruptive energy system for the greatest benefit of all. changes, this brief aims at facilitating strategic sharing of knowledge between the Council’s members and the Formed in 1923, the Council is the premiere global other energy stakeholders and policy shapers. energy body, representing the entire energy spectrum, with over 3,000 member organisations in over 90 countries, drawn from governments, private and state corporations, academia, NGOs and energy stakeholders. We inform global, regional and national energy strategies by hosting high-level events including the World Energy Congress and publishing authoritative studies, and work through our extensive member network to facilitate the world’s energy policy dialogue. Further details at www.worldenergy.org and @WECouncil Published by the World Energy Council 2020 Copyright © 2020 World Energy Council. All rights reserved. All or part of this publication may be used or reproduced as long as the following citation is included on each copy or transmission: ‘Used by permission of the World -

Coupling Effect of Van Der Waals, Centrifugal, and Frictional Forces On
PCCP View Article Online PAPER View Journal | View Issue Coupling effect of van der Waals, centrifugal, and frictional forces on a GHz rotation–translation Cite this: Phys. Chem. Chem. Phys., 2019, 21,359 nano-convertor† Bo Song,a Kun Cai, *ab Jiao Shi, ad Yi Min Xieb and Qinghua Qin c A nano rotation–translation convertor with a deformable rotor is presented, and the dynamic responses of the system are investigated considering the coupling among the van der Waals (vdW), centrifugal and frictional forces. When an input rotational frequency (o) is applied at one end of the rotor, the other end exhibits a translational motion, which is an output of the system and depends on both the geometry of the system and the forces applied on the deformable part (DP) of the rotor. When centrifugal force is Received 25th September 2018, stronger than vdW force, the DP deforms by accompanying the translation of the rotor. It is found that Accepted 26th November 2018 the translational displacement is stable and controllable on the condition that o is in an interval. If o DOI: 10.1039/c8cp06013d exceeds an allowable value, the rotor exhibits unstable eccentric rotation. The system may collapse with the rotor escaping from the stators due to the strong centrifugal force in eccentric rotation. In a practical rsc.li/pccp design, the interval of o can be found for a system with controllable output translation. 1 Introduction components.18–22 Hertal et al.23 investigated the significant deformation of carbon nanotubes (CNTs) by surface vdW forces With the rapid development in nanotechnology, miniaturization that were generated between the nanotube and the substrate. -
Hydroelectric Power -- What Is It? It=S a Form of Energy … a Renewable Resource
INTRODUCTION Hydroelectric Power -- what is it? It=s a form of energy … a renewable resource. Hydropower provides about 96 percent of the renewable energy in the United States. Other renewable resources include geothermal, wave power, tidal power, wind power, and solar power. Hydroelectric powerplants do not use up resources to create electricity nor do they pollute the air, land, or water, as other powerplants may. Hydroelectric power has played an important part in the development of this Nation's electric power industry. Both small and large hydroelectric power developments were instrumental in the early expansion of the electric power industry. Hydroelectric power comes from flowing water … winter and spring runoff from mountain streams and clear lakes. Water, when it is falling by the force of gravity, can be used to turn turbines and generators that produce electricity. Hydroelectric power is important to our Nation. Growing populations and modern technologies require vast amounts of electricity for creating, building, and expanding. In the 1920's, hydroelectric plants supplied as much as 40 percent of the electric energy produced. Although the amount of energy produced by this means has steadily increased, the amount produced by other types of powerplants has increased at a faster rate and hydroelectric power presently supplies about 10 percent of the electrical generating capacity of the United States. Hydropower is an essential contributor in the national power grid because of its ability to respond quickly to rapidly varying loads or system disturbances, which base load plants with steam systems powered by combustion or nuclear processes cannot accommodate. Reclamation=s 58 powerplants throughout the Western United States produce an average of 42 billion kWh (kilowatt-hours) per year, enough to meet the residential needs of more than 14 million people. -
Hydropower Technologies Program — Harnessing America’S Abundant Natural Resources for Clean Power Generation
U.S. Department of Energy — Energy Efficiency and Renewable Energy Wind & Hydropower Technologies Program — Harnessing America’s abundant natural resources for clean power generation. Contents Hydropower Today ......................................... 1 Enhancing Generation and Environmental Performance ......... 6 Large Turbine Field-Testing ............................... 9 Providing Safe Passage for Fish ........................... 9 Improving Mitigation Practices .......................... 11 From the Laboratories to the Hydropower Communities ..... 12 Hydropower Tomorrow .................................... 14 Developing the Next Generation of Hydropower ............ 15 Integrating Wind and Hydropower Technologies ............ 16 Optimizing Project Operations ........................... 17 The Federal Wind and Hydropower Technologies Program ..... 19 Mission and Goals ...................................... 20 2003 Hydropower Research Highlights Alden Research Center completes prototype turbine tests at their facility in Holden, MA . 9 Laboratories form partnerships to develop and test new sensor arrays and computer models . 10 DOE hosts Workshop on Turbulence at Hydroelectric Power Plants in Atlanta . 11 New retrofit aeration system designed to increase the dissolved oxygen content of water discharged from the turbines of the Osage Project in Missouri . 11 Low head/low power resource assessments completed for conventional turbines, unconventional systems, and micro hydropower . 15 Wind and hydropower integration activities in 2003 aim to identify potential sites and partners . 17 Cover photo: To harness undeveloped hydropower resources without using a dam as part of the system that produces electricity, researchers are developing technologies that extract energy from free flowing water sources like this stream in West Virginia. ii HYDROPOWER TODAY Water power — it can cut deep canyons, chisel majestic mountains, quench parched lands, and transport tons — and it can generate enough electricity to light up millions of homes and businesses around the world. -

Kinetic Energy and Work
Kinetic Energy and Work 8.01 W06D1 Today’s Readings: Chapter 13 The Concept of Energy and Conservation of Energy, Sections 13.1-13.8 Announcements Problem Set 4 due Week 6 Tuesday at 9 pm in box outside 26-152 Math Review Week 6 Tuesday at 9 pm in 26-152 Kinetic Energy • Scalar quantity (reference frame dependent) 1 K = mv2 ≥ 0 2 • SI unit is joule: 1J ≡1kg ⋅m2/s2 • Change in kinetic energy: 1 2 1 2 1 2 2 2 1 2 2 2 ΔK = mv f − mv0 = m(vx, f + vy, f + vz, f ) − m(vx,0 + vy,0 + vz,0 ) 2 2 2 2 Momentum and Kinetic Energy: Single Particle Kinetic energy and momentum for a single particle are related by 2 1 2 p K = mv = 2 2m Concept Question: Pushing Carts Consider two carts, of masses m and 2m, at rest on an air track. If you push one cart for 3 seconds and then the other for the same length of time, exerting equal force on each, the kinetic energy of the light cart is 1) larger than 2) equal to 3) smaller than the kinetic energy of the heavy car. Work Done by a Constant Force for One Dimensional Motion Definition: The work W done by a constant force with an x-component, Fx, in displacing an object by Δx is equal to the x- component of the force times the displacement: W = F Δx x Concept Q.: Pushing Against a Wall The work done by the contact force of the wall on the person as the person moves away from the wall is 1. -

SEISMIC ANALYSIS of SLIDING STRUCTURES BROCHARD D.- GANTENBEIN F. CEA Centre D'etudes Nucléaires De Saclay, 91
n 9 COMMISSARIAT A L'ENERGIE ATOMIQUE CENTRE D1ETUDES NUCLEAIRES DE 5ACLAY CEA-CONF —9990 Service de Documentation F9II9I GIF SUR YVETTE CEDEX Rl SEISMIC ANALYSIS OF SLIDING STRUCTURES BROCHARD D.- GANTENBEIN F. CEA Centre d'Etudes Nucléaires de Saclay, 91 - Gif-sur-Yvette (FR). Dept. d'Etudes Mécaniques et Thermiques Communication présentée à : SMIRT 10.' International Conference on Structural Mechanics in Reactor Technology Anaheim, CA (US) 14-18 Aug 1989 SEISHIC ANALYSIS OF SLIDING STRUCTURES D. Brochard, F. Gantenbein C.E.A.-C.E.N. Saclay - DEHT/SMTS/EHSI 91191 Gif sur Yvette Cedex 1. INTRODUCTION To lirait the seism effects, structures may be base isolated. A sliding system located between the structure and the support allows differential motion between them. The aim of this paper is the presentation of the method to calculate the res- ponse of the structure when the structure is represented by its elgenmodes, and the sliding phenomenon by the Coulomb friction model. Finally, an application to a simple structure shows the influence on the response of the main parameters (friction coefficient, stiffness,...). 2. COULOMB FRICTION HODEL Let us consider a stiff mass, layed on an horizontal support and submitted to an external force Fe (parallel to the support). When Fg is smaller than a limit force ? p there is no differential motion between the support and the mass and the friction force balances the external force. The limit force is written: Fj1 = \x Fn where \i is the friction coefficient and Fn the modulus of the normal force applied by the mass to the support (in this case, Fn is equal to the weight of the mass). -

Feeling Joules and Watts
FEELING JOULES AND WATTS OVERVIEW & PURPOSE Power was originally measured in horsepower – literally the number of horses it took to do a particular amount of work. James Watt developed this term in the 18th century to compare the output of steam engines to the power of draft horses. This allowed people who used horses for work on a regular basis to have an intuitive understanding of power. 1 horsepower is about 746 watts. In this lab, you’ll learn about energy, work and power – including your own capacity to do work. Energy is the ability to do work. Without energy, nothing would grow, move, or change. Work is using a force to move something over some distance. work = force x distance Energy and work are measured in joules. One joule equals the work done (or energy used) when a force of one newton moves an object one meter. One newton equals the force required to accelerate one kilogram one meter per second squared. How much energy would it take to lift a can of soda (weighing 4 newtons) up two meters? work = force x distance = 4N x 2m = 8 joules Whether you lift the can of soda quickly or slowly, you are doing 8 joules of work (using 8 joules of energy). It’s often helpful, though, to measure how quickly we are doing work (or using energy). Power is the amount of work (or energy used) in a given amount of time. http://www.rdcep.org/demo-collection page 1 work power = time Power is measured in watts. One watt equals one joule per second. -

Friction Physics Terms
Friction Physics terms • coefficient of friction • static friction • kinetic friction • rolling friction • viscous friction • air resistance Equations kinetic friction static friction rolling friction Models for friction The friction force is approximately equal to the normal force multiplied by a coefficient of friction. What is friction? Friction is a “catch-all” term that collectively refers to all forces which act to reduce motion between objects and the matter they contact. Friction often transforms the energy of motion into thermal energy or the wearing away of moving surfaces. Kinetic friction Kinetic friction is sliding friction. It is a force that resists sliding or skidding motion between two surfaces. If a crate is dragged to the right, friction points left. Friction acts in the opposite direction of the (relative) motion that produced it. Friction and the normal force Which takes more force to push over a rough floor? The board with the bricks, of course! The simplest model of friction states that frictional force is proportional to the normal force between two surfaces. If this weight triples, then the normal force also triples—and the force of friction triples too. A model for kinetic friction The force of kinetic friction Ff between two surfaces equals the coefficient of kinetic friction times the normal force . μk FN direction of motion The coefficient of friction is a constant that depends on both materials. Pairs of materials with more friction have a higher μk. ● Basically the μk tells you how many newtons of friction you get per newton of normal force. A model for kinetic friction The coefficient of friction μk is typically between 0 and 1.