Chapter 3 Static Equilibrium
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Vector Mechanics: Statics
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider www.PDHcenter.com PDHonline Course G492 www.PDHonline.org Table of Contents Introduction ..................................................................................................................................... 1 Vectors ............................................................................................................................................ 1 Vector Decomposition ................................................................................................................ 2 Components of a Vector ............................................................................................................. 2 Force ............................................................................................................................................... 4 Equilibrium ..................................................................................................................................... 5 Equilibrium of a Particle ............................................................................................................. 6 Rigid Bodies.............................................................................................................................. 10 Pulleys ...................................................................................................................................... -

Knowledge Assessment in Statics: Concepts Versus Skills
Session 1168 Knowledge Assessment in Statics: Concepts versus skills Scott Danielson Arizona State University Abstract Following the lead of the physics community, engineering faculty have recognized the value of good assessment instruments for evaluating the learning of their students. These assessment instruments can be used to both measure student learning and to evaluate changes in teaching, i.e., did student-learning increase due different ways of teaching. As a result, there are significant efforts underway to develop engineering subject assessment tools. For instance, the Foundation Coalition is supporting assessment tool development efforts in a number of engineering subjects. These efforts have focused on developing “concept” inventories. These concept inventories focus on determining student understanding of the subject’s fundamental concepts. Separately, a NSF-supported effort to develop an assessment tool for statics was begun in the last year by the authors. As a first step, the project team analyzed prior work aimed at delineating important knowledge areas in statics. They quickly recognized that these important knowledge areas contained both conceptual and “skill” components. Both knowledge areas are described and examples of each are provided. Also, a cognitive psychology-based taxonomy of declarative and procedural knowledge is discussed in relation to determining the difference between a concept and a skill. Subsequently, the team decided to focus on development of a concept-based statics assessment tool. The ongoing Delphi process to refine the inventory of important statics concepts and validate the concepts with a broader group of subject matter experts is described. However, the value and need for a skills-based assessment tool is also recognized. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy. -

1 Lab 10: Statics and Torque Lab Objectives: • to Understand Torque
Lab 10: Statics and Torque Lab Objectives: • To understand torque • To be able to calculate the torque created by a force and the net torque on an object • To understand the conditions for static equilibrium Equipment: • Meter stick balance • Mass hangers • Masses • Spring scale • Meter stick for measurement • Two bathroom scales Exploration 1 Balance At your lab table is a meter stick to which masses can be added. Balance the meter stick (parallel to the table) on the pivot without any mass hangers or masses on either side of the pivot. The meter stick may not balance at the exact middle of the meter stick. However, when it is balanced, there is an equal amount of mass on each side of the meter stick. This will be our starting position. Exploration 1.1 Add masses to each side of the rod so that the rod does not rotate, but is balanced (parallel to the table). In particular, add two masses to one side and one mass to the other side. Is there more than one arrangement that will balance the rod? Explain. 1 Exploration 1.2 Consider a meter stick balance that is free to rotate, as in the picture below. If the following arrangement of masses were placed on the meter stick while someone was holding it level, then the meter stick was released, would the meter stick remain balanced? Show any calculations and explain. Exploration 1.3 For the case in Exploration 1.2, determine the total force upwards and the total force downwards. Draw a force diagram for the rod. -

Molecular Statics Study of Depth-Dependent Hysteresis in Nano-Scale Adhesive Elastic Contacts
Molecular statics study of depth-dependent hysteresis in nano-scale adhesive elastic contacts Weilin Deng and Haneesh Kesari z School of Engineering, Brown University, Providence, RI 02912-0936, USA E-mail: haneesh [email protected] March 2017 Abstract. The contact force{indentation-depth (P -h) measurements in adhesive contact experiments, such as atomic force microscopy, display hysteresis. In some cases, the amount of hysteretic energy loss is found to depend on the maximum indentation- depth. This depth-dependent hysteresis (DDH) is not explained by classical contact theories, such as JKR and DMT, and is often attributed to surface moisture, material viscoelasticity, and plasticity. We present molecular statics simulations that are devoid of these mechanisms, yet still capture DDH. In our simulations, DDH is due to a series of surface mechanical instabilities. Surface features, such as depressions or protrusions, can temporarily arrest the growth or recession of the contact area. With a sufficiently large change of indentation-depth, the contact area grows or recedes abruptly by a finite amount and dissipates energy. This is similar to the pull-in and pull-off instabilities in classical contact theories, except that in this case the number of instabilities depends on the roughness of the contact surface. Larger maximum indentation-depths result in more surface features participating in the load-unload process, resulting in larger hysteretic energy losses. This mechanism is similar to the one recently proposed by one of the authors using a continuum mechanics-based model. However, that model predicts that the hysteretic energy loss always increases with roughness, whereas experimentally it is found that the hysteretic energy loss initially increases but then later decreases with roughness. -

Equations of Static Equilibrium
49 FREE BODY DIAGRAMS (FBDs) Learning Objectives 1). To inspect the supports of a rigid body in order to determine the nature of the reactions, and to use that information to draw a free body diagram (FBD). Force/Moment Classifications External Forces/Moments: applied forces/moments which are typically known or prescribed (e.g., forces/moments due to cables springs, gravity, etc.). Reaction Forces/Moments: constraining forces/moments at supports intended to prevent motion (usually nonexistent unless system is externally loaded). Free Body Diagram (FBD) Free Body Diagram (FBD): a graphical sketch of the system showing a coordinate system, all external/reaction forces and moments, and key geometric dimensions. Benefits: 1). Provides a coordinate system to establish a solution methodology. 2). Provides a graphical display of all forces/moments acting on the rigid body. 3). Provides a record of geometric dimensions needed for establishing moments of the forces. 50 STATIC EQUILIBRIUM OF RIGID BODIES (2-D) Learning Objectives 1). To evaluate the unknown reactions holding a rigid body in equilibrium by solving the equations of static equilibrium. 2). To recognize situations of partial and improper constraint, as well as static indeterminacy, on the basis of the solvability of the equations of static equilibrium. Newton’s First Law Given no net force, a body at rest will remain at rest (and a body moving at a constant velocity will continue to do so along a straight path). Definitions Zero-Force Members: structural members that support no loading but aid in the stability of the truss. Two-Force Members: structural members that are: a) subject to no applied or reaction moments, and b) are loaded only at two pin joints along the member. -

Is There Least Action Principle in Stochastic Dynamics? Qiuping A
Is there least action principle in stochastic dynamics? Qiuping A. Wang To cite this version: Qiuping A. Wang. Is there least action principle in stochastic dynamics?. 2007. hal-00141482v1 HAL Id: hal-00141482 https://hal.archives-ouvertes.fr/hal-00141482v1 Preprint submitted on 13 Apr 2007 (v1), last revised 8 Dec 2007 (v3) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Is there least action principle in stochastic dynamics? Qiuping A. Wang Institut Supérieur des Matériaux et Mécaniques Avancées du Mans, 44 Av. Bartholdi, 72000 Le Mans, France Abstract On the basis of the work showing that the maximum entropy principle for equilibrium mechanical system is a consequence of the principle of virtual work, i.e., the virtual work of random forces on a mechanical system should vanish in thermodynamic equilibrium, we present in this paper a development of the same principle for the dynamical system out of equilibrium. One of the objectives of the present work is to justify a least action principle we postulated previously for stochastic mechanical systems. PACS numbers 05.70.Ln (Nonequilibrium and irreversible thermodynamics) 02.50.Ey (Stochastic processes) 02.30.Xx (Calculus of variations) 05.40.-a (Fluctuation phenomena) 1 1) Introduction The least action principle1 first developed by Maupertuis[1][2] is originally formulated for regular dynamics of mechanical system. -

Statics - TAM 211
Statics - TAM 211 Lecture 32 April 9, 2018 Chap 10.1, 10.2, 10.4, 10.8 Announcements No class Wednesday April 11 No office hours for Prof. H-W on Wednesday April 11 Upcoming deadlines: Tuesday (4/10) PL HW 12 Thursday (4/12) WA 5 due Monday (4/16) Mastering Engineering Tutorial 14 Chapter 10: Moments of Inertia Goals and Objectives • Understand the term “moment” as used in this chapter • Determine and know the differences between • First/second moment of area • Moment of inertia for an area • Polar moment of inertia • Mass moment of inertia • Introduce the parallel-axis theorem. • Be able to compute the moments of inertia of composite areas. Applications Many structural members like beams and columns have cross sectional shapes like an I, H, C, etc.. Why do they usually not have solid rectangular, square, or circular cross sectional areas? What primary property of these members influences design decisions? Applications Many structural members are made of tubes rather than solid squares or rounds. Why? This section of the book covers some parameters of the cross sectional area that influence the designer’s selection. Recap: First moment of an area (centroid of an area) The first moment of the area A with respect to the x-axis is given by The first moment of the area A with respect to the y-axis is given by The centroid of the area A is defined as the point C of coordinates and , which satisfies the relation In the case of a composite area, we divide the area A into parts , , Terminology: the term moment in this module refers to the mathematical sense of different “measures” of an area or volume. -

Stevin, Huygens and the Dutch Republic Dijksterhuis
1 1 100 NAW 5/9 nr. 2 June 2008 The golden age of mathematics. Stevin, Huygens and the Dutch republic Dijksterhuis Fokko Jan Dijksterhuis Science, Technology, Health and Policy Studies (STeHPS) Universiteit Twente, Faculteit MB Postbus 217 7500AE Enschede The Netherlands [email protected] History The golden age of mathematics Stevin, Huygens and the Dutch republic Mathematics played its role in the rise of the Dutch Republic. Simon Stevin and Christiaan its formation. Half a century later, the wealth, Huygens were key figures in this. Though from very different backgrounds, both gave shape to the power and the splendour of the republic Dutch culture. Fokko Jan Dijksterhuis, who recently received an NWO-vidi grant for his research had been established (and had even begun to on the history of mathematics, discusses their influence on mathematics and its historical wane) with Huygens as its main mathematical significance. representative. The hands-on mathematics of Stevin differed greatly from Huygens’ aris- The 17th century was the golden age of the Recent developments in cultural history have tocratic geometry and yet, as will be argued Dutch republic. A small state lacking sub- opened new perspectives on the mathemat- here, they had essential features in common. stantial natural resources, from the 1580s on- ical pursuits of the Dutch republic.[1] Under- In this article, the work of Stevin and Huygens wards it quickly became a wealthy trade cen- standing the brilliant ideas of Stevin and Huy- will be sketched as part of, and giving shape tre that played a leading part in international gens in their historical context promises a new to, the golden age. -
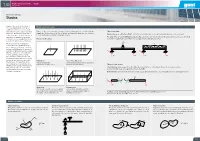
Statics 1 Introduction Gunt
Engineering mechanics – statics 1 Introduction gunt Basic knowledge Statics Statics is the study of the effect of Basic terms of statics forces on rigid bodies, which are in equilibrium. Two forces are in equilib- rium when they are equal, in opposing Force, as the cause of motion changes and/or deformations, is described by its Division by origin magnitude, the position of the line of action, and direction along the line of action. directions, and have the same line of Physical force or active force (F, q): acts in the normal direction on a body (e.g. weight, wind pressure and snow). action. In statics, a body is considered Forces are divided according to different criteria: rigid when deformations, caused by Reaction force or constraining force (AV, AH, BV): acts in the opposite direction to the physical force and causes the body acting forces, are negligibly small com- Division by dimension to remain in equilibrium (e.g. normal force FN, support force and adhesive force). pared to the dimensions of the body. FG The main task of static analysis is q to determine the equilibrium of the forces applied on a body or a mechan- ical system. Building on the axioms of mechanics, rigid-body mechanics deals AH AH with the equivalence and equilibrium of force systems, centre-of-grav- A B A B ity calculations, internal forces, and V V V V moments in beams and trusses along with problems on friction. Generally, Point force: Linear force/line load: the fi eld looks at supporting struc- only acts on a point continuously distributed force along a line tures that are at rest and that must (idealisation in mechanics) (idealisation in mechanics) Division in the system remain at rest owing to their function. -

9 Statics and Torque
CHAPTER 9 | STATICS AND TORQUE 289 9 STATICS AND TORQUE Figure 9.1 On a short time scale, rocks like these in Australia’s Kings Canyon are static, or motionless relative to the Earth. (credit: freeaussiestock.com) Learning Objectives 9.1. The First Condition for Equilibrium • State the first condition of equilibrium. • Explain static equilibrium. • Explain dynamic equilibrium. 9.2. The Second Condition for Equilibrium • State the second condition that is necessary to achieve equilibrium. • Explain torque and the factors on which it depends. • Describe the role of torque in rotational mechanics. 9.3. Stability • State the types of equilibrium. • Describe stable and unstable equilibriums. • Describe neutral equilibrium. 9.4. Applications of Statics, Including Problem-Solving Strategies • Discuss the applications of Statics in real life. • State and discuss various problem-solving strategies in Statics. 9.5. Simple Machines • Describe different simple machines. • Calculate the mechanical advantage. 9.6. Forces and Torques in Muscles and Joints • Explain the forces exerted by muscles. • State how a bad posture causes back strain. • Discuss the benefits of skeletal muscles attached close to joints. • Discuss various complexities in the real system of muscles, bones, and joints. Introduction to Statics and Torque What might desks, bridges, buildings, trees, and mountains have in common—at least in the eyes of a physicist? The answer is that they are ordinarily motionless relative to the Earth. Furthermore, their acceleration is zero because they remain motionless. That means they also have 290 CHAPTER 9 | STATICS AND TORQUE something in common with a car moving at a constant velocity, because anything with a constant velocity also has an acceleration of zero.