Disentangling Dense Multi-Cable Knots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shields, Grounds and Microphone Cables
Shields, grounds and microphone cables Shields, grounds and microphone cables By Bill Whitlock There is an old joke that the definition of a cable is “a source of potential trouble connecting two other sources of potential trouble” – that is worth chewing on. All signals accumulate noise as they flow through equipment and the connecting wires, and once noise has contaminated a signal it is essentially impossible to remove it without altering or degrading the original signal. For this reason no system can be quieter than its noisiest link. Noise and interference must be prevented from entering any part of the signal path, and the most vulnerable areas are usually the signal interfaces. The level of noise that is tolerable in an analogue pathway depends on many things but for a professional microphone – a primary signal Fig 1—The impedance of 3m (10ft) of 2.5 2mm (12#) copper wire source – most users would like it to be low enough to allow a dynamic range of >120dB. significant 0.015 Ω. In AC terms inductance will give This means that noise and interference the same wire an impedance of 30Ω at 1MHz. At components must be 120dB below the 25MHz it will become a radio antenna and look almost maximum undistorted signal capability of the like an open circuit. (Figure1) system. Microphones in professional use are almost in- Increasing the dimensions of the wire, even to variably connected using balanced cabling and ridiculous extents such as a 12mm solid copper rod so the many grave difficulties associated with will make remarkably little difference. -

X-Men/Avengers: Onslaught Vol
X-MEN/AVENGERS: ONSLAUGHT VOL. 2 PDF, EPUB, EBOOK Jeph Loeb | 448 pages | 29 Oct 2020 | Marvel Comics | 9781302923990 | English | New York, United States X-men/avengers: Onslaught Vol. 2 PDF Book In July during a revamp of the X-Men franchise, its title changed to New X-Men , featuring an ambigram logo issue X-Men: Legacy initially followed the Professor's presumed road to recovery as well as the encounters he faced, such as a battle with the mutant Exodus on the psychic plane [12] and discoveries about his past that include Mr. Comic book series. Log in Sign up. This was particularly unique during the late s when most X-Men titles frequently had story arcs that were several issues long. Iron Boy, Quicksilver, Black Panther and Hank Pym are making their way through the sewers looking for safety at the Wakanda embassy as the Sentinels continue to attack New York city above. This listing has ended. Cancel Update. Similar sponsored items Feedback on our suggestions - Similar sponsored items. And the goblin faces his greatest enemy - his self-esteem! To this end he got the assistance of Hellfire Club's leader Sebastian Shaw and Nate's old nemesis Holocaust , [12] however Holocaust was soon defeated. See details. It's the final battle that will change the landscape of the Marvel Universe! Onslaught's threat to the world became apparent when the heroes noticed that the creature used Franklin's powers to create a second sun that was drawing closer to the Earth, threatening to wipe out all life upon its approach. -
Affiliation List
AFFILIATIONS 08/12/21 AFFILIATION LIST Below you will find a list of all current affiliations cards and characters on them. As more characters are added to the game this list will be updated. A-FORCE • She-Hulk (k) • Blade • Angela • Cable • Black Cat • Captain Marvel • Black Widow • Deadpool • Black Widow, Agent of S.H.I.E.L.D. • Hawkeye • Captain Marvel • Hulk • Crystal • Iron Fist • Domino • Iron Man • Gamora • Luke Cage • Medusa • Quicksilver • Okoye • Scarlet Witch • Scarlet Witch • She-Hulk • Shuri • Thor, Prince of Asgard • Storm • Vision • Valkyrie • War Machine • Wasp • Wasp ASGARD • Wolverine BLACK ORDER • Thor, Prince of Asgard (k) • Angela • Thanos, The Mad Titan (k) • Enchantress • Black Dwarf • Hela, Queen of Hel • Corvus Glaive • Loki, God of Mischief • Ebony Maw • Valkyrie • Proxima Midnight AVENGERS BROTHERHOOD OF MUTANTS • Captain America (Steve Rogers) (k) • Magneto (k) • Captain America (Sam Wilson) (k) • Mystique (k) • Ant-Man • Juggernaut • Beast • Quicksilver • Black Panther • Sabretooth • Black Widow • Scarlet Witch • Black Widow, Agent of S.H.I.E.L.D. • Toad Atomic Mass Games and logo are TM of Atomic Mass Games. Atomic Mass Games, 1995 County Road B2 W, Roseville, MN, 55113, USA, 1-651-639-1905. © 2021 MARVEL Actual components may vary from those shown. CABAL DARK DIMENSION • Red Skull (k) • Dormammu (k) • Sin (k) DEFENDERS • Baron Zemo • Doctor Strange (k) • Bob, Agent of Hydra • Amazing Spider-Man • Bullseye • Blade • Cassandra Nova • Daredevil • Crossbones • Ghost Rider • Enchantress • Hawkeye • Killmonger • Hulk • Kingpin • Iron Fist • Loki, God of Mischief • Luke Cage • Magneto • Moon Knight • Mister Sinister • Scarlet Witch • M.O.D.O.K. • Spider-Man (Peter Parker) • Mysterio • Valkyrie • Mystique • Wolverine • Omega Red • Wong • Sabretooth GUARDIANS OF THE GALAXY • Ultron k • Viper • Star-Lord ( ) CRIMINAL SYNDICATE • Angela • Drax the Destroyer • Kingpin (k) • Gamora • Black Cat • Groot • Bullseye • Nebula • Crossbones • Rocket Raccoon • Green Goblin • Ronan the Accuser • Killmonger INHUMANS • Kraven the Hunter • M.O.D.O.K. -

Achievements Booklet
ACHIEVEMENTS BOOKLET This booklet lists a series of achievements players can pursue while they play Marvel United: X-Men using different combinations of Challenges, Heroes, and Villains. Challenge yourself and try to tick as many boxes as you can! Basic Achievements - Win without any Hero being KO’d with Heroic Challenge. - Win a game in Xavier Solo Mode. - Win without the Villain ever - Win a game with an Anti-Hero as a Hero. triggering an Overflow. - Win a game using only Anti-Heroes as Heroes. - Win before the 6th Master Plan card is played. - Win a game with 2 Players. - Win without using any Special Effect cards. - Win a game with 3 Players. - Win without any Hero taking damage. - Win a game with 4 Players. - Win without using any Action tokens. - Complete all Mission cards. - Complete all Mission cards with Moderate Challenge. - Complete all Mission cards with Hard Challenge. - Complete all Mission cards with Heroic Challenge. - Win without any Hero being KO’d. - Win without any Hero being KO’d with Moderate Challenge. - Win without any Hero being KO’d with Hard Challenge. MARVEL © Super Villain Feats Team vs Team Feats - Defeat the Super Villain with 2 Heroes. - Defeat the Villain using - Defeat the Super Villain with 3 Heroes. the Accelerated Villain Challenge. - Defeat the Super Villain with 4 Heroes. - Your team wins without the other team dealing a single damage to the Villain. - Defeat the Super Villain without using any Super Hero card. - Your team wins delivering the final blow to the Villain. - Defeat the Super Villain without using any Action tokens. -

Spider-Man: Into the Spider-Verse
SPIDER-MAN: INTO THE SPIDER-VERSE Screenplay by Phil Lord and Rodney Rothman Story by Phil Lord Dec. 3, 2018 SEQ. 0100 - THE ALTERNATE SPIDER-MAN “TAS” WE BEGIN ON A COMIC. The cover asks WHO IS SPIDER-MAN? SPIDER-MAN (V.O.) Alright, let’s do this one last time. My name is Peter Parker. QUICK CUTS of a BLOND PETER PARKER Pulling down his mask...a name tag that reads “Peter Parker”...various shots of Spider-Man IN ACTION. SPIDER-MAN (V.O.) I was bitten by a radioactive spider and for ten years I’ve been the one and only Spider-Man. I’m pretty sure you know the rest. UNCLE BEN tells Peter: UNCLE BEN (V.O.) With great power comes great responsibility. Uncle Ben walks into the beyond. SPIDER-MAN (V.O.) I saved a bunch of people, fell in love, saved the city, and then I saved the city again and again and again... Spiderman saves the city, kisses MJ, saves the city some more. The shots evoke ICONIC SPIDER-MAN IMAGES, but each one is subtly different, somehow altered. SPIDER-MAN (V.O.) And uh... I did this. Cut to Spider-Man dancing on the street, exactly like in the movie Spider-Man 3. SPIDER-MAN (V.O.) We don’t really talk about this. A THREE PANEL SPLIT SCREEN: shots of Spider-Man’s “products”: SPIDER-MAN (V.O.) Look, I’m a comic book, I’m a cereal, did a Christmas album. I have an excellent theme song. (MORE) 2. SPIDER-MAN (V.O.) (CONT'D) And a so-so popsicle. -

Untangling Dense Non-Planar Knots by Learning Manipulation Features and Recovery Policies
Robotics: Science and Systems 2021 Held Virtually, July 12–16, 2021 Untangling Dense Non-Planar Knots by Learning Manipulation Features and Recovery Policies Priya Sundaresan*1, Jennifer Grannen*1, Brijen Thananjeyan1, Ashwin Balakrishna1, Jeffrey Ichnowski1, Ellen Novoseller1, Minho Hwang1, Michael Laskey2, Joseph E. Gonzalez1, Ken Goldberg1 Abstract—Robot manipulation for untangling 1D deformable structures such as ropes, cables, and wires is challenging due to their infinite dimensional configuration space, complex dynamics, and tendency to self-occlude. Analytical controllers often fail in the presence of dense configurations, due to the difficulty of grasping between adjacent cable segments. We present two algorithms that enhance robust cable untangling, LOKI and SPi- DERMan, which operate alongside HULK, a high-level planner from prior work. LOKI uses a learned model of manipulation features to refine a coarse grasp keypoint prediction to a precise, optimized location and orientation, while SPiDERMan uses a learned model to sense task progress and apply recovery actions. We evaluate these algorithms in physical cable untangling experiments with 336 knots and over 1500 actions on real cables using the da Vinci surgical robot. We find that the combina- tion of HULK, LOKI, and SPiDERMan is able to untangle dense overhand, figure-eight, double-overhand, square, bowline, granny, stevedore, and triple-overhand knots. The composition of these methods successfully untangles a cable from a dense initial configuration in 68.3% of 60 physical experiments and achieves 50% higher success rates than baselines from prior work. Supplementary material, code, and videos can be found at https://tinyurl.com/rssuntangling. I. INTRODUCTION Robot manipulation of 1D deformable objects, such as cables, ropes, and wires, can facilitate automation of tasks in industrial, surgical, and household settings [9]. -

Avengers Vs. X-Men Free Energy, Food and Water to All Humanity As Well As Ending Armed Conflicts Around the Globe
FREE AVENGERS VS. X-MEN PDF Ed Brubaker,Matt Fraction,Brian Bendis | 384 pages | 04 Sep 2013 | Marvel Comics | 9780785163183 | English | New York, United States Avengers vs. X-Men (Event) | Marvel Database | Fandom Avengers vs. The event, consisting of an eponymous limited series and numerous tie-in books, involves the return of the Phoenix Force and the subsequent war between the Avengers and the X-Men. X-Men 0. X-Men also ties into the limited series AVX: VSdescribed as "the fight book" which expands upon many of the one-on-one battles featured in the main series, the digital series ; Avengers vs. The event was succeeded by the limited series AvX: Consequences. Despite receiving mixed reviews from critics, Avengers vs. X-Men was a commercial success that topped the comic-book sales charts for several months, from April to October The repercussions of the storyline resulted in the new status quos of the Marvel Universe Avengers Vs. X-Men in the company's Marvel NOW! In DecemberMarvel Comics announced the launch of Avengers vs. The series focuses on the return of the Phoenix Forcethe cosmic entity of death and rebirth, as it looks for its new host, believed to be the teenage mutant Hope Summerswho will possess all of its power. Cyclops and the other X-Men want to protect her and prepare her as if she's to be the mutant savior, while Captain America and the Avengers want her handed over to them so they can figure out what to do with her and keep the world safe from a potentially deadly fate. -

Marvel Comics Avengers Chronological Appearances by Bob Wolniak
Marvel Comics Avengers Chronological Appearances By Bob Wolniak ased initially on the Bob Fronczak list from Avengers Assemble and Avengers Forever websites. But unlike Mr. B Fronczak’s list (that stops about the time of Heroes Reborn) this is NOT an attempt at a Marvel continuity (harmony of Marvel titles in time within the fictional universe), but Avengers appearances in order in approx. real world release order . I define Avengers appearances as team appearances, not individual Avengers or even in some cases where several individual Avengers are together (but eventually a judgment call has to be made on some of those instances). I have included some non-Avengers appearances since they are important to a key storyline that does tie to the Avengers, but noted if they did not have a team appearance. Blue (purple for WCA & Ultimates) indicates an Avengers title , whether ongoing or limited series. I have decided that Force Works is not strictly an Avengers title, nor is Thunderbolts, Defenders or even Vision/Scarlet Witch mini- series, although each book correlates, crosses over and frequently contains guest appearances of the Avengers as a team. In those cases, the individual issues are listed. I have also decided that individual Avengers’ ongoing or limited series books are not Avengers team appearances, so I have no interest in the tedious tracking of every Captain America, Thor, Iron Man, or Hank Pym title unless they contain a team appearance or x-over . The same applies to Avengers Spotlight (largely a Hawkeye series, with other individual appearances), Captain Marvel, Ms. Marvel, Vision, Wonder Man, Hulk, She-Hulk, Black Panther, Quicksilver, Thunderstrike, War Machine, Black Widow, Sub-Mariner, Hercules, and other such books or limited series. -

New Mutants #87, 1St Cable Amazing Spider-Man
Batman Adventures #12, Detective Comics #359, 1st Harley Quinn 1st Batgirl (Barbara Gordon) New Mutants #98, Amazing Spider-Man #300, 1st Deadpool 1st Venom Incredible Hulk #1, Batman #181, 1st Hulk 1st Poison Ivy Incredible Hulk #181, NYX #3, 1st X-23 1st Wolverine (Wolverine’s Daughter) Amazing Fantasy #15, Star Wars #1, 1st Spider-Man Rare 35c Price Variant Amazing Spider-Man Action Comics #252, #129, 1st Supergirl Walking Dead #1, Brave and the Bold #28, 1st Rick Grimes 1st JLA Showcase #4, Fantastic Four #48, 1st Flash since Golden Age 1st Silver Surfer and Galactus Preacher #1, Giant-Size X-Men #1, 1st Jesse Custer Wolverine Joins the X-Men Iron Man #55, New Mutants #87, 1st Thanos 1st Cable Iron Fist #14, Strange Tales #110, 1st Sabre-Tooth 1st Doctor Strange Superman’s Pal Jimmy Olsen Tales of Suspense #39, #134, 1st Darkseid Cameo 1st Iron Man House of Secrets #92, Teenage Mutant Ninja Turtles 1st Swamp Thing #1, 1st Printing (Rare) Justice League of America (Saga of the) Swamp Thing #37, #1, 1st Solo Book 1st John Constantine (Hellblazer) Avengers #4, Daredevil #168, Captain America Revived 1st Elektra Captain Britain #8, 1st Betsy Flash #139, 1st Reverse Braddock, aka Psylocke Flash (Professor Zoom) Fantastic Four #52, Amazing Spider-Man #194, 1st Black Panther 1st Black Cat Tales to Astonish #27, Werewolf by Night #32, 1st Ant-Man 1st Moon Knight Marvel Premiere #15, Aquaman #35, 1st Iron Fist 1st Black Manta Tales of Suspense #52, Daredevil #1, 1st Black Widow (Marvel) 1st Matt Murdoch Batman #1 New 52, Night Nurse #1, 1st in New Series 1st Linda Carter All-Star Comics #58, Showcase #22, 1st 1st Power Girl Green Lantern (Hal Jordan) Amazing Spider-Man #50, Incredible Hulk #180, 1st Kingpin Brief 1st Wolverine Green Lantern #76, Detective Comics #140, 1st Neal Adams on Title 1st Riddler Hero for Hire #1, Captain America #117, 1st Luke Cage 1st Falcon Tales to Astonish #13, Amazing Spider-Man #101, 1st 1st Groot Morbius the Living Vampire Siege #3, Deadpool J. -

Cable/Deadpool Vol. 1: If Looks Could Kill
BIF2OBSTSBRE « eBook \ Cable/Deadpool Vol. 1: If Looks Could Kill Cable/Deadpool V ol. 1: If Looks Could Kill Filesize: 7.25 MB Reviews These types of publication is the best book available. it absolutely was writtern very completely and helpful. I am very happy to explain how here is the greatest book we have study within my individual existence and can be he greatest publication for possibly. (Lucas Brown) DISCLAIMER | DMCA 4JK58GIKTRYT \ Kindle // Cable/Deadpool Vol. 1: If Looks Could Kill CABLE/DEADPOOL VOL. 1: IF LOOKS COULD KILL Marvel, 2007. Condition: New. Mark Brooks; Patrick Zircher (illustrator). book. Read Cable/Deadpool Vol. 1: If Looks Could Kill Online Download PDF Cable/Deadpool Vol. 1: If Looks Could Kill PYMMFC20FQJF \\ PDF > Cable/Deadpool Vol. 1: If Looks Could Kill Oth er Books Klara the Cow Who Knows How to Bow (Fun Rhyming Picture Book/Bedtime Story with Farm Animals about Friendships, Being Special and Loved. Ages 2-8) (Friendship Series Book 1) Createspace, United States, 2015. Paperback. Book Condition: New. Apoorva Dingar (illustrator). Large Print. 214 x 149 mm. Language: English . Brand New Book ***** Print on Demand *****.Klara is a little different from the other... Read eBook » The Adventures of Sheriff Williker: /Book 1: The Case of the Missing Horseshoe Createspace, United States, 2014. Paperback. Book Condition: New. Kim Hansen (illustrator). large type edition. 216 x 216 mm. Language: English . Brand New Book ***** Print on Demand *****.A missing horseshoe for a prize winning... Read eBook » Diary of a Potion Maker (Book 1): The Potion Expert (an Unofficial Minecraft Book for Kids Ages 9 - 12 (Preteen) Createspace Independent Publishing Platform, United States, 2016. -
Deadpool & Cable: Ultimate Collection Book 1 Free
FREE DEADPOOL & CABLE: ULTIMATE COLLECTION BOOK 1 PDF Fabian Nicieza,Mark Brooks,Patrick Zircher,Shane Law,Chris Stevens | 424 pages | 10 Mar 2010 | Marvel Comics | 9780785143130 | English | New York, United States Deadpool & Cable Ultimate Collection - Book 1 - - Here at Walmart. Your email address will never be sold or distributed to a third party for any reason. Sorry, but we can't respond to individual comments. If you need immediate assistance, please contact Customer Care. Your feedback helps us make Walmart shopping better for millions of customers. Recent searches Clear All. Enter Location. Update location. Learn more. Report incorrect product information. Walmart Out of stock. Delivery not available. Pickup not available. Add to list. Add to registry. About This Item. We aim to show you accurate product information. Manufacturers, suppliers and others provide what you see here, and we have not verified it. See our disclaimer. Can two grown men armed to the teeth with deadly genetic weaponry live together without driving each other crazy? Deadpool & Cable: Ultimate Collection Book 1 a review See all reviews Write a review. Average Rating: 5. December 26, Verified purchase. Fun read. See more. Reviewed by Kaveman Kaveman. Ask a question Ask a question If you would like to share feedback with us about pricing, delivery or other customer service issues, please contact customer service directly. Your question required. Additional details. Send me an email when my question Deadpool & Cable: Ultimate Collection Book 1 answered. Please enter a valid email address. I agree to the Terms and Conditions. Cancel Submit. Pricing policy About our prices. -
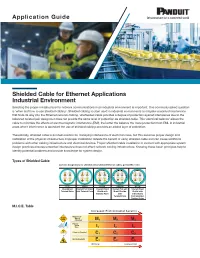
Shielded Cable for Ethernet Applications
Application Guide Shielded Cable for Ethernet Applications Industrial Environment Selecting the proper infrastructure for network communications in an industrial environment is important. One commonly asked question is ‘when and how to use shielded cabling’. Shielded cabling is often used in industrial environments to mitigate unwanted interference that finds its way into the Ethernet network cabling. Unshielded cable provides a degree of protection against interference due to the balanced twisted pair design but does not provide the same level of protection as shielded cable. This ‘electrical balance’ allows the cable to minimize the effects of electro-magnetic interference (EMI), the better the balance the more protection from EMI. In industrial areas where interference is abundant the use of shielded cabling provides an added layer of protection. Theoretically, shielded cable is an ideal solution for managing interference of electrical noise, but this assumes proper design and installation of the physical infrastructure. Improper installation defeats the benefit of using shielded cable and can cause additional problems with other cabling infrastructure and electrical devices. Proper shielded cable installation in concert with appropriate system design practices ensures unwanted interference does not affect network cabling infrastructure. Knowing these basic principles help to identify potential problems and provide knowledge for system design. Types of Shielded Cable M.I.C.E. Table Increased Environmental Severity Mechanical • Shock • Vibration M1 M2 M3 Ingress • Water • Dust I1 I2 I3 Climatic Chemical C1 C2 C3 Electromagnetic E1 E2 E3 O ffice Industrial Shielded Cable Applications The primary application for shielded cable is environments that contains electrical noise sources near communication cabling.