Learning to Draw Vector Graphics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Author Graphics Guide (PDF)
Annual Reviews Graphics Guide 1. Keep figures editable If you are creating your figures from scratch: Annual Reviews has a team of Illustration Editors who work with your figures • Send the original, editable/vector format using Adobe Illustrator to ensure accuracy and consistency, provide graphical wherever possible (for graphs, diagrams, etc.). enhancements, and apply our house style. During this process, we may change Avoid creating line- or text-heavy diagrams in font, type size, colors, layout, figure size, and information hierarchy, and we may raster programs such as Photoshop. redraw certain elements. • Keep text/lines on separate layers from any Therefore, while we prefer that figures be as close to final as possible when you photo, or send one version of the image with send them, please make sure the files are not flattened* or uneditable. labels and one without. Suggested: place the photo in Illustrator or PowerPoint, then add NOTE: many other journals require print-ready, flattened files; our requirement text/lines; send us the original .AI or .PPT file. for editable files is quite different, due to the figure enhancement and editing we provide. • Make sure all photos you start with are high resolution (300 dpi at desired final size). Examples of desired figure attributes: Knob K If you are using previously published figures: Mauer’s Editable, vector clefts lines, shapes, MCs and arrows • The low-resolution figures found in online Parasite journals are usually not adequate for our plasma PPM membrane press-quality publication. Contact the author or PVM Text is live and publisher for high-resolution, editable files. -

14. Using Your Own Images
Cricut Design Space User Manual 14. Using your own images D. Preparing artwork from CorelDRAW Cricut Design Space™ lets you upload most .jpg, .gif, .png, .bmp, .svg, and .dxf images and convert them into cuttable shapes. The tool doesn’t allow you to make modifications to the design itself, which is why working with CorelDRAW to prepare your files is effective. With CorelDRAW, you can use the full range of tools to create and modify your designs, and then upload them to Cricut Design Space. The two different types of images are Basic and Vector. CorelDRAW is primarily a vector program, which means it saves vector files like .svg and .dxf, but it can also save .jpg, .png, and .bmp files. Artwork created in CorelDRAW can be used to: (1) Print the image on your home printer and cut it out using your Cricut® machine with the Print then Cut feature. (2) Cut or draw the outline of the image. Page | 1 Cricut Design Space User Manual (3) Create cuttable shapes and images. Multilayer images will be separated into layers on the Canvas. Tip: Multilayer images can be flattened into a single layer in Cricut Design Space. Use the Flatten tool to turn any multilayer image into a single layer that can be used with Print then Cut. Page | 2 Cricut Design Space User Manual Preparing artwork The following steps use CorelDRAW X8. Although the screenshots will be different in older versions, the process is the same. Vector files .dxf and .svg Step 1 Create or modify an image using any of the CorelDRAW tools. -

Handel Gothic Free Font Download Handel Gothic Light Font
handel gothic free font download Handel Gothic Light Font. Use the text generator tool below to preview Handel Gothic Light font, and create appealing text graphics with different colors and hundreds of text effects. Font Tags. Search. :: You Might Like. About. Font Meme is a fonts & typography resource. The "Fonts in Use" section features posts about fonts used in logos, films, TV shows, video games, books and more; The "Text Generator" section features simple tools that let you create graphics with fonts of different styles as well as various text effects; The "Font Collection" section is the place where you can browse, filter, custom preview and download free fonts. Frequently Asked Questions. Can I use fonts from the Google Fonts catalog on any page? Yes. The open source fonts in the Google Fonts catalog are published under licenses that allow you to use them on any website, whether it’s commercial or personal. Search queries may surface results from external foundries, who may or may not use open source licenses. Should I host fonts on my own website’s server? We recommend copying the code snippets available under the "Embed" tab in the selection drawer directly into your website’s HTML and CSS. Read more about the performance benefits this will have in the “Will web fonts slow down my page?” section below. Can I download the fonts on Google Fonts to my own computer? Yes. To download fonts, simply create a selection of fonts, open the drawer at the bottom of the screen, then click the "Download" icon in the upper-right corner of the selection drawer. -

Introduction to Scalable Vector Graphics
Introduction to Scalable Vector Graphics Presented by developerWorks, your source for great tutorials ibm.com/developerWorks Table of Contents If you're viewing this document online, you can click any of the topics below to link directly to that section. 1. Introduction.............................................................. 2 2. What is SVG?........................................................... 4 3. Basic shapes............................................................ 10 4. Definitions and groups................................................. 16 5. Painting .................................................................. 21 6. Coordinates and transformations.................................... 32 7. Paths ..................................................................... 38 8. Text ....................................................................... 46 9. Animation and interactivity............................................ 51 10. Summary............................................................... 55 Introduction to Scalable Vector Graphics Page 1 of 56 ibm.com/developerWorks Presented by developerWorks, your source for great tutorials Section 1. Introduction Should I take this tutorial? This tutorial assists developers who want to understand the concepts behind Scalable Vector Graphics (SVG) in order to build them, either as static documents, or as dynamically generated content. XML experience is not required, but a familiarity with at least one tagging language (such as HTML) will be useful. For basic XML -
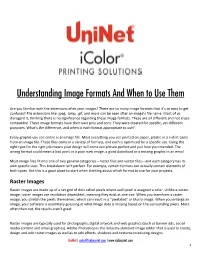
Understanding Image Formats and When to Use Them
Understanding Image Formats And When to Use Them Are you familiar with the extensions after your images? There are so many image formats that it’s so easy to get confused! File extensions like .jpeg, .bmp, .gif, and more can be seen after an image’s file name. Most of us disregard it, thinking there is no significance regarding these image formats. These are all different and not cross‐ compatible. These image formats have their own pros and cons. They were created for specific, yet different purposes. What’s the difference, and when is each format appropriate to use? Every graphic you see online is an image file. Most everything you see printed on paper, plastic or a t‐shirt came from an image file. These files come in a variety of formats, and each is optimized for a specific use. Using the right type for the right job means your design will come out picture perfect and just how you intended. The wrong format could mean a bad print or a poor web image, a giant download or a missing graphic in an email Most image files fit into one of two general categories—raster files and vector files—and each category has its own specific uses. This breakdown isn’t perfect. For example, certain formats can actually contain elements of both types. But this is a good place to start when thinking about which format to use for your projects. Raster Images Raster images are made up of a set grid of dots called pixels where each pixel is assigned a color. -

Minnesota State Archives Preferred File Formats
Minnesota State Archives Preferred File Formats This document outlines file formats preferred by the Minnesota State Archives for digital preservation. This list is not intended to be a comprehensive list of what is accepted, but to provide guidance where multiple formats are possible to transfer to the archives. At the end of this document, you can also find some best practices when preparing files for transfer to the state archives. File Formats by Content Type ● Text ○ PDF/A ○ PDF ○ TXT ○ RTF ○ DOC or DOCX ● Spreadsheets ○ CSV ○ XLS or XLSX ● Raster/Bitmap Images ○ TIFF ○ JPEG ○ PDF/A ○ PNG ○ DNG, RAW, or other ‘negative’ formats ○ JPEG2000 ● Vector Graphics ○ SVG ● Audio ○ BWF ○ WAV ○ Video ○ MP4 ○ MOV ○ AVI ○ Motion JPEG 2000 ● Web pages ○ WARC ○ HTML - for static/as-developed only ● Email ○ MBOX Minnesota State Archives, September 2016 (v.1) ○ MSG ● Presentations/Slideshows ○ PDF if possible ○ PPT or PPTX ● Database ○ CSV if possible, original format if not ● Containers ○ ZIP ● Other files ○ if they can be faithfully represented in PDF/A (secondarily, PDF), include the original format and PDF ○ sets of files, interdependent files, executable files, proprietary formats, other weird/complex files = provide in original format, zipped for download Best Practices for Preparing Files for Transfer Once you have negotiated the transfer of digital materials to the State Archives, the materials will then need to be prepared. The State Archives can offer guidance and assistance throughout this process, but these best practices are a useful place to start: ● Identify and remove as many duplicates as possible, whether they are identical digital copies or where both digital and paper copies exist ○ There are some free software tools available to help identify digital duplicates; talk to the State Archives staff for more information. -

Coreldraw Graphics Suite 2020 Product Guide
Create Connect Complete Welcome to our fastest, With a focus on innovation, CorelDRAW Graphics Suite 2020 powers the professional Say hello to smartest, and most connected graphic design workflow from concept to final graphics suite ever. output. Consider it done: Manage your creative Whether your preferred platform is Windows or workflow more efficiently with tools for serious Mac, CorelDRAW® Graphics Suite 2020 sets a productivity. Collaborate on important design new standard for productivity, power, and projects with clients and key stakeholders to collaboration. Experience design tools that use get more done in less time—and deliver artificial intelligence (AI) to anticipate the exceptional results. results you're looking for and make them a reality. Use CorelDRAW.app™ to collaborate Connect with your creative side: Applications with colleagues and clients in real time. Plus, for vector illustration and layout, photo editing, take advantage of performance boosts across and typography help unleash your creative the applications that further accelerate your genius in digital and print. Transform ideas into creative process. works of art with unique features that simplify complex workflows and inspire jaw-dropping Three years ago, CorelDRAW made history with designs. the introduction of LiveSketch™, the industry's first AI-based vector drawing experience. Now Express yourself with confidence: Control the we've incorporated AI technology across our design experience with powerful graphics tools key applications to expand your design built natively for Windows, macOS, and web. capabilities and accelerate your workflow. JPEG Customizable workspaces and flexible features artifact removal, upsampling results, bitmap- complement the way you work. Design how to-vector tracing, and eye-catching art styles you want, wherever and whenever it's are all made exceptional by machine-learned convenient for you. -

“Det Är På Gott Och Ont” En Enkätundersökning Om Googles Insamling Av Användardata
KANDIDATUPPSATS I BIBLIOTEKS- OCH INFORMATIONSVETENSKAP AKADEMIN FÖR BIBLIOTEK, INFORMATION, PEDAGOGIK OCH IT 2020 “Det är på gott och ont” En enkätundersökning om Googles insamling av användardata OLIVIA BÄCK SOFIA HERNQVIST © Författaren/Författarna Mångfaldigande och spridande av innehållet i denna uppsats – helt eller delvis – är förbjudet utan medgivande. Svensk titel: “Det är på gott och ont”: En enkätundersökning om Googles insamling av användardata Engelsk titel: “It’s for better and for worse”: A survey about Google’s collection of user data Författare: Olivia Bäck & Sofia Hernqvist Färdigställt: 2020 Abstract: This study focuses on Google’s user agreements and how students within the field of library and information science at the University of Borås are perceiving and relating to these agreements. User agreements are designed as contracts which makes the user data available for Google, but also for the user to protect his or her personal integrity. A problem recent studies show is that few internet users read these agreements and don’t know enough about what Google collect and do with their user data. In this study the concept of surveillance capitalism is used to describe how Google has become a dominant actor on a new form of market. This market is partly formed by Google’s business model which turns user data into financial gain for the company. It is discussed in recent studies that this form of exploitation of user data is problematic and is intruding on people’s personal integrity. The theoretical framework was constructed from theories that social norms influence human behaviour which makes people sign the agreements without reading them. -

Vector Graphic Definition Vector Graphic
8/21/2015 Vector Graphic Definition Vector Graphic Unlike JPEGs, GIFs, and BMP images, vector graphics are not made up of a grid of pixels. Instead, vector graphics are comprised of paths, which are defined by a start and end point, along with other points, curves, and angles along the way. A path can be a line, a square, a triangle, or a curvy shape. These paths can be used to create simple drawings or complex diagrams. Paths are even used to define the characters of specific typefaces. Because vector-based images are not made up of a specific number of dots, they can be scaled to a larger size and not lose any image quality. If you blow up a raster graphic, it will look blocky, or "pixelated." When you blow up a vector graphic, the edges of each object within the graphic stay smooth and clean. This makes vector graphics ideal for logos, which can be small enough to appear on a business card, but can also be scaled to fill a billboard. Common types of vector graphics include Adobe Illustrator, Macromedia Freehand, and EPS files. Many Flash animations also use vector graphics, since they scale better and typically take up less space than bitmap images. File extensions: .AI, .EPS, .SVG, .DRW http://techterms.com/definition/vectorgraphic © 2015 Sharpened Productions http://techterms.com/definition/vectorgraphic 1/1 8/21/2015 Raster Graphic Definition Raster Graphic Most images you see on your computer screen are raster graphics. Pictures found on the Web and photos you import from your digital camera are raster graphics. -

Two-Dimensional Analysis of Digital Images Through Vector Graphic Editors in Dentistry: New Calibration and Analysis Protocol Based on a Scoping Review
International Journal of Environmental Research and Public Health Review Two-Dimensional Analysis of Digital Images through Vector Graphic Editors in Dentistry: New Calibration and Analysis Protocol Based on a Scoping Review Samuel Rodríguez-López 1,* , Matías Ferrán Escobedo Martínez 1 , Luis Junquera 2 and María García-Pola 2 1 Department of Operative Dentistry, School of Dentistry, University of Oviedo, C/. Catedrático Serrano s/n., 33006 Oviedo, Spain; [email protected] 2 Department of Oral and Maxillofacial Surgery and Oral Medicine, School of Dentistry, University of Oviedo, C/. Catedrático Serrano s/n., 33006 Oviedo, Spain; [email protected] (L.J.); [email protected] (M.G.-P.) * Correspondence: [email protected]; Tel.: +34-600-74-27-58 Abstract: This review was carried out to analyse the functions of three Vector Graphic Editor applications (VGEs) applicable to clinical or research practice, and through this we propose a two- dimensional image analysis protocol in a VGE. We adapted the review method from the PRISMA-ScR protocol. Pubmed, Embase, Web of Science, and Scopus were searched until June 2020 with the following keywords: Vector Graphics Editor, Vector Graphics Editor Dentistry, Adobe Illustrator, Adobe Illustrator Dentistry, Coreldraw, Coreldraw Dentistry, Inkscape, Inkscape Dentistry. The publications found described the functions of the following VGEs: Adobe Illustrator, CorelDRAW, and Inkscape. The possibility of replicating the procedures to perform the VGE functions was Citation: Rodríguez-López, S.; analysed using each study’s data. The search yielded 1032 publications. After the selection, 21 articles Escobedo Martínez, M.F.; Junquera, met the eligibility criteria. They described eight VGE functions: line tracing, landmarks tracing, L.; García-Pola, M. -
Quickstart Guide
Fonts Plugin Quickstart Guide Page 1 Table of Contents Introduction 3 Licensing 4 Sitewide Typography 5 Basic Settings 7 Advanced Settings 10 Local Hosting 13 Custom Elements 15 Font Loading 18 Debugging 20 Using Google Fonts in Posts & Pages 21 Gutenberg 22 Classic Editor 25 Theme & Plugin Font Requests 27 Troubleshooting 28 Translations 29 Page 2 Welcome! In this Quickstart guide I’m going to show you how you can use Google Fonts to easily transform the typography of your website. By the time you reach the end of this guide, you will be able to effortlessly customize the typography of your website. You will be able to customise the entire website at once, select certain elements, or home in on a single sentence or paragraph. If at any point you get stuck or have a question, we are always available and happy to help via email ([email protected]). Page 3 Licensing Google Fonts uses an Open Source license which permits the fonts to be used in both personal and commercial projects without requiring payment or attribution. Yes. The open source fonts in the Google Fonts catalog are published under licenses that allow you to use them on any website, whether it’s commercial or personal. https://developers.google.com/fonts/faq In contrast, when searching Google Fonts you may come across fonts that are not part of Google Fonts. These belong to “external foundries” and are not Open Source or free to use. Page 4 Sitewide Typography First, we are going to look at how to customize the typography of your entire website at once. -

Web Tracking: Mechanisms, Implications, and Defenses Tomasz Bujlow, Member, IEEE, Valentín Carela-Español, Josep Solé-Pareta, and Pere Barlet-Ros
ARXIV.ORG DIGITAL LIBRARY 1 Web Tracking: Mechanisms, Implications, and Defenses Tomasz Bujlow, Member, IEEE, Valentín Carela-Español, Josep Solé-Pareta, and Pere Barlet-Ros Abstract—This articles surveys the existing literature on the of ads [1], [2], price discrimination [3], [4], assessing our methods currently used by web services to track the user online as health and mental condition [5], [6], or assessing financial well as their purposes, implications, and possible user’s defenses. credibility [7]–[9]. Apart from that, the data can be accessed A significant majority of reviewed articles and web resources are from years 2012 – 2014. Privacy seems to be the Achilles’ by government agencies and identity thieves. Some affiliate heel of today’s web. Web services make continuous efforts to programs (e.g., pay-per-sale [10]) require tracking to follow obtain as much information as they can about the things we the user from the website where the advertisement is placed search, the sites we visit, the people with who we contact, to the website where the actual purchase is made [11]. and the products we buy. Tracking is usually performed for Personal information in the web can be voluntarily given commercial purposes. We present 5 main groups of methods used for user tracking, which are based on sessions, client by the user (e.g., by filling web forms) or it can be collected storage, client cache, fingerprinting, or yet other approaches. indirectly without their knowledge through the analysis of the A special focus is placed on mechanisms that use web caches, IP headers, HTTP requests, queries in search engines, or even operational caches, and fingerprinting, as they are usually very by using JavaScript and Flash programs embedded in web rich in terms of using various creative methodologies.