Solid Angle, 3D Integrals, Gauss's Theorem, and a Delta Function
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spheres in Infinite-Dimensional Normed Spaces Are Lipschitz Contractible
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 88. Number 3, July 1983 SPHERES IN INFINITE-DIMENSIONAL NORMED SPACES ARE LIPSCHITZ CONTRACTIBLE Y. BENYAMINI1 AND Y. STERNFELD Abstract. Let X be an infinite-dimensional normed space. We prove the following: (i) The unit sphere {x G X: || x II = 1} is Lipschitz contractible. (ii) There is a Lipschitz retraction from the unit ball of JConto the unit sphere. (iii) There is a Lipschitz map T of the unit ball into itself without an approximate fixed point, i.e. inffjjc - Tx\\: \\x\\ « 1} > 0. Introduction. Let A be a normed space, and let Bx — {jc G X: \\x\\ < 1} and Sx = {jc G X: || jc || = 1} be its unit ball and unit sphere, respectively. Brouwer's fixed point theorem states that when X is finite dimensional, every continuous self-map of Bx admits a fixed point. Two equivalent formulations of this theorem are the following. 1. There is no continuous retraction from Bx onto Sx. 2. Sx is not contractible, i.e., the identity map on Sx is not homotopic to a constant map. It is well known that none of these three theorems hold in infinite-dimensional spaces (see e.g. [1]). The natural generalization to infinite-dimensional spaces, however, would seem to require the maps to be uniformly-continuous and not merely continuous. Indeed in the finite-dimensional case this condition is automatically satisfied. In this article we show that the above three theorems fail, in the infinite-dimen- sional case, even under the strongest uniform-continuity condition, namely, for maps satisfying a Lipschitz condition. -

Examples of Manifolds
Examples of Manifolds Example 1 (Open Subset of IRn) Any open subset, O, of IRn is a manifold of dimension n. One possible atlas is A = (O, ϕid) , where ϕid is the identity map. That is, ϕid(x) = x. n Of course one possible choice of O is IR itself. Example 2 (The Circle) The circle S1 = (x,y) ∈ IR2 x2 + y2 = 1 is a manifold of dimension one. One possible atlas is A = {(U , ϕ ), (U , ϕ )} where 1 1 1 2 1 y U1 = S \{(−1, 0)} ϕ1(x,y) = arctan x with − π < ϕ1(x,y) <π ϕ1 1 y U2 = S \{(1, 0)} ϕ2(x,y) = arctan x with 0 < ϕ2(x,y) < 2π U1 n n n+1 2 2 Example 3 (S ) The n–sphere S = x =(x1, ··· ,xn+1) ∈ IR x1 +···+xn+1 =1 n A U , ϕ , V ,ψ i n is a manifold of dimension . One possible atlas is 1 = ( i i) ( i i) 1 ≤ ≤ +1 where, for each 1 ≤ i ≤ n + 1, n Ui = (x1, ··· ,xn+1) ∈ S xi > 0 ϕi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n Vi = (x1, ··· ,xn+1) ∈ S xi < 0 ψi(x1, ··· ,xn+1)=(x1, ··· ,xi−1,xi+1, ··· ,xn+1) n So both ϕi and ψi project onto IR , viewed as the hyperplane xi = 0. Another possible atlas is n n A2 = S \{(0, ··· , 0, 1)}, ϕ , S \{(0, ··· , 0, −1)},ψ where 2x1 2xn ϕ(x , ··· ,xn ) = , ··· , 1 +1 1−xn+1 1−xn+1 2x1 2xn ψ(x , ··· ,xn ) = , ··· , 1 +1 1+xn+1 1+xn+1 are the stereographic projections from the north and south poles, respectively. -
Compton Scattering from the Deuteron at Low Energies
SE0200264 LUNFD6-NFFR-1018 Compton Scattering from the Deuteron at Low Energies Magnus Lundin Department of Physics Lund University 2002 W' •sii" Compton spridning från deuteronen vid låga energier (populärvetenskaplig sammanfattning på svenska) Vid Compton spridning sprids fotonen elastiskt, dvs. utan att förlora energi, mot en annan partikel eller kärna. Kärnorna som användes i detta försök består av en proton och en neutron (sk. deuterium, eller tungt väte). Kärnorna bestrålades med fotoner av kända energier och de spridda fo- tonerna detekterades mha. stora Nal-detektorer som var placerade i olika vinklar runt strålmålet. Försöket utfördes under 8 veckor och genom att räkna antalet fotoner som kärnorna bestålades med och antalet spridda fo- toner i de olika detektorerna, kan sannolikheten för att en foton skall spridas bestämmas. Denna sannolikhet jämfördes med en teoretisk modell som beskriver sannolikheten för att en foton skall spridas elastiskt mot en deuterium- kärna. Eftersom protonen och neutronen består av kvarkar, vilka har en elektrisk laddning, kommer dessa att sträckas ut då de utsätts för ett elek- triskt fält (fotonen), dvs. de polariseras. Värdet (sannolikheten) som den teoretiska modellen ger, beror på polariserbarheten hos protonen och neu- tronen i deuterium. Genom att beräkna sannolikheten för fotonspridning för olika värden av polariserbarheterna, kan man se vilket värde som ger bäst överensstämmelse mellan modellen och experimentella data. Det är speciellt neutronens polariserbarhet som är av intresse, och denna kunde bestämmas i detta arbete. Organization Document name LUND UNIVERSITY DOCTORAL DISSERTATION Department of Physics Date of issue 2002.04.29 Division of Nuclear Physics Box 118 Sponsoring organization SE-22100 Lund Sweden Author (s) Magnus Lundin Title and subtitle Compton Scattering from the Deuteron at Low Energies Abstract A series of three Compton scattering experiments on deuterium have been performed at the high-resolution tagged-photon facility MAX-lab located in Lund, Sweden. -

Convolution on the N-Sphere with Application to PDF Modeling Ivan Dokmanic´, Student Member, IEEE, and Davor Petrinovic´, Member, IEEE
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 58, NO. 3, MARCH 2010 1157 Convolution on the n-Sphere With Application to PDF Modeling Ivan Dokmanic´, Student Member, IEEE, and Davor Petrinovic´, Member, IEEE Abstract—In this paper, we derive an explicit form of the convo- emphasis on wavelet transform in [8]–[12]. Computation of the lution theorem for functions on an -sphere. Our motivation comes Fourier transform and convolution on groups is studied within from the design of a probability density estimator for -dimen- the theory of noncommutative harmonic analysis. Examples sional random vectors. We propose a probability density function (pdf) estimation method that uses the derived convolution result of applications of noncommutative harmonic analysis in engi- on . Random samples are mapped onto the -sphere and esti- neering are analysis of the motion of a rigid body, workspace mation is performed in the new domain by convolving the samples generation in robotics, template matching in image processing, with the smoothing kernel density. The convolution is carried out tomography, etc. A comprehensive list with accompanying in the spectral domain. Samples are mapped between the -sphere theory and explanations is given in [13]. and the -dimensional Euclidean space by the generalized stereo- graphic projection. We apply the proposed model to several syn- Statistics of random vectors whose realizations are observed thetic and real-world data sets and discuss the results. along manifolds embedded in Euclidean spaces are commonly termed directional statistics. An excellent review may be found Index Terms—Convolution, density estimation, hypersphere, hy- perspherical harmonics, -sphere, rotations, spherical harmonics. in [14]. It is of interest to develop tools for the directional sta- tistics in analogy with the ordinary Euclidean. -

Minkowski Products of Unit Quaternion Sets 1 Introduction
Minkowski products of unit quaternion sets 1 Introduction The Minkowski sum A⊕B of two point sets A; B 2 Rn is the set of all points generated [16] by the vector sums of points chosen independently from those sets, i.e., A ⊕ B := f a + b : a 2 A and b 2 B g : (1) The Minkowski sum has applications in computer graphics, geometric design, image processing, and related fields [9, 11, 12, 13, 14, 15, 20]. The validity of the definition (1) in Rn for all n ≥ 1 stems from the straightforward extension of the vector sum a + b to higher{dimensional Euclidean spaces. However, to define a Minkowski product set A ⊗ B := f a b : a 2 A and b 2 B g ; (2) it is necessary to specify products of points in Rn. In the case n = 1, this is simply the real{number product | the resulting algebra of point sets in R1 is called interval arithmetic [17, 18] and is used to monitor the propagation of uncertainty through computations in which the initial operands (and possibly also the arithmetic operations) are not precisely determined. A natural realization of the Minkowski product (2) in R2 may be achieved [7] by interpreting the points a and b as complex numbers, with a b being the usual complex{number product. Algorithms to compute Minkowski products of complex{number sets have been formulated [6], and extended to determine Minkowski roots and powers [3, 8] of complex sets; to evaluate polynomials specified by complex{set coefficients and arguments [4]; and to solve simple equations expressed in terms of complex{set coefficients and unknowns [5]. -
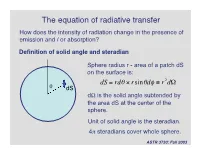
The Equation of Radiative Transfer How Does the Intensity of Radiation Change in the Presence of Emission and / Or Absorption?
The equation of radiative transfer How does the intensity of radiation change in the presence of emission and / or absorption? Definition of solid angle and steradian Sphere radius r - area of a patch dS on the surface is: dS = rdq ¥ rsinqdf ≡ r2dW q dS dW is the solid angle subtended by the area dS at the center of the † sphere. Unit of solid angle is the steradian. 4p steradians cover whole sphere. ASTR 3730: Fall 2003 Definition of the specific intensity Construct an area dA normal to a light ray, and consider all the rays that pass through dA whose directions lie within a small solid angle dW. Solid angle dW dA The amount of energy passing through dA and into dW in time dt in frequency range dn is: dE = In dAdtdndW Specific intensity of the radiation. † ASTR 3730: Fall 2003 Compare with definition of the flux: specific intensity is very similar except it depends upon direction and frequency as well as location. Units of specific intensity are: erg s-1 cm-2 Hz-1 steradian-1 Same as Fn Another, more intuitive name for the specific intensity is brightness. ASTR 3730: Fall 2003 Simple relation between the flux and the specific intensity: Consider a small area dA, with light rays passing through it at all angles to the normal to the surface n: n o In If q = 90 , then light rays in that direction contribute zero net flux through area dA. q For rays at angle q, foreshortening reduces the effective area by a factor of cos(q). -

GEOMETRY Contents 1. Euclidean Geometry 2 1.1. Metric Spaces 2 1.2
GEOMETRY JOUNI PARKKONEN Contents 1. Euclidean geometry 2 1.1. Metric spaces 2 1.2. Euclidean space 2 1.3. Isometries 4 2. The sphere 7 2.1. More on cosine and sine laws 10 2.2. Isometries 11 2.3. Classification of isometries 12 3. Map projections 14 3.1. The latitude-longitude map 14 3.2. Stereographic projection 14 3.3. Inversion 14 3.4. Mercator’s projection 16 3.5. Some Riemannian geometry. 18 3.6. Cylindrical projection 18 4. Triangles in the sphere 19 5. Minkowski space 21 5.1. Bilinear forms and Minkowski space 21 5.2. The orthogonal group 22 6. Hyperbolic space 24 6.1. Isometries 25 7. Models of hyperbolic space 30 7.1. Klein’s model 30 7.2. Poincaré’s ball model 30 7.3. The upper halfspace model 31 8. Some geometry and techniques 32 8.1. Triangles 32 8.2. Geodesic lines and isometries 33 8.3. Balls 35 9. Riemannian metrics, area and volume 36 Last update: December 12, 2014. 1 1. Euclidean geometry 1.1. Metric spaces. A function d: X × X ! [0; +1[ is a metric in the nonempty set X if it satisfies the following properties (1) d(x; x) = 0 for all x 2 X and d(x; y) > 0 if x 6= y, (2) d(x; y) = d(y; x) for all x; y 2 X, and (3) d(x; y) ≤ d(x; z) + d(z; y) for all x; y; z 2 X (the triangle inequality). The pair (X; d) is a metric space. -

Lp Unit Spheres and the Α-Geometries: Questions and Perspectives
entropy Article Lp Unit Spheres and the a-Geometries: Questions and Perspectives Paolo Gibilisco Department of Economics and Finance, University of Rome “Tor Vergata”, Via Columbia 2, 00133 Rome, Italy; [email protected] Received: 12 November 2020; Accepted: 10 December 2020; Published: 14 December 2020 Abstract: In Information Geometry, the unit sphere of Lp spaces plays an important role. In this paper, the aim is list a number of open problems, in classical and quantum IG, which are related to Lp geometry. Keywords: Lp spheres; a-geometries; a-Proudman–Johnson equations Gentlemen: there’s lots of room left in Lp spaces. 1. Introduction Chentsov theorem is the fundamental theorem in Information Geometry. After Rao’s remark on the geometric nature of the Fisher Information (in what follows shortly FI), it is Chentsov who showed that on the simplex of the probability vectors, up to scalars, FI is the unique Riemannian geometry, which “contract under noise” (to have an idea of recent developments about this see [1]). So FI appears as the “natural” Riemannian geometry over the manifolds of density vectors, namely over 1 n Pn := fr 2 R j ∑ ri = 1, ri > 0g i Since FI is the pull-back of the map p r ! 2 r it is natural to study the geometries induced on the simplex of probability vectors by the embeddings 8 1 <p · r p p 2 [1, +¥) Ap(r) = :log(r) p = +¥ Setting 2 p = a 2 [−1, 1] 1 − a we call the corresponding geometries on the simplex of probability vectors a-geometries (first studied by Chentsov himself). -

17 Measure Concentration for the Sphere
17 Measure Concentration for the Sphere In today’s lecture, we will prove the measure concentration theorem for the sphere. Recall that this was one of the vital steps in the analysis of the Arora-Rao-Vazirani approximation algorithm for sparsest cut. Most of the material in today’s lecture is adapted from Matousek’s book [Mat02, chapter 14] and Keith Ball’s lecture notes on convex geometry [Bal97]. n n−1 Notation: We will use the notation Bn to denote the ball of unit radius in R and S n to denote the sphere of unit radius in R . Let µ denote the normalized measure on the unit sphere (i.e., for any measurable set S ⊆ Sn−1, µ(A) denotes the ratio of the surface area of µ to the entire surface area of the sphere Sn−1). Recall that the n-dimensional volume of a ball n n n of radius r in R is given by the formula Vol(Bn) · r = vn · r where πn/2 vn = n Γ 2 + 1 Z ∞ where Γ(x) = tx−1e−tdt 0 n−1 The surface area of the unit sphere S is nvn. Theorem 17.1 (Measure Concentration for the Sphere Sn−1) Let A ⊆ Sn−1 be a mea- n−1 surable subset of the unit sphere S such that µ(A) = 1/2. Let Aδ denote the δ-neighborhood n−1 n−1 of A in S . i.e., Aδ = {x ∈ S |∃z ∈ A, ||x − z||2 ≤ δ}. Then, −nδ2/2 µ(Aδ) ≥ 1 − 2e . Thus, the above theorem states that if A is any set of measure 0.5, taking a step of even √ O (1/ n) around A covers almost 99% of the entire sphere. -

On Expansive Mappings
mathematics Article On Expansive Mappings Marat V. Markin and Edward S. Sichel * Department of Mathematics, California State University, Fresno 5245 N. Backer Avenue, M/S PB 108, Fresno, CA 93740-8001, USA; [email protected] * Correspondence: [email protected] Received: 23 August 2019; Accepted: 17 October 2019; Published: 23 October 2019 Abstract: When finding an original proof to a known result describing expansive mappings on compact metric spaces as surjective isometries, we reveal that relaxing the condition of compactness to total boundedness preserves the isometry property and nearly that of surjectivity. While a counterexample is found showing that the converse to the above descriptions do not hold, we are able to characterize boundedness in terms of specific expansions we call anticontractions. Keywords: Metric space; expansion; compactness; total boundedness MSC: Primary 54E40; 54E45; Secondary 46T99 O God, I could be bounded in a nutshell, and count myself a king of infinite space - were it not that I have bad dreams. William Shakespeare (Hamlet, Act 2, Scene 2) 1. Introduction We take a close look at the nature of expansive mappings on certain metric spaces (compact, totally bounded, and bounded), provide a finer classification for such mappings, and use them to characterize boundedness. When finding an original proof to a known result describing all expansive mappings on compact metric spaces as surjective isometries [1] (Problem X.5.13∗), we reveal that relaxing the condition of compactness to total boundedness still preserves the isometry property and nearly that of surjectivity. We provide a counterexample of a not totally bounded metric space, on which the only expansion is the identity mapping, demonstrating that the converse to the above descriptions do not hold. -
Slides for Statistics, Precision, and Solid Angle
Slides for Statistics, Precision, and Solid Angle 22.01 – Intro to Radiation October 14, 2015 22.01 – Intro to Ionizing Radiation Precision etc., Slide 1 Solid Angles, Dose vs. Distance • Dose decreases with the inverse square of distance from the source: 1 퐷표푠푒 ∝ 푟2 • This is due to the decrease in solid angle subtended by the detector, shielding, person, etc. absorbing the radiation 22.01 – Intro to Ionizing Radiation Precision etc., Slide 2 Solid Angles, Dose vs. Distance • The solid angle is defined in steradians, and given the symbol Ω. • For a rectangle with width w and length l, at a distance r from a point source: 푤푙 Ω = 4푎푟푐푡푎푛 2푟 4푟2 + w2 + 푙2 • A full sphere has 4π steradians (Sr) 22.01 – Intro to Ionizing Radiation Precision etc., Slide 3 Solid Angles, Dose vs. Distance http://www.powerfromthesun.net/Book/chapter02/chapter02.html • Total luminance (activity) of a source is constant, but the flux through a surface decreases with distance Courtesy of William B. Stine. Used with permission. 22.01 – Intro to Ionizing Radiation Precision etc., Slide 4 Exponential Gamma Attenuation • Gamma sources are attenuated exponentially according to this formula: Initial intensity Mass attenuation coefficient 흁 Distance through − 흆 흆풙 푰 = 푰ퟎ풆 material Transmitted intensity Material density • Attenuation means removal from a narrowly collimated beam by any means 22.01 – Intro to Ionizing Radiation Precision etc., Slide 5 Exponential Gamma Attenuation Look up values in NIST x-ray attenuation tables: http://www.nist.gov/pml/data/xraycoef/ Initial -

Visualization of Quaternions with Clifford Parallelism
Proceedings of the 20th Asian Technology Conference in Mathematics (Leshan, China, 2015) Visualization of quaternions with Clifford parallelism Yoichi Maeda [email protected] Department of Mathematics Tokai University Japan Abstract: In this paper, we try to visualize multiplication of unit quaternions with dynamic geometry software Cabri 3D. The three dimensional sphere is identified with the set of unit quaternions. Multiplication of unit quaternions is deeply related with Clifford parallelism, a special isometry in . 1. Introduction The quaternions are a number system that extends the complex numbers. They were first described by William R. Hamilton in 1843 ([1] p.186, [3]). The identities 1, where , and are basis elements of , determine all the possible products of , and : ,,,,,. For example, if 1 and 23, then, 12 3 2 3 2 3. We are very used to the complex numbers and we have a simple geometric image of the multiplication of complex numbers with the complex plane. How about the multiplication of quaternions? This is the motivation of this research. Fortunately, a unit quaternion with norm one (‖‖ 1) is regarded as a point in . In addition, we have the stereographic projection from to . Therefore, we can visualize three quaternions ,, and as three points in . What is the geometric relation among them? Clifford parallelism plays an important role for the understanding of the multiplication of quaternions. In section 2, we review the stereographic projection. With this projection, we try to construct Clifford parallel in Section 3. Finally, we deal with the multiplication of unit quaternions in Section 4. 2. Stereographic projection of the three-sphere The stereographic projection of the two dimensional sphere ([1, page 260], [2, page 74]) is a very important map in mathematics.