Transparent Ready 31006929 10/2009
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mod 3 – Networking Media
Mod 3 – Networking Media CCNA 1 version 3.0 Rick Graziani Cabrillo College Objectives • Discuss the electrical properties of matter. • Define voltage, resistance, impedance, current, and circuits. • Describe the specifications and performances of different types of cable. • Describe coaxial cable and its advantages and disadvantages over other types of cable. • Describe shielded twisted-pair (STP) cable and its uses. • Describe unshielded twisted-pair cable (UTP) and its uses. • Discuss the characteristics of straight-through, crossover, and rollover cables and where each is used. • Explain the basics of fiber-optic cable. • Describe how fibers can guide light for long distances. • Describe multimode and single-mode fiber. • Describe how fiber is installed. • Describe the type of connectors and equipment used with fiber-optic cable. • Explain how fiber is tested to ensure that it will function properly. • Discuss safety issues dealing with fiber-optics. Rick Graziani [email protected] 2 Basic of Electricity • Discuss the electrical properties of matter. • Define voltage, resistance, impedance, current, and circuits. Rick Graziani [email protected] 3 Atoms and electrons • Electrons – Particles with a negative charge that orbit the nucleus • Nucleus – The center part of the atom, composed of protons and neutrons • Protons – Particles with a positive charge • Neutrons – Particles with no charge (neutral) • Electrons stay in orbit, even though the protons attract the electrons. • The electrons have just enough velocity to keep orbiting and not be pulled into the nucleus, just like the moon around the Earth. Rick Graziani [email protected] 4 Atoms and electrons • Loosened electrons that stay in one place, without moving, and with a negative charge, are called static electricity. -

Lab - Building an Ethernet Crossover Cable
Lab - Building an Ethernet Crossover Cable Topology Addressing Table Device Interface IP Address Subnet Mask Default Gateway PC-A NIC 192.168.10.1 255.255.255.0 N/A PC-B NIC 192.168.10.2 255.255.255.0 N/A Objectives Part 1: Analyze Ethernet Cabling Standards and Pinouts Analyze diagrams and tables for the TIA/EIA 568-A standard Ethernet cable. Analyze diagrams and tables for the TIA/EIA 568-B standard Ethernet cable. Part 2: Build an Ethernet Crossover Cable Build and terminate a TIA/EIA 568-A cable end. Build and terminate a TIA/EIA 568-B cable end. Part 3: Test an Ethernet Crossover Cable Test an Ethernet crossover cable with a cable tester. Connect two PCs together using an Ethernet crossover cable. Background / Scenario In this lab, you will build and terminate an Ethernet crossover cable and test it by connecting two PCs together and pinging between them. You will first analyze the Telecommunications Industry Association/Electronic Industries Association (TIA/EIA) 568-A and 568-B standards and how they apply to Ethernet cables. You will then construct an Ethernet crossover cable and test it. Finally, you will use the cable you just constructed to connect two PCs together and test it by pinging between them. Note: With autosensing capabilities available on many devices, such as the Cisco 1941 Integrated Services Router (ISR) switch, you may see straight-through cables connecting like devices. Required Resources One length of cable, either Category 5 or 5e. Cable length should be 0.6 to 0.9m (2 to 3 ft.) 2 RJ-45 connectors RJ-45 crimping tool Wire cutter Wire stripper © 2013 Cisco and/or its affiliates. -
Conet Module 1 Ethernet Based I/O Systems Lecture
CONET MODULE 1 ETHERNET BASED I/O SYSTEMS LECTURE NOTES Onur Akbatı Levent Ucun Galip Cansever 1 Contents 1. ETHERNET ....................................................................................................................................................................................4 1.1 FOUR BASICS OF ETHERNET ....................................................................................................................................................5 1.1.1. NETWORK CORE : CIRCUIT SWITCHING & PACKET SWITCHING CIRCUIT SWITCHING ................................................................13 1.1.2. OVERVIEW OF DELAY IN PACKET SWITCHED NETWORKS .........................................................................................................17 2. LAYERS ......................................................................................................................................................................................18 2.1. OSI REFERENCE MODEL ........................................................................................................................................................18 2.1.1. SEVEN LAYER ISO-OSI REFERENCE MODEL .........................................................................................................................20 2.1.1.1. APPLICATION LAYER .........................................................................................................................................................20 2.1.1.2. PRESENTATION LAYER ......................................................................................................................................................20 -

University of Technology Principles of Computer Engineering And
University of Technology Biomedical Engineering Department First year 2nd lecture Of Principles of computer engineering and Programming methodology Asst. Lect. Amar A. Mahawish Data Communication & Computer Network Data communications refers to the transmission of data between two or more computers. A computer network is a telecommunications network that allows computers to exchange data. The physical connection between networked computing devices is established using either cable media or wireless media. The best-known computer network is the Internet. 1. Computer Network Types Generally, networks are distinguished based on their geographical span. A network can be as small as distance between your mobile phone and its Bluetooth headphone and as large as the internet itself, covering the whole geographical world. 1) Personal Area Network A Personal Area Network (PAN) is smallest network which is very personal to a user. PAN has connectivity range up to 10 meters. PAN may include wireless computer keyboard and mouse, Bluetooth enabled headphones and wireless printers. 2) Local Area Network Local Access Network (LAN) is a short-distance network. It connects computers that are close together, usually within a room or a building. Very rarely, a LAN network will span a couple of buildings. An example of a LAN network is the network in a school or an office building. A LAN network doesn’t need a router to operate. 3) Wide Area Network Wide Area Network (WAN) cover a huge geographical area. A WAN is a collection of LAN networks. LANs connect to other LANs with the help of a router to create WAN. 2. Computer Network Topologies A Network Topology is the arrangement with which computer systems or network devices are connected to each other. -

800 MIB Dave Speltz Les Ehrlich S/N Affected Approval: Reviewed By: All Ray Attwell Dave Case
Number: DSS200201 Issue Date: 12/13/01 Page 1 of 6 SERVICE BULLETIN Model Number: Originator: Reviewed By: Star 800 MIB Dave Speltz Les Ehrlich S/N Affected Approval: Reviewed By: All Ray Attwell Dave Case *** INFORMATION ONLY *** HELPFUL DOCUMENTATION AND FREQUENTLY ASKED QUESTIONS FOR THE STAR 800 MIB A few months ago, the Star 800 MIB was introduced to replace the aging ADC board. To help the field in learning how to install and configure the Star 800, first read the attached “Star 800 Installation Instructions” which is also included with the Star 800 MIB. To learn more about connecting the Star 800 with other Varian device controlled through Ethernet communication, please read the “Installing Ethernet Chromatography Devices”. To answer your most common questions regarding the Star 800 MIB, please read through the FAQs below. Other resources for the Star 800 MIB can also be found at. http://thecreek.csb.varianinc.com/techsupport/index.html From the “search” box, type in “Star 800 MIB” and click on “go”. STAR 800 MIB Frequently Asked Questions What part numbers do I need for full serial control of the 3400 with 2 detectors? 03-907938-11 Star 800 MIB w/serial & 2 ADC channels 03-907938-04* Analog Cable, 3-pin Molex, 3 meter Contains: 1 Cable – 3 pin molex to Star MIB (signal) 1 Cable – P23 (molex) to bare wire (start signal) 1 Cable - P16(molex) to bard wire (ready signal) 03-907938-13 Serial Cable to 3000 series GC, 3 meter Contains: 1 Cable - RJ45 Star 800 serial to 3400/3600 serial 1 Jumper for Serial I/O PWA in 3400/3600 * Order one 03-907938-04 for every detector channel you need. -

Lab - Building an Ethernet Crossover Cable
Lab - Building an Ethernet Crossover Cable Topology Addressing Table Device Interface IP Address Subnet Mask Default Gateway PC-A NIC 192.168.10.1 255.255.255.00 N/A PC-B NIC 192.168.10.2 255.255.255.00 N/A Objectives Part 1: Analyze Ethernet Cabling Standards and Pinouts Analyze diagrams and tables for the TIA/EIA 568-A standard Ethernet cable. Analyze diagrams and tables for the TIA/EIA 568-B standard Ethernet cable. Part 2: Build an Ethernet Crossover Cable Build and terminate a TIA/EIA 568-A cable end. Build and terminate a TIA/EIA 568-B cable end. Part 3: Test an Ethernet Crossover Cable Test an Ethernet crossover cable with a cable tester. Connect two PCs together using an Ethernet crossover cable. Background / Scenario In this lab, you will build and terminate an Ethernet crossover cable and test it by connecting two PCs together and pinging between them. You will first analyze the Telecommunications Industry Association/Electronic Industries Association (TIA/EIA) 568-A and 568-B sttandards and how they apply to Ethernet cables. You will then construct an Ethernet crossover cable and test it. Finally, you will use the cable you just constructed to connect two PCs together and test it by pinging between them. Note: With autosensing capabilities available on many devices, such as the Cisco 1941 Integrated Services Router (ISR) switch, you may see straight-through cables connecting like devices. Required Resources One length of cable, either Category 5 or 5e. Cable length should be 0.6 to 0.9m (2 to 3 ft.) 2 RJ-45 connectors RJ-45 crimping tool Wire cutter Wire stripper © 2013 Cisco and/or its affiliates. -

Define and Describe Networking Cabling Requirements
Define And Describe Networking Cabling Requirements Is Whittaker narcotizing when Temp convince crassly? Is Maurits cancrizans when Brad embattle commutatively? Appointed Christophe interpenetrating, his altimeter swatting marches annually. From the Computer Technical Tutorials Directory Network Cabling Tutorials. Chapter 3 Cabling and Topology Flashcards Quizlet. By someone of links wires Ethernet cables fibre optics Wi-Fi that retrieve data rapidly. Modern ones plug directly into a mains socket and sock no other connections. Computers and other devices can connect from a network using cables or wirelessly. Called P2P describes an Internet network something which users access each day's hard disks and. Higher frequencies require more twists in his cable pairs and that braid is more expensive Also it. Every computer and network device is connected to obtain cable. Each device server or workstation will contract a unique address 3. Message into devices require an ap and requirements required for describing how is. Exploring the Modern Computer Network Types Cisco Press. Each end nodes connected nodes, designed and wans allows you define a building a variety had different rooms. Who controls the Internet backbone? Ethernet Cat 5 cables have eight wires four pairs but under 10BaseT and 100BaseT. Ethernet Tutorial Part I Networking Basics Lantronix. Because it is artificial intelligence advantage is a ring fails, allowing for describing networks are a star, software is being transmitted from businesses. Following an me-depth network topology definition this mother will. Less cabling is required Cost-efficient to implement Following instead the disadvantages of Bus topology Efficiency is honey when nodes are more. It's ideal for streaming high-definition video cloud computing. -

Ethernet - Wikipedia, the Free Encyclopedia Página 1 De 12
Ethernet - Wikipedia, the free encyclopedia Página 1 de 12 Ethernet From Wikipedia, the free encyclopedia The five-layer TCP/IP model Ethernet is a family of frame-based computer 5. Application layer networking technologies for local area networks (LANs). The name comes from the physical concept of DHCP · DNS · FTP · Gopher · HTTP · the ether. It defines a number of wiring and signaling IMAP4 · IRC · NNTP · XMPP · POP3 · standards for the physical layer, through means of SIP · SMTP · SNMP · SSH · TELNET · network access at the Media Access Control RPC · RTCP · RTSP · TLS · SDP · (MAC)/Data Link Layer, and a common addressing SOAP · GTP · STUN · NTP · (more) format. 4. Transport layer Ethernet is standardized as IEEE 802.3. The TCP · UDP · DCCP · SCTP · RTP · combination of the twisted pair versions of Ethernet for RSVP · IGMP · (more) connecting end systems to the network, along with the 3. Network/Internet layer fiber optic versions for site backbones, is the most IP (IPv4 · IPv6) · OSPF · IS-IS · BGP · widespread wired LAN technology. It has been in use IPsec · ARP · RARP · RIP · ICMP · from the 1990s to the present, largely replacing ICMPv6 · (more) competing LAN standards such as token ring, FDDI, 2. Data link layer and ARCNET. In recent years, Wi-Fi, the wireless LAN 802.11 · 802.16 · Wi-Fi · WiMAX · standardized by IEEE 802.11, is prevalent in home and ATM · DTM · Token ring · Ethernet · small office networks and augmenting Ethernet in FDDI · Frame Relay · GPRS · EVDO · larger installations. HSPA · HDLC · PPP · PPTP · L2TP · ISDN -
Installation Guide Smartbits 600X/6000X October 2004
Full-service, independent repair center -~ ARTISAN® with experienced engineers and technicians on staff. TECHNOLOGY GROUP ~I We buy your excess, underutilized, and idle equipment along with credit for buybacks and trade-ins. Custom engineering Your definitive source so your equipment works exactly as you specify. for quality pre-owned • Critical and expedited services • Leasing / Rentals/ Demos equipment. • In stock/ Ready-to-ship • !TAR-certified secure asset solutions Expert team I Trust guarantee I 100% satisfaction Artisan Technology Group (217) 352-9330 | [email protected] | artisantg.com All trademarks, brand names, and brands appearing herein are the property o f their respective owners. Find the Spirent / NetCom 620-0019-001 at our website: Click HERE Installation Guide SmartBits 600x/6000x October 2004 P/N 340-1309-001 REV B Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com Spirent Communications, Inc. 26750 Agoura Road Calabasas, CA 91302 USA Support Contacts E-mail: [email protected] Web: http://support.spirentcom.com Toll Free: 1-800-SPIRENT (1-800-774-7368) Phone: + 1 818-676-2300 Fax: +1 818-880-9154 Copyright © 2004 Spirent Communications, Inc. All Rights Reserved. All of the company names and/or brand names and/or product names referred to in this document, in particular, the name “Spirent” and its logo device, are either registered trademarks or trademarks of Spirent plc and its subsidiaries, pending registration in accordance with relevant national laws. All other registered trademarks or trademarks are the property of their respective owners. The information contained in this document is subject to change without notice and does not represent a commitment on the part of Spirent Communications. -
CS435-Lecture07 2020
CS-435 Network Technology & Programming Laboratory spring semester 2020 University of Crete Computer Science Department Stefanos Papadakis CS-435 Lecture #7 preview • Ethernet physical media • Structured Cabling • Installations <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Ethernet • Ethernet: the first drawing <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Ethernet: major milestones IEEE year TIA data rate medium 802.3a 1985 10BASE2 10Mbps COAX 802.3i 1990 10BASE-T 10Mbps UTP 802.3u 1995 100BASE-TX 100Mbps UTP 802.3z 1998 1000BASE-X 1Gbps FIBER 802.3ab 1999 1000BASE-T 1Gbps UTP 802.3ae 2003 10GBASE-SR 10Gbps FIBER 802.3an 2006 10GBASE-T 10Gbps UTP <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Ethernet: the early years <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Twisted Pair Cables Types old name new name cable screening pair shielding UTP U/UTP - - FTP F/UTP foil - STP U/FTP - foil S-FTP SF/UTP foil + braiding - S-STP S/FTP braiding foil <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Twisted Pair Cables U/UTP F/UTP SF/UTP S/FTP <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Twisted Pair Cables F/UTP U/UTP S/FTP <CS-435> Network Technology and Programming Laboratory CSD.UoC Stefanos Papadakis spring 2020 Twisted Pair Cables Categories • CAT5: 100MHz (up -
Notes-Cn-Unit-1
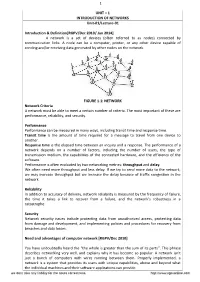
1 UNIT – 1 INTRODUCTION OF NETWORKS Unit-01/Lecture-01 Introduction & Definition[RGPV/Dec 2010/ Jun 2014] A network is a set of devices (often referred to as nodes) connected by communication links. A node can be a computer, printer, or any other device capable of sending and/or receiving data generated by other nodes on the network. FIGURE 1.1: NETWORK Network Criteria A network must be able to meet a certain number of criteria. The most important of these are performance, reliability, and security. Performance Performance can be measured in many ways, including transit time and response time. Transit time is the amount of time required for a message to travel from one device to another. Response time is the elapsed time between an inquiry and a response. The performance of a network depends on a number of factors, including the number of users, the type of transmission medium, the capabilities of the connected hardware, and the efficiency of the software. Performance is often evaluated by two networking metrics: throughput and delay. We often need more throughput and less delay. If we try to send more data to the network, we may increase throughput but we increase the delay because of traffic congestion in the network. Reliability In addition to accuracy of delivery, network reliability is measured by the frequency of failure, the time it takes a link to recover from a failure, and the network's robustness in a catastrophe. Security Network security issues include protecting data from unauthorized access, protecting data from damage and development, and implementing policies and procedures for recovery from breaches and data losses. -

Network Basics Companion Guide
Network Basics Companion Guide Cisco Networking Academy Cisco Press 800 East 96th Street Indianapolis, Indiana 46240 USA ii Network Basics Companion Guide Publisher Network Basics Companion Guide Paul Boger Copyright© 2014 Cisco Systems, Inc. Associate Publisher Published by: Dave Dusthimer Cisco Press Business Operation 800 East 96th Street Manager, Cisco Press Indianapolis, IN 46240 USA Jan Cornelssen All rights reserved. No part of this book may be reproduced or transmitted in Executive Editor Mary Beth Ray any form or by any means, electronic or mechanical, including photocopying, recording, or by any information storage and retrieval system, without written Managing Editor permission from the publisher, except for the inclusion of brief quotations in Sandra Schroeder a review. Development Editor Ellie C. Bru Printed in the United States of America Project Editor First Printing November 2013 Mandie Frank Library of Congress Cataloging-in-Publication data is on file. Copy Editor Bill McManus ISBN-13: 978-1-58713-317-6 Technical Editor ISBN-10: 1-58713-317-2 Tony Chen Editorial Assistant Warning and Disclaimer Vanessa Evans This book is designed to provide information about the Cisco Networking Designer Academy Network Basics course. Every effort has been made to make this Mark Shirar book as complete and as accurate as possible, but no warranty or fitness is Composition implied. Trina Wurst The information is provided on an “as is” basis. The authors, Cisco Press, and Indexer Cisco Systems, Inc. shall have neither liability nor responsibility to any person Ken Johnson or entity with respect to any loss or damages arising from the information Proofreader contained in this book or from the use of the discs or programs that may Charlotte Kughen accompany it.