Spike-Based Bayesian-Hebbian Learning in Cortical and Subcortical Microcircuits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Electromagnetic Field and TGF-Β Enhance the Compensatory
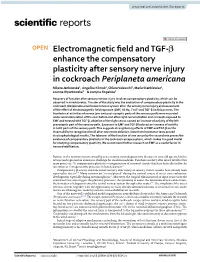
www.nature.com/scientificreports OPEN Electromagnetic feld and TGF‑β enhance the compensatory plasticity after sensory nerve injury in cockroach Periplaneta americana Milena Jankowska1, Angelika Klimek1, Chiara Valsecchi2, Maria Stankiewicz1, Joanna Wyszkowska1* & Justyna Rogalska1 Recovery of function after sensory nerves injury involves compensatory plasticity, which can be observed in invertebrates. The aim of the study was the evaluation of compensatory plasticity in the cockroach (Periplaneta americana) nervous system after the sensory nerve injury and assessment of the efect of electromagnetic feld exposure (EMF, 50 Hz, 7 mT) and TGF‑β on this process. The bioelectrical activities of nerves (pre‑and post‑synaptic parts of the sensory path) were recorded under wind stimulation of the cerci before and after right cercus ablation and in insects exposed to EMF and treated with TGF‑β. Ablation of the right cercus caused an increase of activity of the left presynaptic part of the sensory path. Exposure to EMF and TGF‑β induced an increase of activity in both parts of the sensory path. This suggests strengthening efects of EMF and TGF‑β on the insect ability to recognize stimuli after one cercus ablation. Data from locomotor tests proved electrophysiological results. The takeover of the function of one cercus by the second one proves the existence of compensatory plasticity in the cockroach escape system, which makes it a good model for studying compensatory plasticity. We recommend further research on EMF as a useful factor in neurorehabilitation. Injuries in the nervous system caused by acute trauma, neurodegenerative diseases or even old age are hard to reverse and represent an enormous challenge for modern medicine. -

New Clues for the Cerebellar Mechanisms of Learning
REVIEW Distributed Circuit Plasticity: New Clues for the Cerebellar Mechanisms of Learning Egidio D’Angelo1,2 & Lisa Mapelli1,3 & Claudia Casellato 5 & Jesus A. Garrido1,4 & Niceto Luque 4 & Jessica Monaco2 & Francesca Prestori1 & Alessandra Pedrocchi 5 & Eduardo Ros 4 Abstract The cerebellum is involved in learning and memory it can easily cope with multiple behaviors endowing therefore of sensory motor skills. However, the way this process takes the cerebellum with the properties needed to operate as an place in local microcircuits is still unclear. The initial proposal, effective generalized forward controller. casted into the Motor Learning Theory, suggested that learning had to occur at the parallel fiber–Purkinje cell synapse under Keywords Cerebellum . Distributed plasticity . Long-term supervision of climbing fibers. However, the uniqueness of this synaptic plasticity . LTP . LTD . Learning . Memory mechanism has been questioned, and multiple forms of long- term plasticity have been revealed at various locations in the cerebellar circuit, including synapses and neurons in the gran- Introduction ular layer, molecular layer and deep-cerebellar nuclei. At pres- ent, more than 15 forms of plasticity have been reported. There The cerebellum is involved in the acquisition of procedural mem- has been a long debate on which plasticity is more relevant to ory, and several attempts have been done at linking cerebellar specific aspects of learning, but this question turned out to be learning to the underlying neuronal circuit mechanisms. -

Article Role of Delayed Nonsynaptic Neuronal Plasticity in Long-Term Associative Memory
Current Biology 16, 1269–1279, July 11, 2006 ª2006 Elsevier Ltd All rights reserved DOI 10.1016/j.cub.2006.05.049 Article Role of Delayed Nonsynaptic Neuronal Plasticity in Long-Term Associative Memory Ildiko´ Kemenes,1 Volko A. Straub,1,3 memory, and we describe how this information can be Eugeny S. Nikitin,1 Kevin Staras,1,4 Michael O’Shea,1 translated into modified network and behavioral output. Gyo¨ rgy Kemenes,1,2,* and Paul R. Benjamin1,2,* 1 Sussex Centre for Neuroscience Introduction Department of Biological and Environmental Sciences School of Life Sciences It is now widely accepted that nonsynaptic as well as University of Sussex synaptic plasticity are substrates for long-term memory Falmer, Brighton BN1 9QG [1–4]. Although information is available on how nonsy- United Kingdom naptic plasticity can emerge from cellular processes active during learning [3], far less is understood about how it is translated into persistently modified behavior. Summary There are, for instance, important unanswered ques- tions regarding the timing and persistence of nonsynap- Background: It is now well established that persistent tic plasticity and the relationship between nonsynaptic nonsynaptic neuronal plasticity occurs after learning plasticity and changes in synaptic output. In this paper and, like synaptic plasticity, it can be the substrate for we address these important issues by looking at an long-term memory. What still remains unclear, though, example of learning-induced nonsynaptic plasticity is how nonsynaptic plasticity contributes to the altered (somal depolarization), its onset and persistence, and neural network properties on which memory depends. its effects on synaptically mediated network activation Understanding how nonsynaptic plasticity is translated in an experimentally tractable molluscan model system. -

Modeling Prediction and Pattern Recognition in the Early Visual and Olfactory Systems
Modeling prediction and pattern recognition in the early visual and olfactory systems BERNHARD A. KAPLAN Doctoral Thesis Stockholm, Sweden 2015 TRITA-CSC-A-2015:10 ISSN-1653-5723 KTH School of Computer Science and Communication ISRN KTH/CSC/A-15/10-SE SE-100 44 Stockholm ISBN 978-91-7595-532-2 SWEDEN Akademisk avhandling som med tillstånd av Kungl Tekniska högskolan fram- lägges till offentlig granskning för avläggande av Doctoral Thesis in Computer Science onsdag 27:e maj 2015 klockan 10.00 i F3, Lindstedtsvägen 26, Kungl Tekniska högskolan, Stockholm. © Bernhard A. Kaplan, April 2015 Tryck: Universitetsservice US AB iii Abstract Our senses are our mind’s window to the outside world and deter- mine how we perceive our environment. Sensory systems are complex multi-level systems that have to solve a multitude of tasks that allow us to understand our surroundings. However, questions on various lev- els and scales remain to be answered ranging from low-level neural responses to behavioral functions on the highest level. Modeling can connect different scales and contribute towards tackling these questions by giving insights into perceptual processes and interactions between processing stages. In this thesis, numerical simulations of spiking neural networks are used to deal with two essential functions that sensory systems have to solve: pattern recognition and prediction. The focus of this thesis lies on the question as to how neural network connectivity can be used in order to achieve these crucial functions. The guiding ideas of the models presented here are grounded in the probabilistic interpretation of neural signals, Hebbian learning principles and connectionist ideas. -

Long-Term Plasticity of Intrinsic Excitability
Downloaded from learnmem.cshlp.org on September 27, 2021 - Published by Cold Spring Harbor Laboratory Press Review Long-Term Plasticity of Intrinsic Excitability: Learning Rules and Mechanisms Gae¨l Daoudal and Dominique Debanne1 Institut National de la Sante´Et de la Recherche Me´dicale UMR464 Neurobiologie des Canaux Ioniques, Institut Fe´de´ratif Jean Roche, Faculte´deMe´decine Secteur Nord, Universite´d’Aix-Marseille II, 13916 Marseille, France Spatio-temporal configurations of distributed activity in the brain is thought to contribute to the coding of neuronal information and synaptic contacts between nerve cells could play a central role in the formation of privileged pathways of activity. Synaptic plasticity is not the exclusive mode of regulation of information processing in the brain, and persistent regulations of ionic conductances in some specialized neuronal areas such as the dendrites, the cell body, and the axon could also modulate, in the long-term, the propagation of neuronal information. Persistent changes in intrinsic excitability have been reported in several brain areas in which activity is elevated during a classical conditioning. The role of synaptic activity seems to be a determinant in the induction, but the learning rules and the underlying mechanisms remain to be defined. We discuss here the role of synaptic activity in the induction of intrinsic plasticity in cortical, hippocampal, and cerebellar neurons. Activation of glutamate receptors initiates a long-term modification in neuronal excitability that may represent a parallel, synergistic substrate for learning and memory. Similar to synaptic plasticity, long-lasting intrinsic plasticity appears to be bidirectional and to express a certain level of input or cell specificity. -

Diverse Impact of Acute and Long-Term Extracellular Proteolytic Activity on Plasticity of Neuronal Excitability
REVIEW published: 10 August 2015 doi: 10.3389/fncel.2015.00313 Diverse impact of acute and long-term extracellular proteolytic activity on plasticity of neuronal excitability Tomasz Wójtowicz 1*, Patrycja Brzda, k 2 and Jerzy W. Mozrzymas 1,2 1 Laboratory of Neuroscience, Department of Biophysics, Wroclaw Medical University, Wroclaw, Poland, 2 Department of Animal Physiology, Institute of Experimental Biology, Wroclaw University, Wroclaw, Poland Learning and memory require alteration in number and strength of existing synaptic connections. Extracellular proteolysis within the synapses has been shown to play a pivotal role in synaptic plasticity by determining synapse structure, function, and number. Although synaptic plasticity of excitatory synapses is generally acknowledged to play a crucial role in formation of memory traces, some components of neural plasticity are reflected by nonsynaptic changes. Since information in neural networks is ultimately conveyed with action potentials, scaling of neuronal excitability could significantly enhance or dampen the outcome of dendritic integration, boost neuronal information storage capacity and ultimately learning. However, the underlying mechanism is poorly understood. With this regard, several lines of evidence and our most recent study support a view that activity of extracellular proteases might affect information processing Edited by: Leszek Kaczmarek, in neuronal networks by affecting targets beyond synapses. Here, we review the most Nencki Institute, Poland recent studies addressing the impact of extracellular proteolysis on plasticity of neuronal Reviewed by: excitability and discuss how enzymatic activity may alter input-output/transfer function Ania K. Majewska, University of Rochester, USA of neurons, supporting cognitive processes. Interestingly, extracellular proteolysis may Anna Elzbieta Skrzypiec, alter intrinsic neuronal excitability and excitation/inhibition balance both rapidly (time of University of Exeter, UK minutes to hours) and in long-term window. -

Plasticity in the Olfactory System: Lessons for the Neurobiology of Memory D
REVIEW I Plasticity in the Olfactory System: Lessons for the Neurobiology of Memory D. A. WILSON, A. R. BEST, and R. M. SULLIVAN Department of Zoology University of Oklahoma We are rapidly advancing toward an understanding of the molecular events underlying odor transduction, mechanisms of spatiotemporal central odor processing, and neural correlates of olfactory perception and cognition. A thread running through each of these broad components that define olfaction appears to be their dynamic nature. How odors are processed, at both the behavioral and neural level, is heavily depend- ent on past experience, current environmental context, and internal state. The neural plasticity that allows this dynamic processing is expressed nearly ubiquitously in the olfactory pathway, from olfactory receptor neurons to the higher-order cortex, and includes mechanisms ranging from changes in membrane excitabil- ity to changes in synaptic efficacy to neurogenesis and apoptosis. This review will describe recent findings regarding plasticity in the mammalian olfactory system that are believed to have general relevance for understanding the neurobiology of memory. NEUROSCIENTIST 10(6):513–524, 2004. DOI: 10.1177/1073858404267048 KEY WORDS Olfaction, Plasticity, Memory, Learning, Perception Odor perception is situational, contextual, and ecologi- ory for several reasons. First, the olfactory system is cal. Odors are not stored in memory as unique entities. phylogenetically highly conserved, and memory plays a Rather, they are always interrelated with other sensory critical role in many ecologically significant odor- perceptions . that happen to coincide with them. guided behaviors. Thus, many different animal models, ranging from Drosophila to primates, can be taken —Engen (1991, p 86–87) advantage of to address specific experimental questions. -
Mechanisms of Experience-Dependent Prevention of Plasticity in Visual Circuits
Georgia State University ScholarWorks @ Georgia State University Neuroscience Institute Dissertations Neuroscience Institute Summer 8-12-2014 Mechanisms of Experience-dependent Prevention of Plasticity in Visual Circuits Timothy Balmer Follow this and additional works at: https://scholarworks.gsu.edu/neurosci_diss Recommended Citation Balmer, Timothy, "Mechanisms of Experience-dependent Prevention of Plasticity in Visual Circuits." Dissertation, Georgia State University, 2014. https://scholarworks.gsu.edu/neurosci_diss/13 This Dissertation is brought to you for free and open access by the Neuroscience Institute at ScholarWorks @ Georgia State University. It has been accepted for inclusion in Neuroscience Institute Dissertations by an authorized administrator of ScholarWorks @ Georgia State University. For more information, please contact [email protected]. MECHANISMS OF EXPERIENCE-DEPENDENT PREVENTION OF PLASTICITY IN VISUAL CIRCUITS by TIMOTHY S. BALMER Under the Direction of Sarah L. Pallas ABSTRACT Development of brain function is instructed by both genetically-determined processes (nature) and environmental stimuli (nurture). The relative importance of nature and nurture is a major question in developmental neurobiology. In this dissertation, I investigated the role of visual experience in the development and plasticity of the visual pathway. Each neuron that receives visual input responds to a specific area of the visual field- their receptive field (RF). Developmental refinement reduces RF size and underlies visual acuity, which is important for survival. By rearing Syrian hamsters ( Mesocricetus auratus ) in constant darkness (dark rearing, DR) from birth, I investigated the role of visual experience in RF refinement and plasticity. Previous work in this lab has shown that developmental refinement of RFs occurs in the absence of visual experience in the superior colliculus (SC), but that RFs unrefine and thus enlarge in adulthood during chronic DR. -
Constructive Role of Plasticity Rules in Reservoir Computing
Constructive role of plasticity rules in reservoir computing Guillermo Gabriel Barrios Morales Master’s Thesis Master’s degree in Physics of Complex Systems at the UNIVERSITAT DE LES ILLES BALEARS Academic year 2018-2019 Date: 13/09/2019 UIB Master’s Thesis Supervisors: Miguel C. Soriano and Claudio R. Mirasso “Our treasure lies in the beehives of our knowledge. We are perpetually on our way thither, being by nature winged insects and honey gatherers of the mind. The only thing that lies close to our heart is the desire to bring something home to the hive.” — Friedrich Nietzsche Constructive role of plasticity rules in reservoir computing G. Barrios Morales ABSTRACT Over the last 15 years, Reservoir Computing (RC) has emerged as an appealing ap- proach in Machine Learning, combining the high computational capabilities of Recur- rent Neural Networks with a fast and easy training. By mapping the inputs into a high-dimensional space of non-linear neurons, this class of algorithms have shown their utility in a wide range of tasks from speech recognition to time series prediction. With their popularity on the rise, new works have pointed to the possibility of RC as an ex- isting learning paradigm within the actual brain. Likewise, successful implementation of biologically based plasticity rules into RC artificial networks has boosted the perfor- mance of the original models. Within these nature-inspired approaches, most research lines focus on improving the performance achieved by previous works on prediction or classification tasks. In this thesis however, we will address the problem from a different perspective: instead on focusing on the results of the improved models, we will analyze the role of plasticity rules on the changes that lead to a better performance. -

Integrated Plasticity at Inhibitory and Excitatory Synapses in the Cerebellar Circuit
REVIEW published: 05 May 2015 doi: 10.3389/fncel.2015.00169 Integrated plasticity at inhibitory and excitatory synapses in the cerebellar circuit Lisa Mapelli 1,2†, Martina Pagani 1,3†, Jesus A. Garrido 4,5 and Egidio D’Angelo 1,4* 1 Department of Brain and Behavioral Sciences, University of Pavia, Pavia, Italy, 2 Museo Storico Della Fisica e Centro Studi e Ricerche Enrico Fermi, Rome, Italy, 3 Institute of Pharmacology and Toxicology, University of Zurich, Zurich, Switzerland, 4 Brain Connectivity Center, C. Mondino National Neurological Institute, Pavia, Italy, 5 Department of Computer Architecture and Technology, University of Granada, Granada, Spain The way long-term potentiation (LTP) and depression (LTD) are integrated within the different synapses of brain neuronal circuits is poorly understood. In order to progress beyond the identification of specific molecular mechanisms, a system in which multiple forms of plasticity can be correlated with large-scale neural processing is required. In this paper we take as an example the cerebellar network, in which extensive investigations have revealed LTP and LTD at several excitatory and inhibitory synapses. Cerebellar LTP and LTD occur in all three main cerebellar subcircuits (granular layer, molecular layer, deep cerebellar nuclei) and correspondingly regulate the function of their three main neurons: granule cells (GrCs), Purkinje cells (PCs) and deep cerebellar nuclear (DCN) Edited by: cells. All these neurons, in addition to be excited, are reached by feed-forward and feed- Andrea Barberis, back inhibitory connections, in which LTP and LTD may either operate synergistically Fondazione Istituto Italiano di Tecnologia, Italy or homeostatically in order to control information flow through the circuit. -
Fast Hebbian Plasticity Explains Working Memory and Neural Binding
bioRxiv preprint doi: https://doi.org/10.1101/334821; this version posted May 30, 2018. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY 4.0 International license. Fast Hebbian Plasticity explains Working Memory and Neural Binding Florian Fiebig1, Pawel Herman1, and Anders Lansner1,2 1 Lansner Laboratory, Department of Computational Science and Technology, Royal Institute of Technology, 10044 Stockholm, Sweden, 2 Department of Mathematics, Stockholm University, 10691 Stockholm, Sweden Abstract We have extended a previous spiking neural network model of prefrontal cortex with fast Hebbian plasticity to also include interactions between short-term and long-term memory stores. We investigated how prefrontal cortex could bind and maintain multi-modal long-term memory representations by simulating three cortical patches in macaque brain, i.e. in prefrontal cortex together with visual and auditory temporal cortex. Our simulation results demonstrate how simultaneous brief multi-modal activation of items in long- term memory could build a temporary joint cell assembly linked via prefrontal cortex. The latter can then activate spontaneously and thereby reactivate the associated long-term representations. Cueing one long-term memory item rapidly pattern completes the associated un-cued item via prefrontal cortex. The short-term memory network flexibly updates as new stimuli arrive thereby gradually over- writing older representation. In a wider context, this working memory model suggests a novel solution to the “binding problem”, a long-standing and fundamental issue in cognitive neuroscience. -

Large-Scale Simulations of Plastic Neural Networks on Neuromorphic Hardware
ORIGINAL RESEARCH published: 07 April 2016 doi: 10.3389/fnana.2016.00037 Large-Scale Simulations of Plastic Neural Networks on Neuromorphic Hardware James C. Knight 1*, Philip J. Tully 2, 3, 4, Bernhard A. Kaplan 5, Anders Lansner 2, 3, 6 and Steve B. Furber 1 1 Advanced Processor Technologies Group, School of Computer Science, University of Manchester, Manchester, UK, 2 Department of Computational Biology, Royal Institute of Technology, Stockholm, Sweden, 3 Stockholm Brain Institute, Karolinska Institute, Stockholm, Sweden, 4 Institute for Adaptive and Neural Computation, School of Informatics, University of Edinburgh, Edinburgh, UK, 5 Department of Visualization and Data Analysis, Zuse Institute Berlin, Berlin, Germany, 6 Department of Numerical analysis and Computer Science, Stockholm University, Stockholm, Sweden SpiNNaker is a digital, neuromorphic architecture designed for simulating large-scale spiking neural networks at speeds close to biological real-time. Rather than using bespoke analog or digital hardware, the basic computational unit of a SpiNNaker system is a general-purpose ARM processor, allowing it to be programmed to simulate a wide variety of neuron and synapse models. This flexibility is particularly valuable in the study of Edited by: biological plasticity phenomena. A recently proposed learning rule based on the Bayesian Wolfram Schenck, University of Applied Sciences Confidence Propagation Neural Network (BCPNN) paradigm offers a generic framework Bielefeld, Germany for modeling the interaction of different plasticity mechanisms using spiking neurons. Reviewed by: However, it can be computationally expensive to simulate large networks with BCPNN Guy Elston, learning since it requires multiple state variables for each synapse, each of which needs Centre for Cognitive Neuroscience, Australia to be updated every simulation time-step.