History of Continuum Mechanics – Robert W
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Vector Mechanics: Statics
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider www.PDHcenter.com PDHonline Course G492 www.PDHonline.org Table of Contents Introduction ..................................................................................................................................... 1 Vectors ............................................................................................................................................ 1 Vector Decomposition ................................................................................................................ 2 Components of a Vector ............................................................................................................. 2 Force ............................................................................................................................................... 4 Equilibrium ..................................................................................................................................... 5 Equilibrium of a Particle ............................................................................................................. 6 Rigid Bodies.............................................................................................................................. 10 Pulleys ...................................................................................................................................... -

Knowledge Assessment in Statics: Concepts Versus Skills
Session 1168 Knowledge Assessment in Statics: Concepts versus skills Scott Danielson Arizona State University Abstract Following the lead of the physics community, engineering faculty have recognized the value of good assessment instruments for evaluating the learning of their students. These assessment instruments can be used to both measure student learning and to evaluate changes in teaching, i.e., did student-learning increase due different ways of teaching. As a result, there are significant efforts underway to develop engineering subject assessment tools. For instance, the Foundation Coalition is supporting assessment tool development efforts in a number of engineering subjects. These efforts have focused on developing “concept” inventories. These concept inventories focus on determining student understanding of the subject’s fundamental concepts. Separately, a NSF-supported effort to develop an assessment tool for statics was begun in the last year by the authors. As a first step, the project team analyzed prior work aimed at delineating important knowledge areas in statics. They quickly recognized that these important knowledge areas contained both conceptual and “skill” components. Both knowledge areas are described and examples of each are provided. Also, a cognitive psychology-based taxonomy of declarative and procedural knowledge is discussed in relation to determining the difference between a concept and a skill. Subsequently, the team decided to focus on development of a concept-based statics assessment tool. The ongoing Delphi process to refine the inventory of important statics concepts and validate the concepts with a broader group of subject matter experts is described. However, the value and need for a skills-based assessment tool is also recognized. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
Modeling the Physics of RRAM Defects
Modeling the physics of RRAM defects A model simulating RRAM defects on a macroscopic physical level T. Hol Modeling the physics of RRAM defects A model simulating RRAM defects on a macroscopic physical level by T. Hol to obtain the degree of Master of Science at the Delft University of Technology, to be defended publicly on Friday August 28, 2020 at 13:00. Student number: 4295528 Project duration: September 1, 2019 – August 28, 2020 Thesis committee: Prof. dr. ir. S. Hamdioui TU Delft, supervisor Dr. Ir. R. Ishihara TU Delft Dr. Ir. S. Vollebregt TU Delft Dr. Ir. M. Taouil TU Delft Ir. M. Fieback TU Delft, supervisor An electronic version of this thesis is available at https://repository.tudelft.nl/. Abstract Resistive RAM, or RRAM, is one of the emerging non-volatile memory (NVM) technologies, which could be used in the near future to fill the gap in the memory hierarchy between dynamic RAM (DRAM) and Flash, or even completely replace Flash. RRAM operates faster than Flash, but is still non-volatile, which enables it to be used in a dense 3D NVM array. It is also a suitable candidate for computation-in-memory, neuromorphic computing and reconfigurable computing. However, the show stopping problem of RRAM is that it suffers from unique defects, which is the reason why RRAM is still not widely commercially adopted. These defects differ from those that appear in CMOS technology, due to the arbitrary nature of the forming process. They can not be detected by conventional tests and cause defective devices to go unnoticed. -

Viscosity of Gases References
VISCOSITY OF GASES Marcia L. Huber and Allan H. Harvey The following table gives the viscosity of some common gases generally less than 2% . Uncertainties for the viscosities of gases in as a function of temperature . Unless otherwise noted, the viscosity this table are generally less than 3%; uncertainty information on values refer to a pressure of 100 kPa (1 bar) . The notation P = 0 specific fluids can be found in the references . Viscosity is given in indicates that the low-pressure limiting value is given . The dif- units of μPa s; note that 1 μPa s = 10–5 poise . Substances are listed ference between the viscosity at 100 kPa and the limiting value is in the modified Hill order (see Introduction) . Viscosity in μPa s 100 K 200 K 300 K 400 K 500 K 600 K Ref. Air 7 .1 13 .3 18 .5 23 .1 27 .1 30 .8 1 Ar Argon (P = 0) 8 .1 15 .9 22 .7 28 .6 33 .9 38 .8 2, 3*, 4* BF3 Boron trifluoride 12 .3 17 .1 21 .7 26 .1 30 .2 5 ClH Hydrogen chloride 14 .6 19 .7 24 .3 5 F6S Sulfur hexafluoride (P = 0) 15 .3 19 .7 23 .8 27 .6 6 H2 Normal hydrogen (P = 0) 4 .1 6 .8 8 .9 10 .9 12 .8 14 .5 3*, 7 D2 Deuterium (P = 0) 5 .9 9 .6 12 .6 15 .4 17 .9 20 .3 8 H2O Water (P = 0) 9 .8 13 .4 17 .3 21 .4 9 D2O Deuterium oxide (P = 0) 10 .2 13 .7 17 .8 22 .0 10 H2S Hydrogen sulfide 12 .5 16 .9 21 .2 25 .4 11 H3N Ammonia 10 .2 14 .0 17 .9 21 .7 12 He Helium (P = 0) 9 .6 15 .1 19 .9 24 .3 28 .3 32 .2 13 Kr Krypton (P = 0) 17 .4 25 .5 32 .9 39 .6 45 .8 14 NO Nitric oxide 13 .8 19 .2 23 .8 28 .0 31 .9 5 N2 Nitrogen 7 .0 12 .9 17 .9 22 .2 26 .1 29 .6 1, 15* N2O Nitrous -

Lecture 18 Ocean General Circulation Modeling
Lecture 18 Ocean General Circulation Modeling 9.1 The equations of motion: Navier-Stokes The governing equations for a real fluid are the Navier-Stokes equations (con servation of linear momentum and mass mass) along with conservation of salt, conservation of heat (the first law of thermodynamics) and an equation of state. However, these equations support fast acoustic modes and involve nonlinearities in many terms that makes solving them both difficult and ex pensive and particularly ill suited for long time scale calculations. Instead we make a series of approximations to simplify the Navier-Stokes equations to yield the “primitive equations” which are the basis of most general circu lations models. In a rotating frame of reference and in the absence of sources and sinks of mass or salt the Navier-Stokes equations are @ �~v + �~v~v + 2�~ �~v + g�kˆ + p = ~ρ (9.1) t r · ^ r r · @ � + �~v = 0 (9.2) t r · @ �S + �S~v = 0 (9.3) t r · 1 @t �ζ + �ζ~v = ω (9.4) r · cpS r · F � = �(ζ; S; p) (9.5) Where � is the fluid density, ~v is the velocity, p is the pressure, S is the salinity and ζ is the potential temperature which add up to seven dependent variables. 115 12.950 Atmospheric and Oceanic Modeling, Spring '04 116 The constants are �~ the rotation vector of the sphere, g the gravitational acceleration and cp the specific heat capacity at constant pressure. ~ρ is the stress tensor and ω are non-advective heat fluxes (such as heat exchange across the sea-surface).F 9.2 Acoustic modes Notice that there is no prognostic equation for pressure, p, but there are two equations for density, �; one prognostic and one diagnostic. -

Kinematics, Kinetics, Dynamics, Inertia Kinematics Is a Branch of Classical
Course: PGPathshala-Biophysics Paper 1:Foundations of Bio-Physics Module 22: Kinematics, kinetics, dynamics, inertia Kinematics is a branch of classical mechanics in physics in which one learns about the properties of motion such as position, velocity, acceleration, etc. of bodies or particles without considering the causes or the driving forces behindthem. Since in kinematics, we are interested in study of pure motion only, we generally ignore the dimensions, shapes or sizes of objects under study and hence treat them like point objects. On the other hand, kinetics deals with physics of the states of the system, causes of motion or the driving forces and reactions of the system. In a particular state, namely, the equilibrium state of the system under study, the systems can either be at rest or moving with a time-dependent velocity. The kinetics of the prior, i.e., of a system at rest is studied in statics. Similarly, the kinetics of the later, i.e., of a body moving with a velocity is called dynamics. Introduction Classical mechanics describes the area of physics most familiar to us that of the motion of macroscopic objects, from football to planets and car race to falling from space. NASCAR engineers are great fanatics of this branch of physics because they have to determine performance of cars before races. Geologists use kinematics, a subarea of classical mechanics, to study ‘tectonic-plate’ motion. Even medical researchers require this physics to map the blood flow through a patient when diagnosing partially closed artery. And so on. These are just a few of the examples which are more than enough to tell us about the importance of the science of motion. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Hamilton Description of Plasmas and Other Models of Matter: Structure and Applications I
Hamilton description of plasmas and other models of matter: structure and applications I P. J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas at Austin [email protected] http://www.ph.utexas.edu/ morrison/ ∼ MSRI August 20, 2018 Survey Hamiltonian systems that describe matter: particles, fluids, plasmas, e.g., magnetofluids, kinetic theories, . Hamilton description of plasmas and other models of matter: structure and applications I P. J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas at Austin [email protected] http://www.ph.utexas.edu/ morrison/ ∼ MSRI August 20, 2018 Survey Hamiltonian systems that describe matter: particles, fluids, plasmas, e.g., magnetofluids, kinetic theories, . \Hamiltonian systems .... are the basis of physics." M. Gutzwiller Coarse Outline William Rowan Hamilton (August 4, 1805 - September 2, 1865) I. Today: Finite-dimensional systems. Particles etc. ODEs II. Tomorrow: Infinite-dimensional systems. Hamiltonian field theories. PDEs Why Hamiltonian? Beauty, Teleology, . : Still a good reason! • 20th Century framework for physics: Fluids, Plasmas, etc. too. • Symmetries and Conservation Laws: energy-momentum . • Generality: do one problem do all. • ) Approximation: perturbation theory, averaging, . 1 function. • Stability: built-in principle, Lagrange-Dirichlet, δW ,.... • Beacon: -dim KAM theorem? Krein with Cont. Spec.? • 9 1 Numerical Methods: structure preserving algorithms: • symplectic, conservative, Poisson integrators, -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
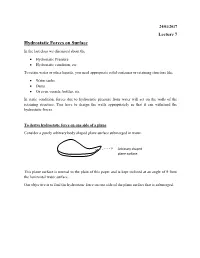
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics).