The Network Interface Between the Ygor Manager and the CCB Server
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Windows Command Prompt Cheatsheet
Windows Command Prompt Cheatsheet - Command line interface (as opposed to a GUI - graphical user interface) - Used to execute programs - Commands are small programs that do something useful - There are many commands already included with Windows, but we will use a few. - A filepath is where you are in the filesystem • C: is the C drive • C:\user\Documents is the Documents folder • C:\user\Documents\hello.c is a file in the Documents folder Command What it Does Usage dir Displays a list of a folder’s files dir (shows current folder) and subfolders dir myfolder cd Displays the name of the current cd filepath chdir directory or changes the current chdir filepath folder. cd .. (goes one directory up) md Creates a folder (directory) md folder-name mkdir mkdir folder-name rm Deletes a folder (directory) rm folder-name rmdir rmdir folder-name rm /s folder-name rmdir /s folder-name Note: if the folder isn’t empty, you must add the /s. copy Copies a file from one location to copy filepath-from filepath-to another move Moves file from one folder to move folder1\file.txt folder2\ another ren Changes the name of a file ren file1 file2 rename del Deletes one or more files del filename exit Exits batch script or current exit command control echo Used to display a message or to echo message turn off/on messages in batch scripts type Displays contents of a text file type myfile.txt fc Compares two files and displays fc file1 file2 the difference between them cls Clears the screen cls help Provides more details about help (lists all commands) DOS/Command Prompt help command commands Source: https://technet.microsoft.com/en-us/library/cc754340.aspx. -

The Linux Command Line
The Linux Command Line Fifth Internet Edition William Shotts A LinuxCommand.org Book Copyright ©2008-2019, William E. Shotts, Jr. This work is licensed under the Creative Commons Attribution-Noncommercial-No De- rivative Works 3.0 United States License. To view a copy of this license, visit the link above or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042. A version of this book is also available in printed form, published by No Starch Press. Copies may be purchased wherever fine books are sold. No Starch Press also offers elec- tronic formats for popular e-readers. They can be reached at: https://www.nostarch.com. Linux® is the registered trademark of Linus Torvalds. All other trademarks belong to their respective owners. This book is part of the LinuxCommand.org project, a site for Linux education and advo- cacy devoted to helping users of legacy operating systems migrate into the future. You may contact the LinuxCommand.org project at http://linuxcommand.org. Release History Version Date Description 19.01A January 28, 2019 Fifth Internet Edition (Corrected TOC) 19.01 January 17, 2019 Fifth Internet Edition. 17.10 October 19, 2017 Fourth Internet Edition. 16.07 July 28, 2016 Third Internet Edition. 13.07 July 6, 2013 Second Internet Edition. 09.12 December 14, 2009 First Internet Edition. Table of Contents Introduction....................................................................................................xvi Why Use the Command Line?......................................................................................xvi -

Useful Commands in Linux and Other Tools for Quality Control
Useful commands in Linux and other tools for quality control Ignacio Aguilar INIA Uruguay 05-2018 Unix Basic Commands pwd show working directory ls list files in working directory ll as before but with more information mkdir d make a directory d cd d change to directory d Copy and moving commands To copy file cp /home/user/is . To copy file directory cp –r /home/folder . to move file aa into bb in folder test mv aa ./test/bb To delete rm yy delete the file yy rm –r xx delete the folder xx Redirections & pipe Redirection useful to read/write from file !! aa < bb program aa reads from file bb blupf90 < in aa > bb program aa write in file bb blupf90 < in > log Redirections & pipe “|” similar to redirection but instead to write to a file, passes content as input to other command tee copy standard input to standard output and save in a file echo copy stream to standard output Example: program blupf90 reads name of parameter file and writes output in terminal and in file log echo par.b90 | blupf90 | tee blup.log Other popular commands head file print first 10 lines list file page-by-page tail file print last 10 lines less file list file line-by-line or page-by-page wc –l file count lines grep text file find lines that contains text cat file1 fiel2 concatenate files sort sort file cut cuts specific columns join join lines of two files on specific columns paste paste lines of two file expand replace TAB with spaces uniq retain unique lines on a sorted file head / tail $ head pedigree.txt 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 10 -
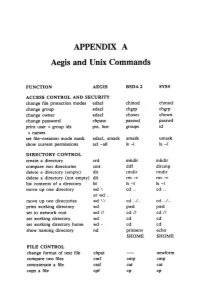
APPENDIX a Aegis and Unix Commands
APPENDIX A Aegis and Unix Commands FUNCTION AEGIS BSD4.2 SYSS ACCESS CONTROL AND SECURITY change file protection modes edacl chmod chmod change group edacl chgrp chgrp change owner edacl chown chown change password chpass passwd passwd print user + group ids pst, lusr groups id +names set file-creation mode mask edacl, umask umask umask show current permissions acl -all Is -I Is -I DIRECTORY CONTROL create a directory crd mkdir mkdir compare two directories cmt diff dircmp delete a directory (empty) dlt rmdir rmdir delete a directory (not empty) dlt rm -r rm -r list contents of a directory ld Is -I Is -I move up one directory wd \ cd .. cd .. or wd .. move up two directories wd \\ cd . ./ .. cd . ./ .. print working directory wd pwd pwd set to network root wd II cd II cd II set working directory wd cd cd set working directory home wd- cd cd show naming directory nd printenv echo $HOME $HOME FILE CONTROL change format of text file chpat newform compare two files emf cmp cmp concatenate a file catf cat cat copy a file cpf cp cp Using and Administering an Apollo Network 265 copy std input to std output tee tee tee + files create a (symbolic) link crl In -s In -s delete a file dlf rm rm maintain an archive a ref ar ar move a file mvf mv mv dump a file dmpf od od print checksum and block- salvol -a sum sum -count of file rename a file chn mv mv search a file for a pattern fpat grep grep search or reject lines cmsrf comm comm common to 2 sorted files translate characters tic tr tr SHELL SCRIPT TOOLS condition evaluation tools existf test test -
Introduction to Unix Shell
Introduction to Unix Shell François Serra, David Castillo, Marc A. Marti- Renom Genome Biology Group (CNAG) Structural Genomics Group (CRG) Run Store Programs Data Communicate Interact with each other with us The Unix Shell Introduction Interact with us Rewiring Telepathy Typewriter Speech WIMP The Unix Shell Introduction user logs in The Unix Shell Introduction user logs in user types command The Unix Shell Introduction user logs in user types command computer executes command and prints output The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command computer executes command and prints output The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command computer executes command and prints output ⋮ user logs off The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command computer executes command and prints output ⋮ user logs off The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command computer executes command and prints output ⋮ user logs off shell The Unix Shell Introduction user logs in user types command computer executes command and prints output user types another command computer executes command and prints output -

Lab Intro to Console Commands
New Lab Intro to KDE Terminal Konsole After completing this lab activity the student will be able to; Access the KDE Terminal Konsole and enter basic commands. Enter commands using a typical command line interface (CLI). Explain the use of the following commands, ls, ls –al, dir, mkdir, whoami, Explain the directory structure of a typical user. This lab activity will introduce you to one of the many command line interfaces available in Linux/UNIX operating systems and a few of the most basic commands. The command line interface you will be using for this lab activity is the console called the Konsole and is also referred to as Terminal. Note: As you notice, in the KDE system many features are written with the capital letter “K” in place of the first letter or the utility to reflect the fact it was modified for the KDE system. The original UNIX system did not use a graphical user interface GUI but rather was a command line interface (CLI) similar to the command prompt in Windows operating systems. The command line interface is referred to as a shell. Even today the command line interface (the shell) is used to issue commands on a Linux server to minimize system resources. For example, there is no need to start the GUI on the server to add a new user to an existing system. Starting the GUI will reduce the system performance because it requires RAM to run the GUI. A GUI will affect the overall performance of the server when it is supporting many users (clients). -

Command Reference Guide for Cisco Prime Infrastructure 3.9
Command Reference Guide for Cisco Prime Infrastructure 3.9 First Published: 2020-12-17 Americas Headquarters Cisco Systems, Inc. 170 West Tasman Drive San Jose, CA 95134-1706 USA http://www.cisco.com Tel: 408 526-4000 800 553-NETS (6387) Fax: 408 527-0883 THE SPECIFICATIONS AND INFORMATION REGARDING THE PRODUCTS IN THIS MANUAL ARE SUBJECT TO CHANGE WITHOUT NOTICE. ALL STATEMENTS, INFORMATION, AND RECOMMENDATIONS IN THIS MANUAL ARE BELIEVED TO BE ACCURATE BUT ARE PRESENTED WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED. USERS MUST TAKE FULL RESPONSIBILITY FOR THEIR APPLICATION OF ANY PRODUCTS. THE SOFTWARE LICENSE AND LIMITED WARRANTY FOR THE ACCOMPANYING PRODUCT ARE SET FORTH IN THE INFORMATION PACKET THAT SHIPPED WITH THE PRODUCT AND ARE INCORPORATED HEREIN BY THIS REFERENCE. IF YOU ARE UNABLE TO LOCATE THE SOFTWARE LICENSE OR LIMITED WARRANTY, CONTACT YOUR CISCO REPRESENTATIVE FOR A COPY. The Cisco implementation of TCP header compression is an adaptation of a program developed by the University of California, Berkeley (UCB) as part of UCB's public domain version of the UNIX operating system. All rights reserved. Copyright © 1981, Regents of the University of California. NOTWITHSTANDING ANY OTHER WARRANTY HEREIN, ALL DOCUMENT FILES AND SOFTWARE OF THESE SUPPLIERS ARE PROVIDED “AS IS" WITH ALL FAULTS. CISCO AND THE ABOVE-NAMED SUPPLIERS DISCLAIM ALL WARRANTIES, EXPRESSED OR IMPLIED, INCLUDING, WITHOUT LIMITATION, THOSE OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT OR ARISING FROM A COURSE OF DEALING, USAGE, OR TRADE PRACTICE. IN NO EVENT SHALL CISCO OR ITS SUPPLIERS BE LIABLE FOR ANY INDIRECT, SPECIAL, CONSEQUENTIAL, OR INCIDENTAL DAMAGES, INCLUDING, WITHOUT LIMITATION, LOST PROFITS OR LOSS OR DAMAGE TO DATA ARISING OUT OF THE USE OR INABILITY TO USE THIS MANUAL, EVEN IF CISCO OR ITS SUPPLIERS HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. -

Guide to Install Caffe on the Idiap Cluster Without Root Permissions
Guide to install Caffe on the idiap cluster without root permissions: Please, don’t copy and paste the commands (in italic letters) because it may be an error (a space, or a long dash, etc.) it is just better to type them manually and CHECK that makes sense to your environment. 0) Set environmental variables: export PATH=/idiap/home/$(whoami)/usr/bin/:$PATH export LD_LIBRARY_PATH=/idiap/home/$(whoami)/usr/lib/:$LD_LIBRARY_PATH 1) Install a virtual environment for Python virtualenv --system-site-packages -p /usr/bin/python2.7 caffe-py27 Note: Install everything while in the virtual environment: source caffe-py27/bin/activate Upgrade pup pip install --upgrade pip • Install some python libraries (I used this, but just install the required for you) pip install pandas pip install scipy pip install -U scikit-learn pip install Augmentor 2) Create a “usr” directory: mkdir /idiap/home/$(whoami)/usr 3) Install pre-requisites (download the packages in one folder and install in “usr” folder): • Boost curl -L -O http://sourceforge.net/projects/boost/files/boost/1.65.1/boost_1_65_1.tar.gz tar zxvf boost_1_65_1.tar.gz cd boost_1_65_1/ ./bootstrap.sh --libdir=/idiap/home/$(whoami)/usr/lib -- includedir=/idiap/home/$(whoami)/usr/include vi project-config.jam # check that the python paths correspond to your virtual environment ./b2 ./b2 install • Opencv (Note: if it is already installed, just skip this part) https://github.com/Itseez/opencv.git mkdir build cd build cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/idiap/home/$(whoami)/usr .. make make install cp /idiap/home/$(whoami)/usr/opencv-3.3.1/build/lib/cv2.so /idiap/home/$(whoami)/caffe- py27/lib/python2.7/site-packages/cv2.so • Protobuf git clone https://github.com/google/protobuf.git cd protobuf/ ./autogen.sh ./configure --prefix=/idiap/home/$(whoami)/usr make make install • glog git clone https://github.com/google/glog.git cd glog ./autogen.sh ./configure --prefix=/idiap/home/$(whoami)/usr make make install • gflags git clone https://github.com/gflags/gflags.git cd gflags mkdir build cd build ccmake . -
Bash Tutorial
Bash Shell Lecturer: Prof. Andrzej (AJ) Bieszczad Email: [email protected] Phone: 818-677-4954 Bash Shell The shell of Linux • Linux has a variety of different shells: – Bourne shell (sh), C shell (csh), Korn shell (ksh), TC shell (tcsh), Bour ne Again shell (bash). • Certainly the most popular shell is “bash”. Bash is an sh- compatible shell that incorporates useful features from the Korn shell (ksh) and C shell (csh). • It is intended to conform to the IEEE POSIX P1003.2/ISO 9945.2 Shell and Tools standard. • It offers functional improvements over sh for both programming and interactive use. Bash Shell Programming or Scripting ? • bash is not only an excellent command line shell, but a scripting language in itself. Shell scripting allows us to use the shell's abilities and to automate a lot of tasks that would otherwise require a lot of commands. • Difference between programming and scripting languages: – Programming languages are generally a lot more powerful and a lot faster than scriptin g languages. Programming languages generally start from source code and are compil ed into an executable. This executable is not easily ported into different operating syste ms. – A scripting language also starts from source code, but is not compiled into an executabl e. Rather, an interpreter reads the instructions in the source file and executes each inst ruction. Interpreted programs are generally slower than compiled programs. The main a dvantage is that you can easily port the source file to any operating system. bash is a s cripting language. Other examples of scripting languages are Perl, Lisp, and Tcl. -

Ubuntu Server Guide Basic Installation Preparing to Install
Ubuntu Server Guide Welcome to the Ubuntu Server Guide! This site includes information on using Ubuntu Server for the latest LTS release, Ubuntu 20.04 LTS (Focal Fossa). For an offline version as well as versions for previous releases see below. Improving the Documentation If you find any errors or have suggestions for improvements to pages, please use the link at thebottomof each topic titled: “Help improve this document in the forum.” This link will take you to the Server Discourse forum for the specific page you are viewing. There you can share your comments or let us know aboutbugs with any page. PDFs and Previous Releases Below are links to the previous Ubuntu Server release server guides as well as an offline copy of the current version of this site: Ubuntu 20.04 LTS (Focal Fossa): PDF Ubuntu 18.04 LTS (Bionic Beaver): Web and PDF Ubuntu 16.04 LTS (Xenial Xerus): Web and PDF Support There are a couple of different ways that the Ubuntu Server edition is supported: commercial support and community support. The main commercial support (and development funding) is available from Canonical, Ltd. They supply reasonably- priced support contracts on a per desktop or per-server basis. For more information see the Ubuntu Advantage page. Community support is also provided by dedicated individuals and companies that wish to make Ubuntu the best distribution possible. Support is provided through multiple mailing lists, IRC channels, forums, blogs, wikis, etc. The large amount of information available can be overwhelming, but a good search engine query can usually provide an answer to your questions. -

The Linux Command Line
The Linux Command Line Second Internet Edition William E. Shotts, Jr. A LinuxCommand.org Book Copyright ©2008-2013, William E. Shotts, Jr. This work is licensed under the Creative Commons Attribution-Noncommercial-No De- rivative Works 3.0 United States License. To view a copy of this license, visit the link above or send a letter to Creative Commons, 171 Second Street, Suite 300, San Fran- cisco, California, 94105, USA. Linux® is the registered trademark of Linus Torvalds. All other trademarks belong to their respective owners. This book is part of the LinuxCommand.org project, a site for Linux education and advo- cacy devoted to helping users of legacy operating systems migrate into the future. You may contact the LinuxCommand.org project at http://linuxcommand.org. This book is also available in printed form, published by No Starch Press and may be purchased wherever fine books are sold. No Starch Press also offers this book in elec- tronic formats for most popular e-readers: http://nostarch.com/tlcl.htm Release History Version Date Description 13.07 July 6, 2013 Second Internet Edition. 09.12 December 14, 2009 First Internet Edition. 09.11 November 19, 2009 Fourth draft with almost all reviewer feedback incorporated and edited through chapter 37. 09.10 October 3, 2009 Third draft with revised table formatting, partial application of reviewers feedback and edited through chapter 18. 09.08 August 12, 2009 Second draft incorporating the first editing pass. 09.07 July 18, 2009 Completed first draft. Table of Contents Introduction....................................................................................................xvi -
Introduction to UNIX Command Line
Introduction to UNIX Command Line ● Files and directories ● Some useful commands (echo, cat, grep, find, diff, tar) ● Redirection ● Pipes ● Variables ● Background processes ● Remote connections (e.g. ssh, wget) ● Scripts The Command Line ● What is it? ● An interface to UNIX ● You type commands, things happen ● Also referred to as a “shell” ● We'll use the bash shell – check you're using it by typing (you'll see what this means later): ● echo $SHELL ● If it doesn't say “bash”, then type bash to get into the bash shell Files and Directories / home var usr mcuser abenson drmentor science catvideos stuff data code report M51.fits simulate.c analyze.py report.tex Files and Directories ● Get a pre-made set of directories and files to work with ● We'll talk about what these commands do later ● The “$” is the command prompt (yours might differ). Type what's listed after hit, then press enter. $$ wgetwget http://bit.ly/1TXIZSJhttp://bit.ly/1TXIZSJ -O-O playground.tarplayground.tar $$ tartar xvfxvf playground.tarplayground.tar Files and directories $$ pwdpwd /home/abenson/home/abenson $$ cdcd playgroundplayground $$ pwdpwd /home/abenson/playground/home/abenson/playground $$ lsls animalsanimals documentsdocuments sciencescience $$ mkdirmkdir mystuffmystuff $$ lsls animalsanimals documentsdocuments mystuffmystuff sciencescience $$ cdcd animals/mammalsanimals/mammals $$ lsls badger.txtbadger.txt porcupine.txtporcupine.txt $$ lsls -l-l totaltotal 88 -rw-r--r--.-rw-r--r--. 11 abensonabenson abensonabenson 19441944 MayMay 3131 18:0318:03 badger.txtbadger.txt -rw-r--r--.-rw-r--r--. 11 abensonabenson abensonabenson 13471347 MayMay 3131 18:0518:05 porcupine.txtporcupine.txt Files and directories “Present Working Directory” $$ pwdpwd Shows the full path of your current /home/abenson/home/abenson location in the filesystem.