MIDI Controlled Digital Audio Synthesizer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Touchpoint: Dynamically Re-Routable Effects Processing As a Multi-Touch Tablet Instrument
Proceedings ICMC|SMC|2014 14-20 September 2014, Athens, Greece Touchpoint: Dynamically Re-Routable Effects Processing as a Multi-Touch Tablet Instrument Nicholas K. Suda Owen S. Vallis, Ph.D California Institute of the Arts California Institute of the Arts 24700 McBean Pkwy. 24700 McBean Pkwy. Valencia, California 91355 Valencia, California 91355 United States United States [email protected] [email protected] ABSTRACT Touchpoint is a multi-touch tablet instrument which pre- sents the chaining-together of non-linear effects processors as its core music synthesis technique. In doing so, it uti- lizes the on-the-fly re-combination of effects processors as the central mechanic of performance. Effects Processing as Synthesis is justified by the fact that that the order in which non-linear systems are arranged re- sults in a diverse range of different output signals. Be- cause the Effects Processor Instrument is a collection of software, the signal processing ecosystem is virtual. This means that processors can be re-defined, re-configured, cre- Figure 1. The sprawl of peripherals used to control IDM ated, and destroyed instantaneously, as a “note-level” mu- artist Tim Exile’s live performance. sical decision within a performance. The software of Touchpoint consists of three compo- nents. The signal processing component, which is address- In time stretching, pitch correcting, sample replacing, no- ed via Open Sound Control (OSC), runs in Reaktor Core. ise reducing, sound file convolving, and transient flagging The touchscreen component runs in the iOS version of Le- their recordings, studio engineers of every style are reg- mur, and the networking component uses ChucK. -

Resonant Spaces Notes
Andrew McPherson Resonant Spaces for cello and live electronics Performance Notes Overview This piece involves three components: the cello, live electronic processing, and "sequenced" sounds which are predetermined but which render in real time to stay synchronized to the per- former. Each component is notated on a separate staff (or pair of staves) in the score. The cellist needs a bridge contact pickup on his or her instrument. It can be either integrated into the bridge or adhesively attached. A microphone will not work as a substitute, because the live sound plays back over speakers very near to the cello and feedback will inevitably result. The live sound simulates the sound of a resonating string (and, near the end of the piece, ringing bells). This virtual string is driven using audio from the cello. Depending on the fundamental frequency of the string and the note played by the cello, different pitches are produced and played back by speakers placed near the cellist. The sequenced sounds are predetermined, but are synchronized to the cellist by means of a series of cue points in the score. At each cue point, the computer pauses and waits for the press of a footswitch to advance. In some cases, several measures go by without any cue points, and it is up to the cellist to stay synchronized to the sequenced sound. An in-ear monitor with a click track is available in these instances to aid in synchronization. The electronics are designed to be controlled in real-time by the cellist, so no other technician is required in performance. -

User Manual Mellotron V - WELCOME to the MELLOTRON the Company Was Called Mellotronics, and the First Product, the Mellotron Mark 1, Appeared in 1963
USER MANUAL Special Thanks DIRECTION Frédéric BRUN Kévin MOLCARD DEVELOPMENT Pierre-Lin LANEYRIE Benjamin RENARD Marie PAULI Samuel LIMIER Baptiste AUBRY Corentin COMTE Mathieu NOCENTI Simon CONAN Geoffrey GORMOND Florian MARIN Matthieu COUROUBLE Timothée BÉHÉTY Arnaud BARBIER Germain MARZIN Maxime AUDFRAY Yann BURRER Adrien BARDET Kevin ARCAS Pierre PFISTER Alexandre ADAM Loris DE MARCO Raynald DANTIGNY DESIGN Baptiste LE GOFF Morgan PERRIER Shaun ELLWOOD Jonas SELLAMI SOUND DESIGN Victor MORELLO Boele GERKES Ed Ten EYCK Paul SCHILLING SPECIAL THANKS Terry MARDSEN Ben EGGEHORN Jay JANSSEN Paolo NEGRI Andrew CAPON Boele GERKES Jeffrey CECIL Peter TOMLINSON Fernando Manuel Chuck CAPSIS Jose Gerardo RENDON Richard COURTEL RODRIGUES Hans HOLEMA SANTANA JK SWOPES Marco CORREIA Greg COLE Luca LEFÈVRE Dwight DAVIES Gustavo BRAVETTI Ken Flux PIERCE George WARE Tony Flying SQUIRREL Matt PIKE Marc GIJSMAN Mat JONES Ernesto ROMEO Adrien KANTER Jason CHENEVAS-PAULE Neil HESTER MANUAL Fernando M RODRIGUES Vincent LE HEN (editor) Jose RENDON (Author) Minoru KOIKE Holger STEINBRINK Stephan VANKOV Charlotte METAIS Jack VAN © ARTURIA SA – 2019 – All rights reserved. 11 Chemin de la Dhuy 38240 Meylan FRANCE www.arturia.com Information contained in this manual is subject to change without notice and does not represent a commitment on the part of Arturia. The software described in this manual is provided under the terms of a license agreement or non-disclosure agreement. The software license agreement specifies the terms and conditions for its lawful use. No part of this manual may be reproduced or transmitted in any form or by any purpose other than purchaser’s personal use, without the express written permission of ARTURIA S.A. -

USB MIDI CONTROLLER INTRODUCTION This Is an Ultra-Compact MIDI Controller Which Serves to Control Music Software
USB MIDI CONTROLLER INTRODUCTION This is an ultra-compact MIDI controller which serves to control music software. It is equipped with 25/49/61 velocity-sensitive keys as well as 1 fader and 4 rotary controls. The controller connects both PC and Mac(OTG convertor cable is required for connecting to Mobile phone and Pad). You can do without a bulky power adapter as power supply is via the USB bus. It’s also available to download the full user manual and other setting instructions from http://en.worlde.com.cn/. 2 STEPS FOR KS TO WORK 1) Connect your KS to the computer by USB cable. 2) Open your DAW in your computer and select KS as your hardware controller in your DAW. Now you are ready to go. CONNECTING A COMPUTER Use the included USB cable to connect the USB MIDI controller to a USB2.0 port on your computer. The power will turn on. Select the KS as MIDI controller within your music software and you are ready to go. DEVICE SETUP IN SOFTWARE To select KS as a controller for your digital audio workstation (DAW): 1. Connect KS to your computer using a standard USB cable. (If you are connecting KS to a USB hub, make sure it is a powered hub. If another device with USB3.0 is connected to USB hub at the same time, KS will not work properly at this time.) 2. Open your DAW. 3. Open your DAW's Preferences, Options, or Device Setup, select KS as your hardware controller, and then close t hat window. -

USB MIDI CONTROLLER INTRODUCTION This Is an Ultra-Compact and Light-Weight MIDI Controller Which Serves to Control Music Software
USB MIDI CONTROLLER INTRODUCTION This is an ultra-compact and light-weight MIDI controller which serves to control music software. It is equipped with 25 velocity-sensitive keys, and 8 velocity-sensitive drum pads as well as 4 faders and 4 rotary controls. The controller connects both PC and Mac(OTG convertor cable is required for connecting to Mobile phone and Pad). You can do without a bulky power adapter as power supply is via the USB bus. The unit is supplied with a software editor which you can download from WORLDE website. The software editor will let you customize this USB MIDI controller to your own requirements. It’s also available to download the full user manual and other setting instructions from http://en.worlde.com.cn/. 3 STEPS FOR PANDAMINI TO WORK 1) Connect your PANDAMINI to the computer by USB cable. 2) Download the software editor from the download page of WORLDE website and customize all editable controllers, and create, save and load presets. 3) Open your DAW in your computer and select PANDAMINI as your hardware controller in your DAW. Now you are ready to go. CONNECTING A COMPUTER Use the included USB cable to connect the USB MIDI controller to a USB2.0 port on your computer. The power will turn on and the scene LED will light up. Select the PANDAMINI as MIDI controller within your music software and you are ready to go. FIRST STEPS WITH THE EDITOR The editor will let you customize all editable controllers, and create, save and load presets. -
Serial Communication Buses
Computer Architecture 10 Serial Communication Buses Made wi th OpenOffi ce.org 1 Serial Communication SendingSending datadata oneone bitbit atat oneone time,time, sequentiallysequentially SerialSerial vsvs parallelparallel communicationcommunication cable cost (or PCB space), synchronization, distance ! speed ? ImprovedImproved serialserial communicationcommunication technologytechnology allowsallows forfor transfertransfer atat higherhigher speedsspeeds andand isis dominatingdominating thethe modernmodern digitaldigital technology:technology: RS232, RS-485, I2C, SPI, 1-Wire, USB, FireWire, Ethernet, Fibre Channel, MIDI, Serial Attached SCSI, Serial ATA, PCI Express, etc. Made wi th OpenOffi ce.org 2 RS232, EIA232 TheThe ElectronicElectronic IndustriesIndustries AllianceAlliance (EIA)(EIA) standardstandard RS-232-CRS-232-C (1969)(1969) definition of physical layer (electrical signal characteristics: voltage levels, signaling rate, timing, short-circuit behavior, cable length, etc.) 25 or (more often) 9-pin connector serial transmission (bit-by-bit) asynchronous operation (no clock signal) truly bi-directional transfer (full-duplex) only limited power can be supplied to another device numerous handshake lines (seldom used) many protocols use RS232 (e.g. Modbus) Made wi th OpenOffi ce.org 3 Voltage Levels RS-232RS-232 standardstandard convertconvert TTL/CMOS-levelTTL/CMOS-level signalssignals intointo bipolarbipolar voltagevoltage levelslevels toto improveimprove noisenoise immunityimmunity andand supportsupport longlong cablecable lengthslengths TTL/CMOS → RS232: 0V = logic zero → +3V…+12V (SPACE) +5V (+3.3V) = logic one → −3V…−12V (MARK) Some equipment ignores the negative level and accepts a zero voltage level as the "OFF" state The "dead area" between +3V and -3V may vary, many receivers are sensitive to differentials of 1V or less Made wi th OpenOffi ce.org 4 Data frame CompleteComplete one-byteone-byte frameframe consistsconsists of:of: start-bit (SPACE), data bits (7, 8), stop-bits (MARK) e.g. -

A Gumstix-Based MIDI-To-OSC Converter
midOSC: a Gumstix-Based MIDI-to-OSC Converter Sebastien´ Schiesser Institute for Computer Music and Sound Technology Zurich University of the Arts Baslerstrasse 30, 8048 Zurich, Switzerland [email protected] Abstract [14], sent to the remote-controlled devices location and con- A MIDI-to-OSC converter is implemented on a commer- verted back to MIDI. Until now, this has been done at each cially available embedded linux system, tighly integrated conversion point through a Max/MSP patch running on a with a microcontroller. A layered method is developed which computer connected to a MIDI interface. This is very de- permits the conversion of serial data such as MIDI to OSC manding in terms of hardware: in the backstage system of formatted network packets with an overall system latency the mAe, a computer is dedicated to conversion purposes below 5 milliseconds for common MIDI messages. only. And when MIDI devices are present on stage, an ad- The Gumstix embedded computer provide an interest- ditional laptop with interface is required. ing and modular platform for the development of such an The mAe is intended to be modular and to support several embedded applications. The project shows great potential “I/O hubs”, where audio and control data are collected and to evolve into a generic sensors-to-OSC ethernet converter dispatched. In order to avoid dependence on a converting which should be very useful for artistic purposes and could computer at each hub, it seemed appropriate to use a dedi- be used as a fast prototyping interface for gesture acquisition cated converter which can run independently, be stacked in devices. -

Introduction to Serial Communication
Technical Tutorial Introduction to Serial Communication Introduction to Serial Communication Technical Tutorial 2002 – 12 - 06 Technical Tutorial Introduction to Serial Communication Table of Contents 1: Introduction 1.1. DCE and DTE Devices 1.2. Synchronous data transfer 1.3. Asynchronous data transfer 2: RS232 2.1. RS232 on DB9 (9-pin D-type connector) 2.2. RS232 on DB25 (25-pin D-type connector) 2.3. RS232 on RJ-45 2.4. Signal Description 2.5. Limitations of RS232 3: RS422 and RS485 3.1. RS422 Serial Communication 3.2. RS485 Serial Communication 3.3. Converters 4: Summary Table 5: Serial Interface of Sena Products 5.1. HelloDevice Lite series 5.2. HelloDevice Pro series 5.3. HelloDevice Super series 5.4. IALink100 Series 5.5. VTS Series 2 Technical Tutorial Introduction to Serial Communication 1. Introduction The purpose of this application note is to attempt to describe the main elements in Serial Communication. This application note attempts to cover enough technical details of RS232, RS422 and RS485. 1.1. DCE and DTE Devices DTE stands for Data Terminal Equipment, and DCE stands for Data Communications Equipment. These terms are used to indicate the pin-out for the connectors on a device and the direction of the signals on the pins. Your computer is a DTE device, while most other devices such as modem and other serial devices are usually DCE devices. RS-232 has been around as a standard for decades as an electrical interface between Data Terminal Equipment (DTE) and Data Circuit-Terminating Equipment (DCE) such as modems or DSUs. -

An Arduino-Based MIDI Controller for Detecting Minimal Movements in Severely Disabled Children
IT 16054 Examensarbete 15 hp Juni 2016 An Arduino-based MIDI Controller for Detecting Minimal Movements in Severely Disabled Children Mattias Linder Institutionen för informationsteknologi Department of Information Technology Abstract An Arduino-based MIDI Controller for Detecting Minimal Movements in Severely Disabled Children Mattias Linder Teknisk- naturvetenskaplig fakultet UTH-enheten In therapy, music has played an important role for children with physical and cognitive impairments. Due to the nature of different impairments, many traditional Besöksadress: instruments can be very hard to play. This thesis describes the development of a Ångströmlaboratoriet Lägerhyddsvägen 1 product in which electrical sensors can be used as a way of creating sound. These Hus 4, Plan 0 sensors can be used to create specially crafted controllers and thus making it possible for children with different impairments to create music or sound. This Postadress: thesis examines if it is possible to create such a device with the help of an Arduino Box 536 751 21 Uppsala micro controller, a smart phone and a computer. The end result is a product that can use several sensors simultaneously to either generate notes, change the Telefon: volume of a note or controlling the pitch of a note. There are three inputs for 018 – 471 30 03 specially crafted sensors and three static potentiometers which can also be used as Telefax: specially crafted sensors. The sensor inputs for the device are mini tele (2.5mm) 018 – 471 30 00 and any sensor can be used as long as it can be equipped with this connector. The product is used together with a smartphone application to upload different settings Hemsida: and a computer with a music work station which interprets the device as a MIDI http://www.teknat.uu.se/student synthesizer. -

Lab 5: Serial Communication (Sci/Spi) and C Objectives Required Materials Introduction
University of Florida EEL 3744 –Spring 2018 Dr. Eric M. Schwartz Electrical & Computer Engineering Dept. 28-Mar-18 Page 1/8 Revision 7 LAB 5: SERIAL COMMUNICATION (SCI/SPI) AND C OBJECTIVES As discovered in Homework 4, the asynchronous UART • Understand the basic operation and structure of protocol utilizes a transfer rate (denoted as the baud rate), as asynchronous and synchronous serial communication, well as two physical connections for each device to i.e., SCI (UART) and SPI. communicate data, i.e., a pin for Receiving data (Rx), and a pin • Utilize C programming constructs to create functions to for Transmitting data (Tx). The only way that this protocol interact with the XMEGA’s USART and SPI systems. functions correctly is if both devices agree on a common baud • Learn how to use SPI communication to interact with an rate. external IMU sensor package. • Stream and plot real-time 3D (XYZ) acceleration data SPI, on the other hand, utilizes a shared clock signal connected using the XMEGA’s USART system and Atmel Studio’s between (at least) two devices (usually denoted as SCK), where Data Visualizer. only one device is known as the “master” device, and where the other devices are “slaves.” Full-duplex communication is REQUIRED MATERIALS possible with SPI (i.e., two devices can talk to each other at the • µPAD v2.0 Development Board same time), although the master always starts any • Robotics Backpack communication between the devices. When the master wants • Digilent/NI Analog Discovery (DAD/NAD) kit to transmit/receive data to/from the slave(s), it generates the • LSM330.h header file synchronized Serial Clock signal (SCK). -

EB215 Local Interconnect Network (LIN)
Freescale Semiconductor EB215 Engineering Bulletin Rev. 1.0, 03/2005 Local Interconnect Network (LIN) Physical Interface Difference Between MC33399 and MC33661 Introduction This engineering bulletin highlights the differences between two Local Interconnect Network (LIN) Physical Interfaces, namely the 33399 and the 33661. The LIN is a serial communication protocol designed to support automotive networks in conjunction with Controller Area Network (CAN). As the lowest level of a hierarchical network, LIN enables cost-effective communication with sensors and actuators when all the features of CAN are not required. The 33399 and the 33661 are physical layer components dedicated to automotive sub-bus applications. They offer speech communication from 1.0 kbps to 20 kbps. There are two main operating modes: Normal and Sleep. For feature information, refer to the device data sheets for 33399 and 33661 © Freescale Semiconductor, Inc., 2005. All rights reserved. Differences Guide Differences Guide This section should be used as a quick guide to determine the main differences between the devices in a similar family. Using Table 1, you can note the differences most relevant to your system/application. This engineering bulletin should be used in conjunction with the most recent specification for each device, to ensure that all differences have been captured. Table 1. Device Differences Parameter 33399 33661 LIN Protocol Specification Addresses LIN 1.3 Applications Addresses LIN 2.0 Applications Terminal Out and Package 8-terminal SOICN. 8-terminal SOICN. One baud rate operation: Two baud rate operations: Baud Rate Operation 1.0 kbps to 20 kbps • 1.0 kbps to 10 kbps • 1.0 kbps to 20 kbps Capable of: Capable of: Controlling an external switchable voltage • Controlling an external switchable voltage INH Output regulator. -
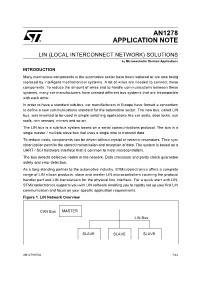
LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications
AN1278 APPLICATION NOTE LIN (LOCAL INTERCONNECT NETWORK) SOLUTIONS by Microcontroller Division Applications INTRODUCTION Many mechanical components in the automotive sector have been replaced or are now being replaced by intelligent mechatronical systems. A lot of wires are needed to connect these components. To reduce the amount of wires and to handle communications between these systems, many car manufacturers have created different bus systems that are incompatible with each other. In order to have a standard sub-bus, car manufacturers in Europe have formed a consortium to define a new communications standard for the automotive sector. The new bus, called LIN bus, was invented to be used in simple switching applications like car seats, door locks, sun roofs, rain sensors, mirrors and so on. The LIN bus is a sub-bus system based on a serial communications protocol. The bus is a single master / multiple slave bus that uses a single wire to transmit data. To reduce costs, components can be driven without crystal or ceramic resonators. Time syn- chronization permits the correct transmission and reception of data. The system is based on a UART / SCI hardware interface that is common to most microcontrollers. The bus detects defective nodes in the network. Data checksum and parity check guarantee safety and error detection. As a long-standing partner to the automotive industry, STMicroelectronics offers a complete range of LIN silicon products: slave and master LIN microcontrollers covering the protocol handler part and LIN transceivers for the physical line interface. For a quick start with LIN, STMicroelectronics supports you with LIN software enabling you to rapidly set up your first LIN communication and focus on your specific application requirements.