Freight Train Positive Train Control Braking Enforcement Algorithm Research and Testing DTFR53-11-D-00008 Task Order 312 6
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

C) Rail Transport
EUROPEAN PARLIAMENT WORKING DOCUMENT LOGISTICS SYSTEMS IN COMBINED TRANSPORT 3743 EN 1-1998 This publication is available in the following languages: FR EN PUBLISHER: European Parliament Directorate-General for Research L-2929 Luxembourg AUTHOR: Ineco - Madrid SUPERVISOR: Franco Piodi Economic Affairs Division Tel.: (00352) 4300-24457 Fax : (00352) 434071 The views expressed in this document are those of the author.and do not necessarily reflect the official position of the European Parliament. Reproduction and translation are authorized, except for commercial purposes, provided the source is acknowledged and the publisher is informed in advance and forwarded a copy. Manuscript completed in November 1997. Logistics systems in combined transport CONTENTS Page Chapter I INTRODUCTION ........................................... 1 Chapter I1 INFRASTRUCTURES FOR COMBINED TRANSPORT ........... 6 1. The European transport networks .............................. 6 2 . European Agreement on Important International Combined Transport Lines and related installations (AGTC) ................ 14 3 . Nodal infrastructures ....................................... 25 a) Freight villages ......................................... 25 b) Ports and port terminals ................................... 33 c) Rail/port and roadrail terminals ............................ 37 Chapter I11 COMBINED TRANSPORT TECHNIQUES AND PROBLEMS ARISING FROM THE DIMENSIONS OF INTERMODAL UNITS . 56 1. Definitions and characteristics of combined transport techniques .... 56 2 . Technical -

2004 Freight Rail Component of the Florida Rail Plan
final report 2004 Freight Rail Component of the Florida Rail Plan prepared for Florida Department of Transportation prepared by Cambridge Systematics, Inc. 4445 Willard Avenue, Suite 300 Chevy Chase, Maryland 20815 with Charles River Associates June 2005 final report 2004 Freight Rail Component of the Florida Rail Plan prepared for Florida Department of Transportation prepared by Cambridge Systematics, Inc. 4445 Willard Avenue, Suite 300 Chevy Chase, Maryland 20815 with Charles River Associates Inc. June 2005 2004 Freight Rail Component of the Florida Rail Plan Table of Contents Executive Summary .............................................................................................................. ES-1 Purpose........................................................................................................................... ES-1 Florida’s Rail System.................................................................................................... ES-2 Freight Rail and the Florida Economy ....................................................................... ES-7 Trends and Issues.......................................................................................................... ES-15 Future Rail Investment Needs .................................................................................... ES-17 Strategies and Funding Opportunities ...................................................................... ES-19 Recommendations........................................................................................................ -

Etir Code Lists
eTIR Code Lists Code lists CL01 Equipment size and type description code (UN/EDIFACT 8155) Code specifying the size and type of equipment. 1 Dime coated tank A tank coated with dime. 2 Epoxy coated tank A tank coated with epoxy. 6 Pressurized tank A tank capable of holding pressurized goods. 7 Refrigerated tank A tank capable of keeping goods refrigerated. 9 Stainless steel tank A tank made of stainless steel. 10 Nonworking reefer container 40 ft A 40 foot refrigerated container that is not actively controlling temperature of the product. 12 Europallet 80 x 120 cm. 13 Scandinavian pallet 100 x 120 cm. 14 Trailer Non self-propelled vehicle designed for the carriage of cargo so that it can be towed by a motor vehicle. 15 Nonworking reefer container 20 ft A 20 foot refrigerated container that is not actively controlling temperature of the product. 16 Exchangeable pallet Standard pallet exchangeable following international convention. 17 Semi-trailer Non self propelled vehicle without front wheels designed for the carriage of cargo and provided with a kingpin. 18 Tank container 20 feet A tank container with a length of 20 feet. 19 Tank container 30 feet A tank container with a length of 30 feet. 20 Tank container 40 feet A tank container with a length of 40 feet. 21 Container IC 20 feet A container owned by InterContainer, a European railway subsidiary, with a length of 20 feet. 22 Container IC 30 feet A container owned by InterContainer, a European railway subsidiary, with a length of 30 feet. 23 Container IC 40 feet A container owned by InterContainer, a European railway subsidiary, with a length of 40 feet. -

Economics of Improved TOFC/COFC Systems Robert H
6 basis. On a "maximum" cost basis, however, the ser high-rate service. At profitable rates, the Philadelphia vice is unprofitable at all rate levels. Cleveland and Chicago-Houston services would carry only 13 and 21 trailers a day, respectively. This dif Chicago-Houston City Pair fers from the more conventional concept of a TOFC shuttle train service, such as the "Slingshot," which The long distance between Chicago and Houston dis emphasizes low rates and high volume. It would be tinguishes this city pair from the other two. Al interesting to repeat this analysis assuming a lower though both rail and truck service tends to be fairly cost, but slower, less reliable service. It is possible good, a reliable TOFC shuttle train service is believed that such a service might prove more profitable than to offer some improvement in service over both. De the premium service hypothesized here. spite its long distance, the traffic between this pair of These models have allowed us to understand the cities is fairly heavy-roughly the same as between consequences of the multitude of individual firm deci Philadelphia and Cleveland. One might speculate that sions that will determine the market for a service. As the economies of rail line-haul operation would make such, they represent a considerable advance over other a TOFC shuttle train a profitable undertaking between methods, such as aggregate econometric models, which this pair of cities. require gross assumptions about the relationship of Figure 4 presents the comparison of revenues and transportation demand to the economy of a region. costs at various rate levels for the Chicago-Houston Better industry data, production-type demand models, TOFC shuttle train service. -

Investing in Mobility
Investing in Mobility FREIGHT TRANSPORT IN THE HUDSON REGION THE EAST OF HUDSON RAIL FREIGHT OPERATIONS TASK FORCE Investing in Mobility FREIGHT TRANSPORT IN THE HUDSON REGION Environmental Defense and the East of Hudson Rail Freight Operations Task Force On the cover Left:Trucks exacerbate crippling congestion on the Cross-Bronx Expressway (photo by Adam Gitlin). Top right: A CSX Q116-23 intermodal train hauls double-stack containers in western New York. (photo by J. Henry Priebe Jr.). Bottom right: A New York Cross Harbor Railroad “piggypacker” transfers a low-profile container from rail to a trailer (photo by Adam Gitlin). Environmental Defense is dedicated to protecting the environmental rights of all people, including the right to clean air, clean water, healthy food and flourishing ecosystems. Guided by science, we work to create practical solutions that win lasting political, economic and social support because they are nonpartisan, cost-effective and fair. The East of Hudson Rail Freight Operations Task Force is committed to the restoration of price- and service-competitive freight rail service in the areas of the New York metropolitan region east of the Hudson River. The Task Force seeks to accomplish this objective through bringing together elected officials, carriers and public agencies at regularly scheduled meetings where any issue that hinders or can assist in the restoration of competitive rail service is discussed openly. It is expected that all participants will work toward the common goal of restoring competitive rail freight service East of the Hudson. ©2004 Environmental Defense Printed on 100% (50% post-consumer) recycled paper, 100% chlorine free. -

1997 Comprehensive Truck Size and Weight Study
I I I I Ndlnlffilbway I M• · ◄ '"llicaa 1997 Fan! RaiJraad ~t ·· ..... I Comprehensive N--a HipwayTrdie I Sa&ly Admia.iaaalica Bur-.at Truck T11G1pU111dian ~ I Size and Weight I Study I -I I I DRAFT I Volume II I Issues and Background I June 1997 I TL 230 I C887 I I I I I I I I I I I I I I I I I I I I I I ·I I I 1997 I Comprehensive I Truck I Size and Weight I Study I -I I I DRAFT I I Volume II Issues and Background I June 1997 I I I rvtTA LIBRARY I I I I I I I I I I I I I I I' I .1 I I I I I Table ofContents I Chapter 1: Background and Overview I Introduction I-1 Purpose 1-2 I Approach I-4 Impact Areas Assessed . 1-4 I Alternatives Evaluation . 1-6 Building Blocks: Configuration. System and Geography . I-6 Illustrative Scenario Options . I-8 I Guiding Principles, Oversight and Outreach I-9 Guiding Principles . I-9 I National Freight Transportation Policy Statement . 1-9 Coordination with Highway Cost Allocation Study. I- IO Oversight. I-1 O I Internal Departmental: Policy Oversight Group. I- IO Public Outreach . I-11 I Context I-15 The Transponation Environment. 1-15 I Current Federal Truck Size and Weight Regulations . 1-17 Weight. I-19 Size . I-21 I Study Presentation 1-22 Overview . 1-22 I Organization of Volume II: Background and Issues . I-22 Truck Size and Weight Regulations . -
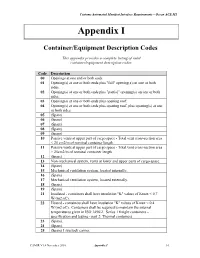
Appendix I – Container/Equipment Description Codes
Customs Automated Manifest Interface Requirements – Ocean ACE M1 Appendix I Container/Equipment Description Codes This appendix provides a complete listing of valid container/equipment description codes. Code Description 00 Openings at one end or both ends. 01 Opening(s) at one or both ends plus "full" opening(s) on one or both sides. 02 Opening(s) at one or both ends plus "partial" opening(s) on one or both sides. 03 Opening(s) at one or both ends plus opening roof. 04 Opening(s) at one or both ends plus opening roof, plus opening(s) at one or both sides. 05 (Spare) 06 (Spare) 07 (Spare) 08 (Spare) 09 (Spare) 10 Passive vents at upper part of cargo space - Total vent cross-section area < 25 cm2/m of nominal container length. 11 Passive vents at upper part of cargo space - Total vent cross-section area > 25cm2/m of nominal container length. 12 (Spare) 13 Non-mechanical system, vents at lower and upper parts of cargo space. 14 (Spare) 15 Mechanical ventilation system, located internally. 16 (Spare) 17 Mechanical ventilation system, located externally. 18 (Spare) 19 (Spare) 21 Insulated - containers shall have insulation "K" values of Kmax < 0.7 W/(m2.oC). 22 Heated - containers shall have insulation "K" values of Kmax < 0.4 W/(m2.oC). Containers shall be required to maintain the internal temperatures given in ISO 1496/2. Series 1 freight containers – specification and testing - part 2: Thermal containers. 23 (Spare). 24 (Spare). 25 (Spare) Livestock carrier. CAMIR V1.4 November 2010 Appendix I I-1 Customs Automated Manifest Interface Requirements – Ocean ACE M1 Code Description 26 (Spare) Automobile carrier. -
Michigan's Railroad History
Contributing Organizations The Michigan Department of Transportation (MDOT) wishes to thank the many railroad historical organizations and individuals who contributed to the development of this document, which will update continually. Ann Arbor Railroad Technical and Historical Association Blue Water Michigan Chapter-National Railway Historical Society Detroit People Mover Detroit Public Library Grand Trunk Western Historical Society HistoricDetroit.org Huron Valley Railroad Historical Society Lansing Model Railroad Club Michigan Roundtable, The Lexington Group in Transportation History Michigan Association of Railroad Passengers Michigan Railroads Association Peaker Services, Inc. - Brighton, Michigan Michigan Railroad History Museum - Durand, Michigan The Michigan Railroad Club The Michigan State Trust for Railroad Preservation The Southern Michigan Railroad Society S O October 13, 2014 Dear Michigan Residents: For more than 180 years, Michigan’s railroads have played a major role in the economic development of the state. This document highlights many important events that have occurred in the evolution of railroad transportation in Michigan. This document was originally published to help celebrate Michigan’s 150th birthday in 1987. A number of organizations and individuals contributed to its development at that time. The document has continued to be used by many since that time, so a decision was made to bring it up to date and keep the information current. Consequently, some 28 years later, the Michigan Department of Transportation (MDOT) has updated the original document and is placing it on our website for all to access. As you journey through this history of railroading in Michigan, may you find the experience both entertaining and beneficial. MDOT is certainly proud of Michigan’s railroad heritage. -

Railroad Emergency Response Manual
Metropolitan Washington Council of Governments Railroad Emergency Response Manual Approved by the COG Fire Chiefs Committee Metropolitan Washington Council of Governments Second Edition May 2020 MWCOG Railroad Emergency Response Manual 2nd Edition – May 2020 ACKNOWLEDGEMENTS This manual could not have been written without the assistance of many Dedicated rail safety personnel and members of the Metropolitan Washington Council of Governments regional emergency response agencies that have spent many hours providing the material for the creation of this manual. We thank all emergency responders from all jurisdictions, including our federal agency partners that shared their firsthand experiences of recent commuter railroad incidents. Many of their experiences were incorporated into sections of this manual. Many Railroad representatives, private industry and governmental organizations provided their invaluable technical assistance. This committee would like to thank Steve Truchman formerly of the National Railroad Passenger Corporation (Amtrak), Greg Deibler from Virginia Railway Express (VRE), David Ricker from the Maryland Rail Commuter (MARC), Paul Williams of Norfolk Southern Railway Corporation and Mike Hennessey of CSX Transportation, all of whom provided the specific diagrams, illustrations and other technical information regarding railroad equipment. We recognize Elisa Nichols of Kensington Consulting, LLC for her contributions to this manual as well as representatives from many Federal Agencies who also provided information on the technical accounts of railroad equipment and their integrity on past railroad incidents. The members of the Metropolitan Washington Council of Governments (COG) Passenger Rail Safety Subcommittee gratefully presents this manual to both Fire and Rescue Service and Railroad organizations in an effort to instill readiness within our own personnel that they might effectively and collaboratively respond to a railroad incident. -
Proper Car Placement in Trains
Proper Car Placement in Trains Presented by DuPage Division Midwest Region NMRA . Presented at Badgerland Express Madison, Wisconsin JJam Introduction Some of you may wonder why it is important to know that cars can be placed in the wrong order in a train. And, why does this even matter on a model railroad? On a real railroad improper car placement can cause embarrassing situations such as this .............. (Picture a train wreck.) Proper car placement also insures the general safety of.... The merchandise being transported The safety of the train crews handling the cars and the train The safety of the community thru which these cars may move. Some of these rules can be utilized to make the operation of your models more prototypical. The last reason I can think of for knowing this valuable information is that you can use it to heckle another modeler about his operation. ("Do you know that that tank car is in the wrong place in that train?") How do you know how to properly place cars in a train? There are a whole bunch of rulebooks. charts and other documents that trainmen must be familiar with when switching and operating trains. Every railroad has a "Book of Rules" which is the basis of this information. Superceding the "Book of Rules" is the Time Table and Special Instructions which is specific to a certain portion of the railroad. This is superceded by the System and General Bulletins. The most specific information is found in the Train Messages which are issued with every work order. Here is the hierarchy triangle: SYSTEM AND GENERAL BULLETINS TIME TABLE AND SPECIAL INSTRUCTIONS GENERAL OPERATING RULES (BOOK) lets start with a few general rules to set the stage: Rule A Employees whose duties are governed by these rule must provide themselves with a copy of these rules... -

Transportation: Past, Present and Future “From the Curators”
Transportation: Past, Present and Future “From the Curators” Transportationthehenryford.org in America/education Table of Contents PART 1 PART 2 03 Chapter 1 85 Chapter 1 What Is “American” about American Transportation? 20th-Century Migration and Immigration 06 Chapter 2 92 Chapter 2 Government‘s Role in the Development of Immigration Stories American Transportation 99 Chapter 3 10 Chapter 3 The Great Migration Personal, Public and Commercial Transportation 107 Bibliography 17 Chapter 4 Modes of Transportation 17 Horse-Drawn Vehicles PART 3 30 Railroad 36 Aviation 101 Chapter 1 40 Automobiles Pleasure Travel 40 From the User’s Point of View 124 Bibliography 50 The American Automobile Industry, 1805-2010 60 Auto Issues Today Globalization, Powering Cars of the Future, Vehicles and the Environment, and Modern Manufacturing © 2011 The Henry Ford. This content is offered for personal and educa- 74 Chapter 5 tional use through an “Attribution Non-Commercial Share Alike” Creative Transportation Networks Commons. If you have questions or feedback regarding these materials, please contact [email protected]. 81 Bibliography 2 Transportation: Past, Present and Future | “From the Curators” thehenryford.org/education PART 1 Chapter 1 What Is “American” About American Transportation? A society’s transportation system reflects the society’s values, Large cities like Cincinnati and smaller ones like Flint, attitudes, aspirations, resources and physical environment. Michigan, and Mifflinburg, Pennsylvania, turned them out Some of the best examples of uniquely American transporta- by the thousands, often utilizing special-purpose woodwork- tion stories involve: ing machines from the burgeoning American machinery industry. By 1900, buggy makers were turning out over • The American attitude toward individual freedom 500,000 each year, and Sears, Roebuck was selling them for • The American “culture of haste” under $25. -
Class I Railroad Annual Report
OEEAA – R1 OMB Clearance No. 2140-0009 Expiration Date 12-31-2022 Class I Railroad Annual Report Norfolk Southern Combined Railroad Subsidiaries Three Commercial Place Norfolk, VA 23510-2191 Full name and address of reporting carrier Correct name and address if different than shown (Use mailing label on original, copy in full on duplicate) To the Surface Transportation Board For the year ending December 31, 2019 Road Initials: NS Rail Year: 2019 ANNUAL REPORT OF NORFOLK SOUTHERN COMBINED RAILROAD SUBSIDIARIES ("NS RAIL") TO THE Surface Transporation Board FOR THE YEAR ENDED DECEMBER 31, 2019 Name, official title, telephone number, and office address of officer in charge of correspondence with the Board regarding this report: (Name) Jason A. Zampi (Title) Vice President and Controller (Telephone number) (757) 629-2680 (Area Code) (Office address) Three Commercial Place Norfolk, Virginia 23510-2191 (Street and number, city, state, and ZIP code) Railroad Annual Report R-1 NOTICE 1. This report is required for every class I railroad operating within the United States. Three copies of this Annual Report should be completed. Two of the copies must be filed with the Surface Transportation Board, Office of Economics, Environmental Analysis, and Administration, 395 E Street, S.W. Suite 1100, Washington, DC 20423, by March 31 of the year following that for which the report is made. One copy should be retained by the carrier. 2. Every inquiry must be definitely answered. Where the word "none" truly and completely states the fact, it should be given as the answer. If any inquiry is inapplicable, the words "not applicable" should be used.