Machine Learning Applied to Wind and Waves Modelling Aprendizaje
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metocean Design Condition for “Fukushima Forward” Project
Grand Renewable Energy 2014, July27-August 1 O-WdOc-1-4 METOCEAN DESIGN CONDITION FOR “FUKUSHIMA FORWARD” PROJECT Takeshi Ishihara 1, Kenji Shimada 2 and Akihiko Imakita 3 1 The University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, 113-8656 Japan 2 Shimizu Corporation, 3-4-17 Etchujima, Koto-ku, Tokyo, 135-8530 Japan 3 Mitsui Engineering & Shipbuilding, 5-6-4 Tsukiji, Chuo-ku, Tokyo, 104-8439 Japan Metocean condition for the Fukushima FORWARD project is presented. Wind speeds and tsunami are predicted by Monte Carlo simulation and Tsunami simulation, respectively. For wave condition, extreme sea state and normal sea state are evaluated by published data and newly proposed wind-wave and swell combination formula, respectively. Surface current and water level are evaluated by extreme value analyses of hindcast simulation and historical data, respectively. Keywords: floating wind turbine, design conditions, Monte Carlo simulation, extreme value, tsunami INTRODUCTION the extratropical cyclones when estimating extreme wind. Therefore, in this study, 50 year extreme wind speed was For the revitalization in Fukushima prefecture from evaluated by synthesizing probabilities of disasters by the Tohoku region Pacific coast earthquake non-exceedance of two independent processes, i.e. and accident of Fukushima Daiichi nuclear power plant in typhoon FT uand extratropical cyclone FE u by Eq.(1) 2011, Japanese government initiated the world first [1]. Figure 2 shows the synthesis of the probability Floating OffshRe Wind fARm Demonstration project distributions of annual maximum wind speeds by tropical (FORWARD project). In this paper, results of assessment and extratropical cyclone, where probabilities of on metocean conditions for 2MW floating wind turbine and non-exceedance of the annual maximum wind speed was the world first floating substation are presented for wind calculated by Monte Carlo simulation of 10000 years for speed, water level, wave, current and tsunami. -
DE-004 Metocean Engineering and Oceanography Fundamentals
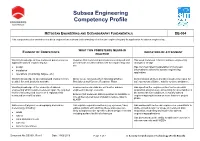
Subsea Engineering Competency Profile METOCEAN ENGINEERING AND OCEANOGRAPHY FUNDAMENTALS DE-004 This competency demonstrates a subsea engineer has a broad understanding of metocean engineering and its application to subsea engineering. WHAT THIS COMPETENCE MEANS IN ELEMENT OF COMPETENCE INDICATORS OF ATTAINMENT PRACTICE Working knowledge of how metocean parameters are Requires that metocean parameters are analysed and Has used metocean criteria in subsea engineering applied in subsea engineering for: presented in a manner which is fit for engineering end analysis or design use ● design Has communicated interpretation of metocean ● installation information to others for subsea engineering application. ● operations (monitoring, fatigue, etc.) Working knowledge of operational and tropical cyclone Ability to use forecasts when following Offshore Demonstrated ability to interpret weather forecasts for weather forecast products available. Procedures and Cyclone Response Plans. safe operations offshore, and for cyclone avoidance. Working knowledge of the elements of subsea Ensures metocean risks are defined for subsea Has specified the requirements of metocean data engineering which require metocean input, the required engineering design elements. acquisition programmes, accounting for uncertainties in levels of accuracy and source be it regional, field the metocean site conditions, to satisfy subsea Ensures that metocean data acquisition is available in measured or modelled data engineering requirements on more than one project time at the required level of detail to reduce risks to phase. ALARP. Awareness of physical oceanography and marine Can explain regional conditions (e.g. cyclones, tides, Has worked with metocean engineers or consultants to meteorology including: eddies, solitons etc) and how these processes are define schedule and / or scope of metocean data likely to impact on site specific subsea design elements acquisition, modelling and studies for subsea ● winds including surface facilities behaviours. -

Appendix E Metocean Report
VOWTAP Research Activities Plan Appendix E – Metocean Report October 2014 DOMINION RESOURCES SERVICES, INC METOCEAN CRITERIA FOR VOWTAP PROJECT OFFSHORE VIRGINIA METOCEAN CRITERIA FOR VIRGINIA OFFSHORE WIND TECHNOLOGY ADVANCEMENT PROJECT (VOWTAP) Report Number: C56462/7907/R3 Issue Date: 28 August 2013 This report is not to be used for contractual or engineering purposes unless described as ‘Final’ in the approval box below Prepared for: Dominion Resources Services, Inc Alternative Energy Solutions 3 Final Manuel Medina Wang Wensu Wang Wensu 28 August 2013 2 Updated Report Manuel Medina Shejun Fan Shejun Fan 09 August 2013 1 Updated Draft Report Manuel Medina Shejun Fan Shejun Fan 31 July 2013 Manuel Medina 0 Draft Report Shejun Fan Shejun Fan 17 July 2013 Jon Molina Rev Description Prepared Checked Approved Date Fugro GEOS/C56462/7907/R3 Page i DOMINION RESOURCES SERVICES, INC METOCEAN CRITERIA FOR VOWTAP PROJECT OFFSHORE VIRGINIA CONTENTS Page 1 INTRODUCTION 1 1.1 Units and Conventions 2 1.2 Abbreviations 2 1.3 Parameter Descriptions 3 2 METOCEAN CRITERIA 4 2.1 Wind Criteria 4 2.1.1 Omni-Directional 1-Year Extreme Wind Values 4 2.1.2 Directional 1-Year Extreme Wind Values 4 2.1.3 1-Year Wind Fitting Parameters 4 2.1.4 Omni-Directional Winter Storm Extreme Wind Values 5 2.1.5 Directional Winter Storm Extreme Wind Values 5 2.1.6 Omni-Directional Winter Storm Extreme Wind Values at Hub Height 6 2.1.7 Directional Winter Storm Extreme Wind Values at Hub Height 7 2.1.8 Wind Fitting Parameters for Winter Storm 8 2.1.9 Omni-Directional Hurricane -

LONG WAVE SURGE Understanding Infragravity Wave Energy in Ports
LONG WAVE SURGE Understanding infragravity wave energy in ports Peter McComb Long period waves and harbour surges § What is the problem? § What is causing it? § What can we do about it? www.metocean.co.nz The problem 6 degrees of freedom www.metocean.co.nzwww.metocean.co.nz Long period waves (LPW) Red = inside harbour Blue = outside harbour Water level oscillations with periods of greater than swell but less than tides. Typically 25 – 1200 seconds with small amplitude. seiche § Bound long waves – tied to the wave group structure but can be released at the coast § Free long waves § Surf beat – long wave energy released in the surf zone FIG IG swell sea long waves www.metocean.co.nz Discovering LPW Infra-gravity 25-120s Total Far Infra-gravity 120-150+s Tide removed Wave group modulation (sets) Sea / Swell removed IG – often modulated by tide FIG – not modulated by tide www.metocean.co.nz Wave groups L h 1 1 2 E p = rgz.dz.dx = rgH Energy flux L òò 16 0 0 1 2 Et = E p + Ek = rgH 1 L h 1 1 8 E = r w2 + u 2 .dz.dx = rgH 2 k ò ò ( ) L 0 -h 2 16 www.metocean.co.nz IG and FIG waves Infra-gravity 25-120s IG Far Infra-gravity 120-150+s FIG 0.1 0.1 0.08 0.09 0.06 0.08 0.04 0.07 FIG waves are created by the modulation of wave energy 0.02 0.06 0 0.05 -0.02 0.04 into ‘sets’, which is beneficial for surfing. -

Vaisala Met-Ocean System Components / for CRITICAL WEATHER CONDITIONS
Vaisala Met-Ocean System Components / FOR CRITICAL WEATHER CONDITIONS WEA-MAR-G-METOCEAN-brochure-B211367EN-B-210x280.indd 1 3.6.2014 13.20 World-Class Vaisala Sensor Technology Vaisala manufactures the widest selection of original meteorological sensors, systems and displays. Ultrasonic wind sensors • Vaisala's unique redundant triangle path technology always ensures turbulent-free measurement • Robust design enables functioning in rough conditions • DNV-approval makes Wind Sensor WMT700 an ideal choice for maritime environments • Body heating available for harsh offshore weather conditions • The FAA relies on Vaisala WINDCAP® technology Benefits ▪ The widest selection of original meteorological sensors and systems based on nearly 80 years of experience ▪ Extensive track record and global presence ▪ Easy upgrade of existing WMS to CAP437 compatible HMS ▪ Industry standard, approved by major oil companies ▪ All sensors are factory Barometric pressure All-in-one weather calibrated or tested and transmitters transmitter delivered with calibration certificate or factory test • Vaisala BAROCAP technology • WXT520 measures wind speed report ensures excellent long-term stability and direction, liquid precipitation, Vaisala systems have interfaces in various atmospheric pressure barometric pressure, temperature ▪ to wide range of sensors from measurements, even in outer space and relative humidity selected partners • Up to three pressure sensors for • Compact and durable with easy ▪ Field proven fully automatic redundancy in critical applications -
Sinclair Island Dock Replacement
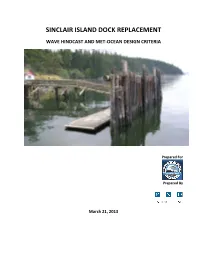
SINCLAIR ISLAND DOCK REPLACEMENT WAVE HINDCAST AND MET-OCEAN DESIGN CRITERIA Prepared For Prepared By March 21, 2013 Sinclair Island Dock Replacement – Met-Ocean Study TABLE OF CONTENTS SECTION Page No. PREFACE TO REPORT ......................................................................................................................... i 1 INTRODUCTION ............................................................................................................................ 1 1.1 Criteria for Wave Conditions in a Small Boat Harbor ............................................................ 1 2 TIDES AND WATER LEVELS ........................................................................................................... 4 3 WIND ............................................................................................................................................ 8 4 WAVE ......................................................................................................................................... 12 4.1 Wave Hindcast Calculations ................................................................................................. 12 4.2 Delft3D-Wave Numerical Model .......................................................................................... 12 5 CURRENTS .................................................................................................................................. 18 6 CONCLUSIONS ........................................................................................................................... -
Metocean Awareness Course an Essential Course Providing a Greater Understanding of Metocean and Its Implications for Offshore Design and Operations
IMarEST and SUT Members Save 20% *see back page for details Image: © CSIRO Metocean Awareness Course An essential course providing a greater understanding of metocean and its implications for offshore design and operations Tuesday 1 – Wednesday 2 June 2021 Parmelia Hilton, 14 Mill Street, Perth 6000 Metocean is a discipline covering WHY WILL THIS meteorology and physical oceanography, COURSE BENEFIT YOU? and is concerned with quantifying the For all offshore industries, the effects of meteorology and impact and effect of weather and sea oceanography (metocean) have a major impact on design and conditions on a wide range of activities in operations. If users of metocean information are not aware of the implications that the weather, waves, currents and water levels can the offshore oil & gas and renewables. have on their operations or design work, then things can go wrong This is an essential course providing a greater with serious health and safety and economic consequences. understanding of Metocean and how the application The Metocean Awareness Course is aimed at those who need to of Metocean information can benefit your organisation have a greater understanding of metocean conditions worldwide particularly with respect to: and how they might impact the effectiveness of their work. u Improved safety The course format will include a mixture of short presentations u Better decision-making and planning presented by expert speakers in this field and interactive workshop u Reduced costs sessions including a group case study exercise. Delegates will receive a comprehensive course manual on attendance. WHO SHOULD ATTEND? For further This course is essential for Project Managers and Engineers in details contact: the offshore and renewables industries, involved in operations or design, from new entrants to the industry to those with Renae Drew many years experience. -
Metocean Data Requirements
Document title 1 Metocean Data Requirements Document title 2 The European Union is a unique economic and political partnership between 28 European countries. In 1957, the signature of the Treaties of Rome marked the will of the six founding countries to create a common economic space. Since then, first the Community and then the European Union has continued to enlarge and welcome new countries as members. The Union has developed into a huge single market with the euro as its common currency. What began as a purely economic union has evolved into an organisation spanning all areas, from development aid to environmental policy. Thanks to the abolition of border controls between EU countries, it is now possible for people to travel freely within most of the EU. It has also become much easier to live and work in another EU country. The five main institutions of the European Union are the European Parliament, the Council of Ministers, the European Commission, the Court of Justice and the Court of Auditors. The European Union is a major player in international cooperation and development aid. It is also the world’s largest humanitarian aid donor. The primary aim of the EU’s own development policy, agreed in November 2000, is the eradication of poverty. The European Commission is the European Community’s executive body. Led by 27 Commissioners, the European Commission initiates proposals of legislation and acts as guardian of the Treaties. The Commission is also a manager and executor of common policies and of international trade relationships. It is responsible for the management of European Union external assistance. -
Intergovernmental Oceanographic Commission Technical Series 143
Intergovernmental Oceanographic Commission Technical Series 143 Capacity Assessment of Tsunami Preparedness in the Indian Ocean Status Report, 2018 UNESCO Intergovernmental Oceanographic Commission Technical Series 143 Capacity Assessment of Tsunami Preparedness in the Indian Ocean Status Report, 2018 By the ICG/IOTWMS Task Team on Capacity Assessment of Tsunami Preparedness UNESCO 2020 IOC Technical Series, 143 Paris, April 2020 English only The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariats of UNESCO and IOC concerning the legal status of any country or territory, or its authorities, or concerning the delimitation of the frontiers of any country or territory. For bibliographic purposes, this document should be cited as follows: UNESCO/IOC. 2020. Capacity Assessment of Tsunami Preparedness in the Indian Ocean –Status Report, 2018. Paris, UNESCO, IOC Technical Series No. 143. National Reports of participating countries are compiled in a supplement to this report. Report prepared by: ICG/IOTWMS Task Team on Capacity Assessment of Tsunami Preparedness Published in 2020 by United Nations Educational, Scientific and Cultural Organization 7, Place de Fontenoy, 75352 Paris 07 SP UNESCO 2020 (IOC/2020/TS/143) IOC Technical Series, 143 page (i) TABLE OF CONTENTS page Acknowledgments .............................................................................................................. (iii) Foreword ............................................................................................................................ -
A Review of Models and Metocean Databases
OGP-IPIECA OSR-JIP REVIEW OF MODELS AND METOCEAN DATABASES Final report OGP-IPIECA REPORT № MOC-0970-01 V1.2 2015/02/23 ACTIMAR - 36, Quai de la Douane – F-29200 Brest - Tél: +33 256 35 56 20 - Fax: +33 298 46 91 04 e-mail: [email protected] - web: http://www.actimar.fr OGP-IPIECA - Review of models and metocean databases Report № MOC-0970-01 - V1.2 – 2015/02/23 REVISIONS Version Date Changes Written by Checked by S. Casitas 0.1 17/10/2014 Outline of the report S. Legac H. Pineau 0.2 04/11/2014 Misc corrections S. Casitas 1.0 23/12/2014 Models evaluation H. Pineau C. Heyraud Corrections after comments. S. Casitas 1.1 13/02/2014 Updated GFS information H. Pineau C. Heyraud Addition of filled questionnaires 1.2 23/02/2014 OGP-IPIECA reference H. Pineau DISTRIBUTION Addressee Company Date of review IPIECA - 1 - OGP-IPIECA - Review of models and metocean databases Report № MOC-0970-01 - V1.2 – 2015/02/23 TABLE OF CONTENTS ACRONYMS ..........................................................................................................................4 EXECUTIVE SUMMARY......................................................................................................11 1 INTRODUCTION...........................................................................................................14 1.1 CONTEXT .................................................................................................................14 1.2 CONTENTS ...............................................................................................................15 -

19009-1-3 Technical Dialogue
TECHNICAL DIALOGUE ON SITE INVESTIGATIONS MetOcean Anders Sørrig Mouritzen, C2Wind, 2019-05-13 Doc. no: 19009-1 Revision: 3 Date: 2019-05-11 Author / QC ASM / CBM 1 • Overall strategy • Categories • MeasureMent Datasets CONTENTS • Wind Resource AssessMent • MeasureMents for WRA • Mesoscale Model for WRA • Site Conditions AssessMent • SCA Wind ParaMeters • SCA Marine ParaMeters • Other SCA ParaMeters Dialogue Questions: Through the presentation, suggestions for dialogue questions will be written in text boxes like this. They are intended to guide the dialogue, but you are of course welcome to not answer them, and to ask any questions of you own. 2 METOCEAN – OVERALL STRATEGY Two Main options will be presented in the following slides: 1. Default Scope (default option) Ø Energinet will provide metocean data and -documentation which is sufficient for the bidders to submit a qualified econoMic bid. Ø This Material shall have uncertainties so sMall that they only have a Minor effect on the bid. FurtherMore, it shall be so extensive that it, for this purpose, either directly provides the bidders with the necessary MetOcean paraMeters, or allow the bidders and their advisors to calculate these paraMeters theMselves. Ø This Material shall be as detailed, and of a quality at least as good, as what is used elsewhere in Northern European offshore wind projects for this purpose. Ø No certification of the Material; only plausibility stateMents from an independent (possibly DS/EN 61400-22 accredited) third party. 2. Comprehensive Scope (only provided if bidders present convincing arguMents for it) Ø In addition to the Default Scope: • The Material provided will either directly state, or be applicable as a basis to calculate, Site Conditions AssessMent (SCA) parameters for MetOcean topics according to the SCA Module of DS/EN 61400-22, and, by reference, IEC 61400-3-1 (2019). -

Coupled High-Resolution Atmosphere Wave Interactions. Evert Wiegant1, Peter Baas1, Remco Verzijlbergh1, Bas Reijmerink2, Sofia Caires2
The new frontier in numerical metocean modelling: PO.146 coupled high-resolution atmosphere wave interactions. Evert Wiegant1, Peter Baas1, Remco Verzijlbergh1, Bas Reijmerink2, Sofia Caires2 1Whiffle Weather Finecasting, 2Deltares Abstract Objectives Numerical modelling of wind and wave parameters are crucial input for design and operation of offshore wind farms. We have developed the world’s first • Show development of a fast coupled LES - spectral wave model coupled atmospheric Large Eddy Simulation (LES) – spectral wave model. This • Explain how coupling is implemented innovative model is capable of capturing wind-wave interaction on the wind farm scale. Influences of bathymetry in the wave field can be observed in the • Illustrate the effects of coupling on wave fields wind field and wind farm wake effects are seen in the wave fields. In a case • Present validation results that show improvements in wave modelling study for a large offshore wind farm, the coupled model shows significant improvements in the wave model results compared to the traditional modelling approach. SWAN: Simulating Waves Near Shore GRASP: GPU-Resident Atmospheric Simulation Platform Model Model State of the art spectral wave model, Whiffle’s operational Large Eddy developed and maintained by TU Delft Simulation (LES) model (Schalkwijk et and Deltares (Cavaleri et al. 2018) al. 2015) Strength Strength Accurately describes diffraction, • GPU based: fast enough for allowing for computation over strong operational forecasting and year- gradients long simulations • Sub 100m resolution: resolves Limitations addressed turbines and turbulence Currently lacks heterogeneous features at high resolution due to coarse wind Figure 2 : Snapshot of a 70m wind field Limitations addressed Figure 1 : Snapshot of the wave field as Currently simple wind-wave interaction input modeled by SWAN.