Fasteners, and Couplers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Screw Thread Systems
Machinery's Handbook 27th Edition TABLE OF CONTENTS THREADS AND THREADING SCREW THREAD SYSTEMS METRIC SCREW THREADS 1725 Screw Thread Forms 1783 American Standard Metric Screw 1725 V-Thread, Sharp V-thread Threads M Profile 1725 US Standard Screw Thread 1783 Comparison with Inch Threads 1725 Unified Screw Thread Forms 1783 Interchangeability 1726 International Metric Thread 1783 Definitions 1727 Definitions of Screw Threads 1784 Basic M Profile 1784 M Crest and Root Form UNIFIED SCREW THREADS 1785 General Symbols 1732 American Standard for Unified 1785 M Profile Screw Thread Series Screw Threads 1785 Mechanical Fastener Coarse Pitch 1732 Revised Standard 1786 M Profile Data 1732 Advantages of Unified Threads 1787 Limits and Fits 1732 Thread Form 1793 Dimensional Effect of Coating 1733 Internal and External Screw 1793 Formulas for M Profile Thread Design Profile 1797 Tolerance Grade Comparisons 1733 Thread Series 1797 M Profile Limiting Dimension 1734 Inch Screw Thread 1798 Internal Metric Thread 1735 Diameter-Pitch Combination 1800 External Metric Thread 1736 Standard Series Combinations 1804 American Standard Metric Screw 1763 Coarse-Thread Series Threads MJ Profile 1764 Fine-Thread Series 1804 Diameter-Pitch Combinations 1764 Extra-Fine-Thread Series 1807 Trapezoidal Metric Thread 1765 Constant Pitch Series 1807 Comparison of ISO and DIN 1766 4-Thread Series Standards 1767 6-Thread Series 1813 Trapezoidal Metric Thread 1768 8-Thread Series 1814 ISO Miniature Screw Threads 1769 12-Thread Series 1814 British Standard ISO Metric Screw 1770 16-Thread Series Threads 1771 20-Thread Series 1814 Basic Profile Dimensions 1772 28-Thread Series 1815 Tolerance System 1773 Thread Classes 1815 Fundamental Deviations 1773 Coated 60-deg. -
Thread Systems
PRECISION GAGE SOLUTIONS 390 Oser Avenue, Hauppauge, New York, U.S.A. 11788 Tel: (800) 767-7633 (631) 231-1515 Fax: (800) 767-2034 (631) 231-1625 Email: [email protected] Web: www.threadcheck.com Thread Systems A thread system is a set of various thread designations which represent different thread sizes to define the thread geometry for example: Thread Series Designations Metric M Unified UNC, UNF, UNS, UN, UNR National Taper Pipe NPT Aeronautical Taper Pipe ANPT British Standard Whitworth BSW ***Please see page 53 of our catalog or please visit our website at www.threadcheck.com under the technical documents and click onto the Basic Screw Thread Designations.*** There are only two major screw thread systems that are used today: 1. The ISO Metric Screw Thread System 2. The Unified Screw Thread System In countries other than the United States and Canada, the ISO Metric Screw Thread System is primarily used today. Unlike, most other countries the United States and Canada still use the Unified (Inch) Thread System. However, both are moving over to the ISO Metric System. It is estimated that approximately 60% of screw threads in use in the United States are still inch based. Other thread designations such as BSW, BSF, BA, etc. are also still in use today but are mostly produced in the capacity of a replacement part. Threads are manufactured by cold forming, cold rolling, hot forming, cold rolling or by the cut-thread process. The most common manufacturing method for standard fasteners up to 1” or 25mm is the cold forming or cold rolling process whereby both the head and the thread are produced with the material in the cold state. -
Section R Disponibles Sur Spaenaur.Com Etàlapage TC4 Et TC5 Àlafindece Catalogue
Section R CATALOG 14 CATALOG P: 1-800-265-8772 F: 1-888-252-6380 [email protected] © 2018 Spaenaur Inc. All rights reserved. Catalog may not be reproduced, in whole or in part, without the written permission of Spaenaur Inc. Subject to Catalog Terms and Conditions of Use available at Spaenaur.com and on page TC2 and TC3 at the back of this catalog. © 2018 Spaenaur Inc. Tous droits réservés. Le catalogue ne peut être reproduit, en tout ou en partie, sans l’autorisation écrite de Spaenaur Inc. L’utilisation est soumise aux Conditions d’utilisation du Catalogue disponibles sur Spaenaur.com et à la page TC4 et TC5 à la fin de ce catalogue. Reference & Tableaux de référence Conversion Charts et de conversion Inch & Metric Comparative Chart Inch & Pouce et Tableau comparatif des dimensions Metric R2 métrique impériales et métriques Inch & Metric Conversion Chart Inch & Pouce et Tableau de conversion des dimensions Metric R3 métrique impériales et métriques Fraction/Decimal Equivalents Inch R5 Pouce Équivalences fractions/décimales Inch & Metric Torque Conversion Chart Inch & Pouce et Tableau de conversion des valeurs de Metric R6 métrique serrage impériales et métriques Inch & Metric Tension Loads; Inch & Pouce et Charges de tension; couples de serrage Tightening Torques Metric R7 métrique impériaux et métriques Inch & Metric Thread Size Comparison Chart Inch & Pouce et Tableau de comparaison des diamètres Metric R8 métrique de filets impériales et métriques Inch Pouce Tableau des dimensions Inch Head Dimension Chart R10 des têtes de vis -

Iso 898-1:2009(E)
INTERNATIONAL ISO STANDARD 898-1 Fourth edition 2009-04-01 Mechanical properties of fasteners made of carbon steel and alloy steel — Part 1: Bolts, screws and studs with specified property classes — Coarse thread and fine pitch thread Caractéristiques mécaniques des éléments de fixation en acier au carbone et en acier allié — Partie 1: Vis, goujons et tiges filetées de classes de qualité spécifiées — Filetages à pas gros et filetages à pas fin Reference number ISO 898-1:2009(E) © ISO 2009 ISO 898-1:2009(E) PDF disclaimer This PDF file may contain embedded typefaces. In accordance with Adobe's licensing policy, this file may be printed or viewed but shall not be edited unless the typefaces which are embedded are licensed to and installed on the computer performing the editing. In downloading this file, parties accept therein the responsibility of not infringing Adobe's licensing policy. The ISO Central Secretariat accepts no liability in this area. Adobe is a trademark of Adobe Systems Incorporated. Details of the software products used to create this PDF file can be found in the General Info relative to the file; the PDF-creation parameters were optimized for printing. Every care has been taken to ensure that the file is suitable for use by ISO member bodies. In the unlikely event that a problem relating to it is found, please inform the Central Secretariat at the address given below. COPYRIGHT PROTECTED DOCUMENT © ISO 2009 All rights reserved. Unless otherwise specified, no part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm, without permission in writing from either ISO at the address below or ISO's member body in the country of the requester. -

Makes It Easy to Find Manuals Online!
Air Conditioning Control System Centralized Controller EW-50A/EW-50E Installation and Instructions Manual Contents 1. Safety precautions .......................................................................2 1-1. General precautions ....................................................................................... 2 1-2. Precautions for unit installation ....................................................................... 3 1-3. Precautions for electrical wiring ...................................................................... 3 1-4. Precautions for relocating or repairing the unit ............................................... 4 1-5. Additional precautions .................................................................................... 4 2. Introduction ..................................................................................6 2-1. Part names ..................................................................................................... 6 3. Package contents .........................................................................8 4. Specifications ...............................................................................9 4-1. Product specifications ..................................................................................... 9 4-2. External dimensions ..................................................................................... 10 4-3. Product features ............................................................................................11 5. System configuration ..................................................................14 -

Metric Screw Threads: M Profile
ASME B1.13M-2005 (Revision of ASME B1.13M-2001) Metric Screw Threads: M Profile AN AMERICAN NATIONAL STANDARD Intentionally left blank ASME B1.13M-2005 (Revision of ASME B1.13M-2001) Metric Screw Threads: M Profile AN AMERICAN NATIONAL STANDARD Three Park Avenue • New York, NY 10016 Date of Issuance: March 10, 2006 The next edition of this Standard is scheduled for publication in 2010. There will be no addenda or written interpretations of the requirements of this Standard issued to this edition. ASME is the registered trademark of The American Society of Mechanical Engineers. This code or standard was developed under procedures accredited as meeting the criteria for American National Standards. The Standards Committee that approved the code or standard was balanced to assure that individuals from competent and concerned interests have had an opportunity to participate. The proposed code or standard was made available for public review and comment that provides an opportunity for additional public input from industry, academia, regulatory agencies, and the public-at-large. ASME does not “approve,” “rate,” or “endorse” any item, construction, proprietary device, or activity. ASME does not take any position with respect to the validity of any patent rights asserted in connection with any items mentioned in this document, and does not undertake to insure anyone utilizing a standard against liability for infringement of any applicable letters patent, nor assumes any such liability. Users of a code or standard are expressly advised that determination of the validity of any such patent rights, and the risk of infringement of such rights, is entirely their own responsibility. -

Iso 898-1:2009(E)
This preview is downloaded from www.sis.se. Buy the entire standard via https://www.sis.se/std-910885 INTERNATIONAL ISO STANDARD 898-1 Fourth edition 2009-04-01 Mechanical properties of fasteners made of carbon steel and alloy steel — Part 1: Bolts, screws and studs with specified property classes — Coarse thread and fine pitch thread Caractéristiques mécaniques des éléments de fixation en acier au carbone et en acier allié — Partie 1: Vis, goujons et tiges filetées de classes de qualité spécifiées — Filetages à pas gros et filetages à pas fin Reference number ISO 898-1:2009(E) © ISO 2009 This preview is downloaded from www.sis.se. Buy the entire standard via https://www.sis.se/std-910885 ISO 898-1:2009(E) PDF disclaimer This PDF file may contain embedded typefaces. In accordance with Adobe's licensing policy, this file may be printed or viewed but shall not be edited unless the typefaces which are embedded are licensed to and installed on the computer performing the editing. In downloading this file, parties accept therein the responsibility of not infringing Adobe's licensing policy. The ISO Central Secretariat accepts no liability in this area. Adobe is a trademark of Adobe Systems Incorporated. Details of the software products used to create this PDF file can be found in the General Info relative to the file; the PDF-creation parameters were optimized for printing. Every care has been taken to ensure that the file is suitable for use by ISO member bodies. In the unlikely event that a problem relating to it is found, please inform the Central Secretariat at the address given below. -

Technical Data
HI·TECH (800) 677-8942 I (303) 680-5159 www.hitechcontrols.con CONTROLS, INC. Click or Call for a Quotel • "Hybrid" Torque Specifications S rint/BSP and Pro-Fit/NPTF --l ......."' 'Hybrid' Torque Specifications - (Sprint - BSP Fittings assembled into female NPTF ports) <au lion: Mating material and female parls may be too soft for high torque values. {heck material hardness to ovoid Slripping, galling or (foss-threading. This table is ONLY a guide for "hybrid" siluatiom; that require inteHhonging thread Iypes to ouommodote tubing requirements. T1wilOO Size MiWn.m ToltpJel'l:U AW:itun IClqJe VWe Sprint N. fl-l.lI$ N. h-lbs 1/8" • 10 0.1 10.0 1.' 1/4" • 4.0 1.9 20.0 14,8 3/8" 27.0 10.0 54.0 40.0 1/2" 27.0 100 67.0 ~O • Hrllll! TOIq1N "loti III rlMll Tbllocf ~III QlIIIlVIll Illhl lorqilt WIlIII for (1lOIIa~OlII1l ~ (ISP Inale II ISP ftlnale). ·Hybrid" TOfque SpecificationS - (Profit - NPTF Fittings assembled into female BSP portS) (llulilln: Mating malelial and female parIs may be too soh for high la/que values. {heck material hardness ra avaid stripping, galling ar Closs·rhleading. This rable is ONLY a guide for "hybrid" silualians lhat require intmhonging rhreod Iypes 10 ouommadare tubing requilemenrs. ihleod Size Miifun ltll~ VIM Moxirun 'onp VtU Sprint N. fl-lbs N. fl-Lbs 1/8" • 0.1 10.0 - I' 1.' w 1/4 • 4.' 1.9 20.0 14.8 3/8" • I.' 3.1 20.0 14.8 1/2" 21.0 20.0 54,0 40.0 c< lit " ,tI,,,,, ," "Il' " .." ....1, ..1 I, ......" ."l.., "",, 179 "MOnO at "j"" ,. -
Aerospace Product Assurance Standards/Specifications Matrix 1
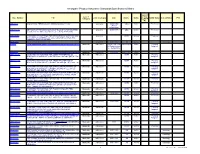
Aerospace Product Assurance Standards/Specifications Matrix Applicati Level 3 on Notes Doc. Number Title Level 4 Category Date Source Status NASA Status General Notes POC Category (LL/BP/A N) ANSI-S1.1 ACOUSTICAL TERMINOLOGY (SEE ALSO ASA-111-94) Acoustics 01/04/1994 ASA Active Preferred (Errata 01/04/1994) ANSI-S12.23 METHOD FOR THE DESIGNATION OF SOUND POWER EMITTED Acoustics 08/08/1996 ASA Active Preferred BY MACHINERY AND EQUIPMENT (SEE ALSO ASA-83-89) ASTM-E477 STANDARD TEST METHOD FOR MEASURING ACOUSTICAL AND Acoustics ASTM Active Preferred AIRFLOW PERFORMANCE OF DUCT LINER MATERIALS AND PREFABRICATED SILENCERS JIS-T-1201 DIAGNOSTIC AUDIOMETERS Acoustics 01/01/1982 JIS Active Hardcopy A-A-113 TAPE, PRESSURE-SENSITIVE ADHESIVE (SUPERSEDING A-A-113C) Materials Adhesives 12/04/1996 (Not. DIDS/CIDS Active Pending Of Reinstatement Adoption 2 - 05/02/2000) A-A-59485 PLASTIC MATERIAL, PRESSURE SENSITIVE ADHESIVE, FOR AEROSPACEMaterials IDENTIFICATIONAdhesives AND MARKING2/24/2000 (SUPERSEDINGDIDS/CIDS MIL-P-38477A)Active ASTM-D2293 STANDARD TEST METHOD FOR CREEP PROPERTIES OF Materials Adhesives ASTM Active Pending ADHESIVES IN SHEAR BY COMPRESSION LOADING (METAL-TO- Adoption METAL) ASTM-D2294 STANDARD TEST METHOD FOR CREEP PROPERTIES OF Materials Adhesives ASTM Active Pending ADHESIVES IN SHEAR BY TENSION LOADING (METAL-TO-METAL) Adoption ASTM-D2295 STANDARD TEST METHOD FOR STRENGTH PROPERTIES OF Materials Adhesives ASTM Active Pending ADHESIVES IN SHEAR BY TENSION LOADING AT ELEVATED Adoption TEMPERATURES (METAL-TO-METAL) ASTM-D2557 -

Iso 898-1:2013(E)
INTERNATIONAL ISO STANDARD 898-1 Fifth edition 2013-01-15 Mechanical properties of fasteners made of carbon steel and alloy steel Part 1: Bolts, screws and studs with specified property classes — Coarse thread and fine pitch thread Caractéristiques mécaniques des éléments de fixation en acier au carbone et en acier allié Partie 1: Vis, goujons et tiges filetées de classes de qualité spécifiées — Filetages à pas gros et filetages à pas fin Reference number ISO 898-1:2013(E) © ISO 2013 ISO 898-1:2013(E) COPYRIGHT PROTECTED DOCUMENT © ISO 2013 All rights reserved. Unless otherwise specified, no part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm, without permission in writing from either ISO at the address below or ISO's member body in the country of the requester. ISO copyright office Case postale 56 • CH-1211 Geneva 20 Tel. + 41 22 749 01 11 Fax + 41 22 749 09 47 E-mail [email protected] Web www.iso.org Published in Switzerland ii © ISO 2013 – All rights reserved ISO 898-1:2013(E) Contents Page Foreword ............................................................................................................................................................iv 1 Scope ......................................................................................................................................................1 2 Normative references............................................................................................................................2 -

Mechanical Properties of Steel Fasteners – Bolts, Screws and Studs
TECHNICAL INFORMATION Contents Page Contents................................................................................................................................................15-0-1 & 2 Foreword..............................................................................................................................................15-1-1 Mechanical properties of steel fasteners – bolts, screws and studs ....................................................................................................................... 15- 5- 1 – bolts and screws M 1 to M 10 (breaking torques) .............................................................................. 15- 5- 2 – nuts - general explanation .......................................................................................................................... 15- 5- 3 - “DIN” nuts ......................................................................................................................................... 15- 5- 4 - “ISO” nuts with metric (ISO) screw thread with coarse pitch ............................................................ 15- 5- 5 - “ISO” nuts with metric (ISO) screw thread with fine pitch ................................................................. 15- 5- 6 & 7 - nuts classified according to hardness ............................................................................................... 15- 5- 8 Material properties of steel fasteners – steels .................................................................................................................................................. -

Transient Thermal Tensile Behaviour of Novel Pitch-Based Ultra-High Modulus CFRP Tendons
polymers Article Transient Thermal Tensile Behaviour of Novel Pitch-Based Ultra-High Modulus CFRP Tendons Giovanni Pietro Terrasi 1,2,*, Emma R. E. McIntyre 2, Luke A. Bisby 2, Tobias D. Lämmlein 1 and Pietro Lura 3,4 1 Mechanical Systems Engineering Laboratory, Empa, Swiss Federal Laboratories for Materials Science and Technology, Überlandstrasse 129, CH-8600 Dübendorf, Switzerland; [email protected] 2 BRE Centre for Fire Safety Engineering, Institute for Infrastructure & Environment, School of Engineering, University of Edinburgh, The King’s Buildings Edinburgh, EH93JL Scotland, UK; [email protected] (E.R.E.M.); [email protected] (L.A.B.) 3 Concrete and Construction Chemistry Laboratory, Empa, Swiss Federal Laboratories for Materials Science and Technology, Überlandstrasse 129, CH-8600 Dübendorf, Switzerland; [email protected] 4 Institute for Building Materials (IfB), ETH Zurich, 8092 Zurich, Switzerland * Correspondence: [email protected]; Tel.: +41-587-654-117; Fax: +41-587-656-911 Academic Editors: Alper Ilki and Masoud Motavalli Received: 24 October 2016; Accepted: 6 December 2016; Published: 21 December 2016 Abstract: A novel ultra-high modulus carbon fibre reinforced polymer (CFRP) prestressing tendon made from coal tar pitch-based carbon fibres was characterized in terms of high temperature tensile strength (up to 570 ◦C) with a series of transient thermal and steady state temperature tensile tests. Digital image correlation was used to capture the high temperature strain development during thermal and mechanical loading. Complementary thermogravimetric (TGA) and dynamic mechanical thermal (DMTA) experiments were performed on the tendons to elucidate their high temperature thermal and mechanical behaviour.