Objectives of Image Coding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
DELTA MODULATION CODEC Meets Mil-Std-188-113 Features
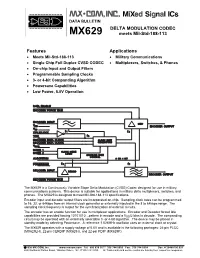
DATA BULLETIN DELTA MODULATION CODEC MX629 meets Mil-Std-188-113 Features Applications Meets Mil-Std-188-113 Military Communications Single Chip Full Duplex CVSD CODEC Multiplexers, Switches, & Phones On-chip Input and Output Filters Programmable Sampling Clocks 3- or 4-bit Companding Algorithm Powersave Capabilities Low Power, 5.0V Operation ➤ ➤ ➤ ➤➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤➤➤ ➤ The MX629 is a Continuously Variable Slope Delta Modulation (CVSD) Codec designed for use in military communications systems. This device is suitable for applications in military delta multiplexers, switches, and phones. The MX629 is designed to meet Mil-Std-188-113 specifications. Encoder input and decoder output filters are incorporated on-chip. Sampling clock rates can be programmed to 16, 32, or 64kbps from an internal clock generator or externally injected in the 8 to 64kbps range. The sampling clock frequency is output for the synchronization of external circuits. The encoder has an enable function for use in multiplexer applications. Encoder and Decoder forced idle capabilities are provided forcing 10101010…pattern in encode and a VDD/2 bias in decode. The companding circuit may be operated with an externally selectable 3- or 4-bit algorithm. The device may be placed in standby mode by selecting Powersave. A reference 1.024MHz oscillator uses an external clock or crystal. The MX629 operates with a supply voltage of 5.0V and is available in the following packages: 24-pin PLCC (MX629LH), 22-pin CERDIP (MX629J), and 22-pin PDIP (MX629P). 1998 MX-COM, Inc. www.mxcom.com Tel: 800 638 5577 336 744 5050 Fax: 336 744 5054 Doc. # 20480190.001 4800 Bethania Station Road, Winston-Salem, NC 27105-1201 USA All Trademarks and service marks are held by their respective companies. -

The Mizoram Gazette EXTRA ORDINARY Published by Authority RNI No
- 1 - Ex-59/2012 The Mizoram Gazette EXTRA ORDINARY Published by Authority RNI No. 27009/1973 Postal Regn. No. NE-313(MZ) 2006-2008 Re. 1/- per page VOL - XLI Aizawl, Thursday 9.2.2012 Magha 20, S.E. 1933, Issue No. 59 NOTIFICATION No.A.45011/1/2010-P&AR(GSW), the 3rd February, 20122012. In exercise of the powers conferred by the proviso to Article 309 of the Constitution of India, the Governor of Mizoram is pleased to make the following Regulations relating to the Mizoram Civil Services (Combined Competitive) Examinations, namely:- 1. SHORT TITLE AND COMMENCEMENT: (i) These Regulations may be called the Mizoram Civil Services (Combined Competitive Examination) Regulations, 2011. (ii) They shall come into force from the date of their publication in the Mizoram Gazette. (iii) These Regulations shall cover recruitment examination to the Junior Grade of the Mizoram Civil Service (MCS), the Mizoram Police Service (MPS), the Mizoram Finance & Accounts Service (MF&AS) and the Mizoram Information Service (MIS). 2. DEFINITIONS: In these regulations, unless the context otherwise requires:- (i) ‘Constitution’ means the Constitution of India; (ii) ‘Commission’ means the Mizoram Public Service Commission; (iii) ‘Examination’ means a Combined Competitive Examination for recruitment to the Junior Grade of MCS, MPS, MFAS and MIS; (iv) ‘Government’ means the State Government of Mizoram; (v) ‘Governor’ means the Governor of Mizoram; (vi) ‘List’ means the list of successful candidates in the written examination and selected candidates prepared by the Commission -

Digital Communications GATE Online Coaching Classes
GATE Online Coaching Classes Digital Communications Online Class-4 By Dr.B.Leela Kumari Assistant Professor, Department of Electronics and Communications Engineering University college of Engineering Kakinada Jawaharlal Nehru Technological University Kakinada 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 1 Session -4 Baseband Transmission • Delta Modulation • advantages and Draw Backs • SNR of DM • Adaptive Delta Modulation • Comparisons • Objective Type questions and Illustrative Problems 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 2 Delta Modulation • By the DM technique an analog signal can be encoded in to bits .hence in one sense a DM is also PCM • IN DM difference signal is encoded into just a single bit ,hence in one sense a DM is also DPCM • A single bit produces just two possibilities that is used to increase or decrease the estimate 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 3 Block diagram of DM 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 4 The DM consists of Comparator Sample and Hold circuit Up-Down Counter D/A Converter 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 5 Comparator makes a comparison between the input base band signal m(t) and its quantized approximation Δ(t) =V(H) =V(L) Up-Down counter increments or decrements its count by one at each active edge of the clock waveform The count direction(incrementing or decrementing ) is determined by the voltage levels t the “count direction command “ input to the counter When this binary input which is also transmitted output S0(t) ,is at level V(H),the counter counts up, When it is at level V(L),the counter counts down The counter serves as accumulator D/ Converter: The digital output of the converter is converted to the analog quantized approximation by the D/ Converter 6/24/2020 Dr. -

The Scientist and Engineer's Guide to Digital Signal Processing
Index 643 Index A-law companding, 362-364 Brackets, indicating discrete signals, 87 Accuracy, 32-34 Brightness in images, 387-391 Additivity, 89-91, 185-187 Butterfly calculation in FFT, 231-232 Algebraic reconstruction technique (ART), Butterworth filter. See under Filters 444-445 Aliasing C program, 67, 77, 520 frequency domain, 196-200, 212-214, Cascaded stages, 96, 133. See also under 220-222, 372 Filters- recursive in sampling, 39-45 Caruso, restoration of recordings by, 304-307 sinc function, equation for aliased, 212-214 CAT scanner. See Computed tomography time domain, 194-196, 300 Causal signals and systems, 130 Alternating current (AC), defined, 14 CCD. See Charge coupled device Amplitude modulation (AM), 204-206, Central limit theorem, 30, 135-136, 407 216-217, 370 Cepstrum, 371 Analysis equations. See under Fourier Charge coupled device (CCD), 381-385, transform 430-432 Antialias filter. See under filters- analog Charge sensitive amplifier, in CCD, 382-384 Arithmetic encoding, 486 Chebyshev filter. See under Filters Artificial neural net, 458. See also Neural Chirp signals and systems, 222-224 network Chrominance signal, in television, 386 Artificial reverberation in music, 5 Circular buffer, 507 ASCII codes, table of, 484 Circularity. See under Discrete Fourier Aspect ratio of television, 386 transform Assembly program, 76-77, 520 Classifiers, 458 Astrophotography, 1, 10, 373-375, 394-396 Close neighbors in images, 439 Audio processing, 5-7, 304-307, 311, 351-372 Closing, morphological, 437 Audio signaling tones, detection of, 293 Coefficient of variation (CV), 17 Automatic gain control (AGC), 370 Color, 376, 379-381, 386 Compact laser disc (CD), 359-362 Backprojection, 446-450 Complex logarithm, 372 Basis functions Complex numbers discrete Fourier transform, 150-152, addition, 553-554 158-159 associative property, 554 discrete cosine transform, 496-497 commutative property, 5054 Bessel filter. -
Laboratory Manual
DEPARTMENT OF ELECTRICAL & COMPUTER ENGINEERING EEL 4515 FUNDAMENTALS OF DIGITAL COMMUNICATION LABORATORY MANUAL Revised August 2018 Table of Content • Safety Guidelines • Lab instructions • Troubleshooting hints • Experiment 1: Time Division Multiplexing 1 • Experiment 2: Pulse Code Modulation 5 • Experiment 3: Delta Modulation 15 • Experiment 4: Line Coding (Manchester) 21 • Experiment 5: Frequency Shift Keying 25 • Experiment 6: Phase Shift Keying 33 • Experiment 7: Matlab Project 40 Safety Rules and Operating Procedures 1. Note the location of the Emergency Disconnect (red button near the door) to shut off power in an emergency. Note the location of the nearest telephone (map on bulletin board). 2. Students are allowed in the laboratory only when the instructor is present. 3. Open drinks and food are not allowed near the lab benches. 4. Report any broken equipment or defective parts to the lab instructor. Do not open, remove the cover, or attempt to repair any equipment. 5. When the lab exercise is over, all instruments, except computers, must be turned off. Return substitution boxes to the designated location. Your lab grade will be affected if your laboratory station is not tidy when you leave. 6. University property must not be taken from the laboratory. 7. Do not move instruments from one lab station to another lab station. 8. Do not tamper with or remove security straps, locks, or other security devices. Do not disable or attempt to defeat the security camera. ANYONE VIOLATING ANY RULES OR REGULATIONS MAY BE DENIED ACCESS TO THESE FACILITIES. I have read and understand these rules and procedures. I agree to abide by these rules and procedures at all times while using these facilities. -

Digital Transmission Is the Transmittal of Digital Signals Between Two Or More Points in a Communications System
Shri Vishnu Engineering College for Women :: Bhimavaram Department of Electronics & Communication Engineering Digital Communication UNIT I PULSE DIGITAL MODULATION Digital Transmission is the transmittal of digital signals between two or more points in a communications system. The signals can be binary or any other form of discrete-level digital pulses. Digital pulses can not be propagated through a wireless transmission system such as earth’s atmosphere or free space. Alex H. Reeves developed the first digital transmission system in 1937 at the Paris Laboratories of AT & T for the purpose of carrying digitally encoded analog signals, such as the human voice, over metallic wire cables between telephone offices. Advantages & disadvantages of Digital Transmission Advantages --Noise immunity --Multiplexing(Time domain) --Regeneration --Simple to evaluate and measure Disadvantages --Requires more bandwidth --Additional encoding (A/D) and decoding (D/A) circuitry Pulse Modulation --Pulse modulation consists essentially of sampling analog information signals and then converting those samples into discrete pulses and transporting the pulses from a source to a destination over a physical transmission medium. --The four predominant methods of pulse modulation: 1) pulse width modulation (PWM) 2) pulse position modulation (PPM) 3) pulse amplitude modulation (PAM) 4) pulse code modulation (PCM). Pulse Width Modulation --PWM is sometimes called pulse duration modulation (PDM) or pulse length modulation (PLM), as the width (active portion of the duty cycle) of a constant amplitude pulse is varied proportional to the amplitude of the analog signal at the time the signal is sampled. --The maximum analog signal amplitude produces the widest pulse, and the minimum analog signal amplitude produces the narrowest pulse. -

Source Coding Matlab.Pdf
Source Coding Source Coding The Communications Toolbox includes some basic functions for source coding. Source coding, also known as quantization or signal formatting, includes the concepts of analog-to-digital conversion and data compression. Source coding divides into two basic procedures: source encoding and source decoding. Source encoding converts a source signal into a digital code using a quantization method. The source coded signal is represented by a set of integers {0, 1, 2, ..., N-1}, where N is finite. Source decoding recovers the original information signal sequence using the source coded signal. This toolbox includes two source coding quantization methods: scalar quantization and predictive quantization. A third source coding method, vector quantization, is not included in this toolbox. Scalar Quantization Scalar quantization is a process that assigns a single value to inputs that are within a specified range. Inputs that fall in a different range of values are assigned a different single value. An analog signal is in effect digitized by 3-13 3 Tutorial scalar quantization. For example, a sine wave, when quantized, will look like a rising and falling stair step: Quantized sine wave 1.5 1 0.5 0 Amplitude −0.5 −1 −1.5 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time (sec) Scalar quantization requires the use of a mapping of N contiguous regions of the signal range into N discrete values. The N regions are defined by a partitioning that consists of N-1 distinction partition values within the signal range. -

Orf L- Burl .1 I
WRIT Wr 1/195 : aifistririr 113 Orf l- Burl .1 I. The examination will be conducted by the Union MINISTRY OF PERSONNEL, PUBLIC GRIEVANCES Public Service Commission in the manner prescribed in AND PENSIONS Appendix Ito these rules. (Department of Personnel and Training) The dates on which and the places at which the NOTIFICATION Preliminary and Main Examinations will be held shall be fixed New Delhi, the 4th February, 2012 by the Commission. RULES 2. A candidate shall be required to indicate in his/her F. No. 13018/20/2011-AIS(I).—The rules for a application form for the Main Examination his/her order of competitive examination—Civil Services Examination—to be preferences for various services/posts for which he/she would like to be considered for appointment in case he/she held by the Union Public Service Commission in 2012 for the is recommended for appointment by Union Public Service purpose of filling vacancies in the following services/posts Commission. No change in preference of services once are, with the concurrence of the Ministries concerned and indicated by a candidate would be permitted. the Comptroller and Auditor General of India in respect of the Indian Audit and Accounts Service, published for general A candidate who wishes to be considered for IAS/IPS shall be required to indicate in his/her application form for information :- the Main Examination his/ her order of preferences for various () The Indian Administrative Service. State caders for which he/she would like to be considered for (i) The Indian Foreign Service. allotment in case he/she is appointed to the IAS/1PS. -

Delta Modulation
DELTA MODULATION PREPARATION ...............................................................................122 principle of operation...............................................................122 block diagram.........................................................................................122 step size calculation................................................................................124 slope overload and granularity.................................................124 slope overload ........................................................................................124 granular noise.........................................................................................125 noise and distortion minimization ..........................................................126 EXPERIMENT .................................................................................126 setting up..................................................................................126 slope overload..........................................................................129 the ADAPTIVE CONTROL signal................................................................129 the output .................................................................................130 complex message.....................................................................131 TUTORIAL QUESTIONS................................................................132 APPENDIX.......................................................................................133 a ‘complex’ -

Readingsample
Signals and Communication Technology Digital Communication Principles and System Modelling Bearbeitet von Apurba Das 1. Auflage 2010. Buch. xviii, 246 S. ISBN 978 3 642 12742 7 Format (B x L): 15,5 x 23,5 cm Gewicht: 1220 g Weitere Fachgebiete > Technik > Nachrichten- und Kommunikationstechnik Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. Chapter 2 Waveform Encoding 2.1 Introduction ‘Any natural signal is in analog form’. To respect the said statement and to meet the basic requirement of any type of digital signal processing and digital com- munication, the essential and prior step is converting the electrical form (through transducer) of the natural analog signal into digital form, as digital modulator or any type of digital signal processor does not accept analog signal as its input. Therefore, to consider the digital transmission of analog signal, it is very important to encode the waveform 1st. This process of waveform encoding is done through sampling, quantization and encoding; finally the analog information is converted to digital data. The digitally coded analog signal produces a rugged signal with high immunity to distortion, interference and noise. This source coding also allows the uses of regen- erative repeater for long distance communication. In the process of quantization, the approximation results in quantization noise and with a target of removing the noise, the bandwidth becomes comparable to the analog signal. -

Lossless Image Compression and Decompression Using Huffman Coding
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 02 Issue: 01 | Apr-2015 www.irjet.net p-ISSN: 2395-0072 LOSSLESS IMAGE COMPRESSION AND DECOMPRESSION USING HUFFMAN CODING Anitha. S, Assistant Professor, GAC for women, Tiruchendur,TamilNadu,India. Abstract - This paper propose a novel Image the training set (neighbors), reduce some redundancies. compression based on the Huffman encoding and Context based compression algorithms are used predictive technique [2][3]. decoding technique. Image files contain some redundant and inappropriate information. Image compression 2. HISTORY addresses the problem of reducing the amount of data required to represent an image. Huffman encoding and Morse code, invented in 1838 for use in telegraphy, is an decoding is very easy to implement and it reduce the early example of data compression based on using shorter codeword’s for letters such as "e" and "t" that are more complexity of memory. Major goal of this paper is to common in English. Modern work on data compression provide practical ways of exploring Huffman coding began in the late 1940s with the development of information technique using MATLAB . theory. In 1949 Claude Shannon and Robert Fano devised a systematic way to assign codeword’s based on probabilities Keywords - Image compression, Huffman encoding, Huffman of blocks. An optimal method for doing this was then found decoding, Symbol, Source reduction… by David Huffman in 1951.In 1980’s a joint committee , known as joint photographic experts group (JPEG) 1. INTRODUCTION developed first international compression standard for continuous tone images. JPEG algorithm included several A commonly image contain redundant information i.e. -

DPCM (Differential PCM) 3
Digital Image Processing IMAGE DATA COMPRESSION – PART2 Hamid R. Rabiee Fall 2015 Predictive Techniques 2 Previous methods doesn’t consider correlation between pixels. However, in real word images we always expect some kind of correlation in images. The philosophy underlying predictive techniques is to remove mutual redundancy between successive pixels and encode only the new information DPCM (differential PCM) 3 For each pixel 풖 풏 a quantity 풖 .(풏) an estimate of 풖.(풏) (decoded sample), is predicted from the previously decoded samples Now it is sufficient to code the prediction error: If 풆.(풏) is the quantized value of 풆(풏) then: DPCM CODEC scheme 4 Feedforward Prediction 5 In DPCM the prediction is based on the output rather than the input, so that the quantizer error at a given step is fed back to the quantizer input at the next step. If the prediction rule is based on the past inputs the signal reconstruction error would depend on all the past and present quantization errors in the feedforward prediction-error sequence. Feedback Versus Feedforward 6 Prediction Example Delta Modulation 7 The simplest of the predictive coders uses a one-step delay function as a predictor and a 1-bit quantizer, giving a 1-bit representation of the signal: Other DPCM Variants 8 Line-by-Line DPCM: In this method each scan line of the image is coded independently by the DPCM technique. Two-Dimensional DPCM: Adaptive Techniques for DPCM 9 To improve DPCM performance we can adapt the quantizer or predictor to variations in the local statistics of the image data such as: Adaptive gain control Adaptive classification Adaptive gain control 10 A simple adaptive quantizer updates the variance of the prediction error at each step and adjusts the spacing of the quantizer levels accordingly.