Video System for Flight Test Facilities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Download the • Event Information Is Stored As a Separate File
AAAATMANIRBHARTTMANIRBHARTAA BYBY HALHAL ONEONE STOPSTOP SOLUTIONSOLUTION FORFOR ALLALL AEROSPAEROSPACEACE NEEDSNEEDS OVERHAUL/UPGRADE • HAL has produced over 4200 • ISO 9001 "Navratna" Company aircraft & over 5200 engines, • ISO 14000 • About 25,000 Employees including 17 types of indigenous • Turnover more than • AS 9100D design. 2.8 Billion USD • HAL has also overhauled over 11000 • NADCAP • Listed Company on BSE aircraft and 33000 engines Certifications and NSE OVERHAUL/UPGRADE To achieve self reliance in design, development, manufacture, upgrade To become a and maintenance of aerospace equipment, diversifying significant into related areas and managing the business in a climate of growing global player in professional competence to achieve world class performance the aerospace standards for global competitiveness and growth in exports. industry. 3 CONTENT 9 TEJAS-LCA 32 AFCC 10 HTT-40 11 DHRUV 12 LCH 13 LUH 14 RUDRA 15 JAGUAR UPGRADE AIRCRAFT FLIGHT CONTROL PLATFORMS PAGE 6 PAGE 17 SYSTEM PAGE 33 ABOUT HAL PAGE 9 Communication, PAGE 31 Navigation & RECORDING Identification SYSTEM systems 6 THE COMPANY 18 DACS 34 SSDVRS 7 PRODUCTION CENTRES 19 ACS 235 35 CVFDR 8 DESIGN COMPLEX 20 SoftNet Radio 36 SSFDR 21 SCDLU 37 CPMM 22 VACS 38 SSFDR/CVR 23 MNS 24 VOR/ILS 25 ADVANCED TACAN 26 RAM 2700A 27 IFFT-2460ALH1 28 IFFI-3400A 29 CIT 30 AIS 4 CONTENT 42 Mission Computer for Mirage 2000 68 TRANSFORMER RECTIFIER UNIT (TRU) 43 Jaguar Darin III 69 AC POWER MANAGEMENT & DISTRIBUTION Mission Computer S YSTEM 44 Mission Computer (MC) 70 ALTERNATOR CONTROL -

Power Supplies for Military Ground Vehicles P 18 P 26 Interview with Paul Hart, Chief Technology Officer (CTO) for Curtiss-Wright Defense Solutions
@military_cots McHale Mergers & safety critical market 5 Special Report GPS-denied environments 14 Mil Tech Trends ARM for hi-rel applications 22 Industry Spotlight Avionics display standards 34 MIL-EMBEDDED.COM Nov/Dec 2016 | Volume 12 | Number 8 Power supplies for military ground vehicles P 18 P 26 Interview with Paul Hart, chief technology officer (CTO) for Curtiss-Wright Defense Solutions Implementing FACE-conformant systems P 30 Embedded Solutions for the next 25 years Size = 70mm x 30mm Acromag Redefines SWaP-C with our New AcroPack® I/O Platform The AcroPack® product line updates our popular Industry Pack I/O modules by Weight = .05 oz. avg using the mPCIe interface format. We added 19mm and a 100 pin connector to provide up to 50 isolated rear I/O signals, giving you a tremendous amount of and capability on an Extremely Small Footprint - Without Cabling! Power = <5 watts per module Designed for COTS applications, these general purpose I/O modules deliver high-speed and high-resolution A/D and D/A, digital I/O, serial communication, - and re-configurable FPGA functions. Whether it’s server-based lab activities, flight Cost = Starting at $310 or ship-based test systems, if you are looking for that ever-shrinking form factor of I/O that allows you to get one step ahead, contact Acromag to discuss how AcroPacks can help you with tomorrow’s applications, today. Key Features Include: ▪ A/D, D/A, serial, digital I/O, counter/timers and FPGA ▪ Low-power consumption ▪ Solid-state electronics ▪ -40 to 85°C standard operating temperature -

High-Speed Datalink Connectors and Cables for Ethernet-Grade Protocols
High-Speed Datalink Connectors and Cables for Ethernet-Grade Protocols Preface: Essential Science and Specifications for High-Speed Datalink Protocols Key information and vocabulary for electrical wire interconnect system engineers designing for high-speed applications Preface: Bandwidth vs. Data Rate (Bits vs. Hertz) . Data Rate: The number of BITS transmitted per unit time. This includes data compression via specialized integrated circuits . Bandwidth: Frequency of the carrier wave Preface: USB 3.1 (Gen 2) vs. 10G-BaseT Ethernet Interconnect selection depends on protocol specifications USB 3.1 10G Ethernet . Data Rate: 10 Gb/s . Data rate: 10 Gb/s . Simplex communication for . Full duplex over 4 pairs. transmit / receive . Up to 500 MHz of bandwidth, . Up to 7.5 GHz bandwidth, 100 ohm 90 ohm . 100 m typical max length, . 5 m typical max length, point-to-point link 6 mated pairs . Powered . Unpowered Preface: Common Ethernet and other High-Speed Signal Protocols Ethernet Mil/Aero Data Bus Peripherals/Display/Video . 10-BaseT . MIL-STD-1553 . USB 2.0/3.0 and SATA . 100-BaseT . CANBUS . DVI/HDMI/Displayport . SMPTE HD/3G-SDI . 1000-BaseT . MIL-STD-1760 . ARINC 818 Video . 10G-BaseT . ARINC-429 . Serial Rapid I/O (sRIO) . IEEE-1394 (Firewire) . FiberChannel . ARINC-664 . PCI Express (PCIe) . Aurora (Xilinx serial I/O) . SGMII / XGMII . Serialized 1 & 10GB Ethernet Preface: Data Protocols: Bandwidth and Distance DVI, HDMI HD/3G-SDI log log Preface: Copper vs. Fiber: Bandwidth and Distance log log Preface: Why is Ethernet so Prevalent? . Ethernet permits lots of data to be efficiently moved (low-bandwidth) over copper cabling . -

Integrated Onboard Networking for Ima2g
INTEGRATED ONBOARD NETWORKING FOR IMA2G Yuriy Sheynin*, Elena Suvorova*, Valentin Bukov**, Vladimir Shurman** *) Saint-Petersburg State University of Aerospace Instrumentation Saint-Petersburg, Russian Federation **) PLC Scientific and Research Institute of Avionic Equipment Zshukovsky, Moscow Region, Russian Federation Keywords: IMA2G, SpaceWire, Zero Maintenance Equipment, Integrated Networking Architecture Abstract Tools) project, [1] has shown, the AFDX The article presents developments of be the IMA2G integrated networking next generation onboard networking for interconnection. With its optimized for IMA2G that is based on the SpaceWire/GigaSpaceWire networking throughput architecture and protocols it has poor latency para technology. The IMA2G prospective vision requirements of time-critical fast-loop could be further strengthen by its integration applications where low latency is the with the Zero Maintenance Equipment (ZME) concepts. The article describes the SpaceWire predominant requirement. As a result, for such based backbone network as an integral parts of the distributed on-board architecture interconnection for IMA2G, gives examples with low latency & short period of applying typical avionics subsystems on requirements, the AFDX networking is SpaceWire based interconnection. reduced to so-called LC-AFDX (Low Capacity AFDX), [2], Field-bus in fact, reduced from scalable switch-based networking back to point-to- 1 Introduction point interconnections. An IMA2G networking technology should IMA2G should cover broader scope of support broad scalability in all domains: in avionics units and subsystems not only data number of nodes, in data rates, in throughput, computing resources. It should move to in latency constraints. Scalability should not distributed computing entity (unlike typically only give a way for reconfiguration, central computing resources in IMA1G), and increase(decrease) number of nodes and cover command/control, signal processing, IO integrated avionics resources gain, but resources also . -

Unit 4 Part 1: Communications – Serial Protocol
1300 Henley Court Pullman, WA 99163 509.334.6306 www.store.digilentinc.com Unit 4 Part 1: Communications – Serial Protocol Revised May 23, 2017 This manual applies to Unit 4 Part 1 1 Introduction “Telecommunication is the transmission of signs, signals, writings, images and sounds or intelligence of any nature by wire, radio, optical, or other electromagnetic systems, as defined by the International Telecommunication Union (ITU). Telecommunication occurs when the exchange of information between communication participants includes the use of technology. It is transmitted either electrically over physical media, such as cables, or via electromagnetic radiation. Such transmission paths are often divided into communication channels which afford the advantages of multiplexing. The term is often used in its plural form, telecommunications, because it involves many different technologies.”1 Telecommunications can be divided into two basic types: digital communications and analog communications. Common residential telephone systems as well as AM and FM radio are forms of analog communications. The focus of this unit is digital communication where the information is communicated as encoded discrete level signals. The digital signals can represent computer generated values or be the result of digitization of analog signals. Serial communications involves sending data one bit at a time. This is opposed to parallel communications where multiple bits of data are sent simultaneously, such as the interface with the character LCD that was the focus of Unit 3. One of the biggest motivations for implementing serial communications is to minimize the number of processor pins and wires needed to pass data between two points. The longer the physical distance between these two points (the endpoints), the more expensive the communications media becomes, whether that is wireless or wired based. -

2016 Annual Report
2016 ANNUAL REPORT SAE ITC ARINC INDUSTRY ACTIVITIES STAFF December 2016 Mike Rockwell Executive Director Sam Buckwalter Jose Godoy Peter Grau Program Director Principal Engineer Principal Engineer AMC & FSEMC Executive Secretary Lori Hess Vanessa Mastros Tom Munns Editorial Assistant Business Manager Program Director Principal Engineer Kate Popp Paul Prisaznuk Scott Smith Editorial Assistant Program Director Principal Engineer AEEC Executive Secretary FSEMC Assistant Executive Secretary “Dedicated to the success of AEEC, AMC, and FSEMC” –Mike Rockwell, Executive Director, SAE ITC TABLE OF CONTENTS SAE ITC ARINC Industry Activities Staff | December 2016 ..........1 ARINC Specification 618-8 .................................................. 48 ARINC Specification 661-6 .................................................. 48 A Message from SAE Industry ARINC Specification 665-4 ................................................. 48 Technologies Consortia (SAE ITC) ......................................4 ARINC Report 676 .................................................................. 48 ARINC Characteristic 771 ..................................................... 49 Message from Industry Activities .................................................6 ARINC Specification 816-2 Change 1 ................................ 49 AEEC | AMC Welcome and Keynote ............................................ 8 ARINC Specification 816-3 .................................................. 49 FSEMC Welcome and Keynote......................................................18 -

HW 5 A2D, Serial, and Time Calculations CENG 5434 Fall 2017 Due 10/16
HW 5 A2D, Serial, and Time Calculations CENG 5434 Fall 2017 Due 10/16 To Go Over In Class. Remember to show all your calculations! Problem 1 10 Points We can state A/D resolution in many ways. For example, the resolution of an n bit A/D converter is given by V V = full-scale value . resolution 2n For an 8-bit A/D with a 5 volt, full-scale range 1. What is the resolution in millivolts? 2. What is the resolution in terms of the % of full-scale value? . Problem 2 10 Points Suppose an A/D converter has a conversion time of 100 µ seconds. 1. What is the sampling frequency? 2. What is the highest frequency that can be sampled without aliasing? . 1 Problem 3 20 Points To choose an A/D converter and program it, we need to know the resolution (number of bits), the sampling rate (time between samples) and the number of points to sample (duration of the sampling period). Assume a sensor outputs .05 ◦ ◦ volts/ C with a range of up to 100 C. How many bit A/D converter is needed ◦ to get a resolution of 0.1 C? . Problem 4 20 Points Suppose we wish to compute the Fourier Transform (FFT)of a signal. We choose the sampling rate based on how fast the sampled signal can change and the duration of sampling based on the resolution in frequency. Note that the A/D is normally programmed to sample every Ts seconds and take N samples. Then, NTs determines the period of each frame of sampling and hense the resolution in frequency as ∆f =1/NTs 1. -

Buses and Networks for Contemporary Avionics by Mike Glass Principal Marketing Engineer Data Device Corporation
Buses and Networks for Contemporary Avionics By Mike Glass Principal Marketing Engineer Data Device Corporation © SAE 2008 (assigned by Data Device Corporation). The SAE’s policy is not to endorse any service or product. November 2007 Buses and Networks for Contemporary Avionics White Paper Buses and Networks for Contemporary Avionics Abstract MIL-STD-1553 has served the needs of military system integrators for over 30 years, particularly in the area of command and control applications. Nevertheless, contemporary applications such as high-speed digitized sensors, file transfers, processor clusters, and displays require much higher data rates than 1553’s 1Mb/s. For some environments, particularly for legacy aircraft, the optional solution is to transmit faster data rates over existing 1553 buses. However, there are other applications that can accommodate and benefit by the deployment of gigabit or multi-gigabit copper or optical switched fabric networks. In addition to MIL-STD-1553, this paper presents and comments about several avionics networking technologies including High-Speed 1553, Fibre Channel, Gigabit Ethernet, and ARINC 664, a form of profiled Ethernet. Introduction For decades, MIL-STD-1553 has served as the workhorse networking standard for the integration of military/aerospace avionics platforms. However, modern avionics applications provide increasing demands for network bandwidth beyond 1 Mb/s. In addition to 1553’s traditional command and control functions, these applications include processor and DSP clusters, digitized sensor interfacing, displays, file transfers, and data storage. This paper discusses the directions in which military avionics networks are now evolving. One nascent trend is the use of modern telecommunication modulation techniques for providing order(s) of magnitude increase in data rate while leveraging the existing 1553 cable infrastructure. -

COCKPIT4000 Nexgen
COCKPIT4000 NexGen Digital SparrowHawk™ Head Up Display • Stroke only or stroke on full-frame raster images • Total: 26° field of view • Luminance capability allows contrast ratio of 1.2 to 1 against 10,000 fL ambient background • Type 1 and Type II Class B and Class C Night Vision Goggle (NVG) compatible • Electronic boresighting capability • Weight: 30 lb/13.6 kg • Display color: green • Dual combiner: 70% photopic transmission • Aperture: 5° Large Area Display • Viewable area: 20” x 8” • Resolution: 2560 X 1024, 24-bit color (256 grayscale) 2 times 1280 X 1024 • Luminance: .025 to 260 fL • Viewing angle: +/- 30° horizontal, +/- 45° vertical no color reversal • Touchscreen: Resistive • Backlight: Dual source Light-Emitting Diode (LED) backlight • Power: 28 VDC, 300W (max), MIL-STD-704 • NVIS display: NVIS, type I/II, class B, per MIL-L-85762 • Signal interface: Serial communication (RS-232, RS-422 & RS-485), 4x MIL-STD-1553B, 14x ARINC-429 in (Dual speed), 6x ARINC-429 out (Dual speed), • Dimensions: 21.5” X 9.5” X 5.6” 3x Ethernet 10/100/1000 MB, USB V2.0, CAN bus (ARINC-825 option), • Weight: 30 lb (max) 50x Discrete inputs, 40x Discrete outputs, Analog inputs with excitation • Cooling: Natural convection with fans • Video interface: 4x DVI out, 4x RGB in, 2x Composite in/out, 2x ARINC 818 in/out For further information, please send your request to: [email protected] Configurable Glass Cockpit for Military Trainer and ISR/Attack Aircraft • Next-generation avionics for optimum • Increased mission efficiency and flight safety human performance • Low-profile digital HUD • Configurable displays representative of • Smart 20” x 8” large area display with touchscreen front-line fighters • Open mission system architecture • Seamless cross-platform training flexibility For information purposes only. -

Serial Data Transfer Schemes
Microprocessors and Microcontrollers P a g e | 1 UNIT-5 SERIAL DATA TRANSFER SCHEMES SERIAL COMMUNICATION INTRODUCTION Serial communication is common method of transmitting data between a computer and a peripheral device such as a programmable instrument or even another computer. Serial communication transmits data one bit at a time, sequentially, over a single communication line to a receiver. Serial is also a most popular communication protocol that is used by many devices for instrumentation. This method is used when data transfer rates are very low or the data must be transferred over long distances and also where the cost of cable and synchronization difficulties makes parallel communication impractical. Serial communication is popular because most computers have one or more serial ports, so no extra hardware is needed other than a cable to connect the instrument to the computer or two computers together. SERIAL AND PARALLEL TRANSMISSION Let us now try to have a comparative study on parallel and serial communications to understand the differences and advantages & disadvantages of both in detail. We know that parallel ports are typically used to connect a PC to a printer and are rarely used for other connections. A parallel port sends and receives data eight bits at a time over eight separate wires or lines. This allows data to be transferred very quickly. However, the setup looks more bulky because of the number of individual wires it must contain. But, in the case of a serial communication, as stated earlier, a serial port sends and receives data, one bit at a time over one wire. -
Resource Guide P 46
@military_cots John McHale Healthy defense electronics market 7 Technology Update Tackling Moore’s Law 9 Market Analysis Defense Electronics Overview 18 Special Report Helping next-gen chips keep cool 28 MIL-EMBEDDED.COM September 2018 | Volume 14 | Number 6 2018 RESOURCE GUIDE P 46 U.S. attack submarine fleet expands and gets P 22 sonar, COTS upgrades P 42 No room for compromise in supply chain security: New DoD initiative establishes benchmark for strategic ICT sourcing – By Phil Gallagher, Avnet Taking military communication to the next level with SIC P 36 When it comes to VPX, one company has the most flavorS O N LY VPXtra® OFFERS THE LARGEST SELECTION OF MIL-SPEC POWER SUPPLIES, WITH MINIMAL COSTS FOR ANY ADDITIONAL CUSTOMIZATION Most manufacturers offer just a few VPX power supplies off the shelf, with high costs for full-custom. The Behlman VPXtra® series offers the most COTS AC to DC and DC to DC units configured for a wide range of high-end industrial and military applications. All feature our state-of-the-art new engineering standard, Xtra-reliable design and Xtra-rugged construction. Insist on the leader. Not just VPX, VPXtra®. The Power Solutions Provider AC POWER SUPPLIES / INVERTERS COTS POWER SUPPLIES FREQUENCY CONVERTERS : 631-435-0410 : [email protected] : www.behlman.com 5192-BehlmanElectronics_Ad_Military_Embedded_Systems_NOV17.indd 1 10/12/17 9:25 AM MILITARY & AEROSPACE INTERCONNECTS AT THE READY From high volume production, to low-volume customized products, MilesTek is your source for Military, aerospace, communications and industrial interconnect solutions. With quick turnaround and same-day shipping from our stock of over 10,000 high reliability products, MilesTek is at the ready to help meet your project deadlines. -
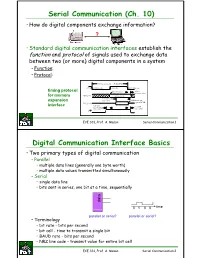
Serial Communication (Ch. 10) Digital Communication Interface Basics
Serial Communication (Ch. 10) • How do digital components exchange information? ? • Standard dig ital communi cati on interfaces establish the function and protocol of signals used to exchange data between two (or more) digital components in a system – Function: –Protocol: CPU cycle time [s] = 1/ECLK [Hz] ECLK 1st falling edge rising edge 2nd falling edge timing protocol address valid on address rising edge of ECLK hold time: 20 ns for memory ADDR[15:0] address invalid address valid read data setup expansion time: 30 ns valid data on 2nd falling edge of ECLK DATA[15:0] read valid interface read hold time to ECLK time : 20 ns rise : 20 ns R/W ECE 331, Prof. A. Mason Serial Communication.1 Digital Communication Interface Basics • Two primary types of digital communication – Parallel •mullltiple data lines (genera lly one byte worth) • multiple data values transmitted simultaneously –Serial • single data line • bits sent in series, one bit at a time, sequentially data 0 1 0 0 time parallel or serial? parallel or serial? – Terminology • bit rate - bits per secon d • bit cell - time to transmit a single bit • BAUD rate - bits per second •NRZ line code -transmit value for entire bit cell ECE 331, Prof. A. Mason Serial Communication.2 Features of Serial Interfaces • Synchronous vs. Asynchronous –synchronous= data bits read at clock edge –asynchronous = no cllkock; data read at preset interval CLK Syyynchronous or asynchronous? Data • To/from (out/in, transmit/receive) separate or shared – separate: data can be transmitted & received simultaneously • similar to “full duplex” • for hardwired communication,,q requires multip le data lines – shared: data either incoming or outgoing (not both) at any given time • similar to “half duplex” • for hardwired communication, requires only one data line full duplex half duplex ECE 331, Prof.