Evaluation of AXI-Interfaces for Hardware Software Communication
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
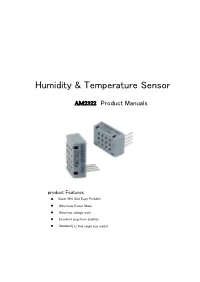
Humidity & Temperature Sensor
Humidity & Temperature Sensor AM2322 Product Manuals product Features Super Mini Size Easy Protable Ultra-Low Power State Ultra-low voltage work Excellent long-term stability StandardI2C And single bus output 一、 Product Overview AM2322 The digital temperature and humidity sensor is a kind of temperature and humidity composite sensor with the output of calibrated digitalsignal.The special temperature and humidity collection technology is adopted to ensure the high reliability and long-term stability of the product.The sensor includes a capacitive sensing element and a high-precision integrated temperature measurement element, which is connected to a high- performance microprocessor.The product has high quality, super fast response, strong anti-interference ability and high cost performance. AM2322 communication mode adopts single bus, standard I squared C communication mode.Standard single bus interface makes system integration easy and fast.The super small volume, extremely low power consumption, the signal transmission distance can reach up to 20 meters, making it the best choice for all kinds of Two kinds of communication mode is used directly output after applications and even the most demanding applications.The I temperature compensation, humidity, temperature and the CRC squared C communication mode adopts standard communication check and other digital information, users need to secondary timing, and the user can be directly attached to the I squared C calculation of digital output, also need not to compensate the communication bus, with no additional wiring and simple use. temperature humidity, accurate temperature and humidity information can be got.The two modes of communication are free to switch, users are free to choose, easy to use, and should be widely used.The product is 4 lead wire and convenient connection. -

IOTA: Detecting Erroneous I/O Behavior Via I/O Transaction Auditing
Appears in the First Workshop on Compiler and Architectural Techniques for Application Reliability and Security (CATARS) In Conjunction with the 2008 International Conference on Dependable Systems and Networks (DSN 2008) Anchorage, Alaska, June 2008 IOTA: Detecting Erroneous I/O Behavior via I/O Transaction Auditing Albert Meixner and Daniel J. Sorin Duke University [email protected], [email protected] Abstract nosed, the system could suggest that the user or system The correctness of the I/O system—and thus the administrator replace this device. If a driver bug is diag- nosed, the bug can be reported and the driver can be correctness of the computer—can be compromised by restarted (which is often sufficient). If a security breach hardware faults, driver bugs, and security breaches in is diagnosed, the system can shutdown the driver under downloaded device drivers. To detect erroneous I/O suspicion and alert the user. In this work, we focus on behavior, we have developed I/O Transaction Auditing error detection, rather than diagnosis and recovery. (IOTA), which checks the high-level behavior of I/O Our error detection mechanism, I/O Transaction transactions. In an IOTA-protected system, the operat- Auditing (IOTA), uses end-to-end checking [13] of I/O ing system creates a signature of the I/O transactions it transactions. We define a transaction as a high-level, expects to occur and every I/O device computes a signa- semantically atomic I/O operation, such as sending an ture of the transactions it actually performs. By compar- Ethernet frame. A transaction represents the basic I/O ing these signatures, IOTA can discover erroneous operation for higher level OS services such as the file behavior in both the hardware and the software respon- system or network stack. -
DESIGN of WISHBONE INTERFACED I2CMASTER CORE CONTROLLER USING VERILOG Ramesh Babu Dasara1, Y
DESIGN OF WISHBONE INTERFACED I2CMASTER CORE CONTROLLER USING VERILOG Ramesh Babu Dasara1, Y. Chandra Sekhar Reddy2 1Pursuing M.tech, 2Assistant Professor, from Nalanda Institute of Engineering and Technology (NIET), Siddharth Nagar, Kantepudi village, Sattenepalli Mandal, Guntur Dist.,A.P. (India) ABSTRACT In this paper we are implementing one of the serial communication protocol called Inter integrated circuit (I2C) master controller. The protocol is made of set of standards with the master and slave configuration to allow data transfer. The I2C master with wishbone controller is implemented in Verilog HDL. The modules are synthesized in Xilinx 13.2i. Then simulated to observe the operation of the Master controller and wishbone controller which performs high speed data transfer in presence of master or slave. This yields higher speed data transfer over the network. Keywords: Master,Wishbone, SDA,SCK,SLAVE I. INTRODUCTION In electronic world to make communication between any two digital hardware devices needs serial communication standards. There are several communication standards are RS232, RS435, and SPI to make high speed and low speed data transfer. To implement protocols actually we require more number of pin connections, whereas the size of IC gradually decreasing so we need a protocol that can have minimum number of pin connections. The protocols existed earlier are SPI, MOCROWIRE and USB needs point to point connection such that needs multiplexing of data and address. The proposed protocol requires only two lines two communicate with nay number of devices while other needs more number of pin connections. The I2c is best suited for medium range communication between the circuit boards within the equipment. -

Open Borders for System-On-A-Chip Buses: a Wire Format for Connecting Large Physics Controls
PHYSICAL REVIEW SPECIAL TOPICS - ACCELERATORS AND BEAMS 15, 082801 (2012) Open borders for system-on-a-chip buses: A wire format for connecting large physics controls M. Kreider,1,2 R. Ba¨r,1 D. Beck,1 W. Terpstra,1 J. Davies,2 V. Grout,2 J. Lewis,3 J. Serrano,3 and T. Wlostowski3 1GSI Helmholtz Centre for Heavy Ion Research, Darmstadt, Germany 2Glyndwˆ r University, Wrexham, United Kingdom 3CERN, Geneva, Switzerland (Received 27 January 2012; published 23 August 2012) System-on-a-chip (SoC) bus systems are typically confined on-chip and rely on higher level compo- nents to communicate with the outside world. The idea behind the EtherBone (EB) protocol is to extend the reach of the SoC bus to remote field-programmable gate arrays or processors. The EtherBone core implementation connects a Wishbone (WB) Ver. 4 Bus via a Gigabit Ethernet based network link to remote peripheral devices. EB acts as a transparent interconnect module towards attached WB Bus devices. EB was developed in the scope of the WhiteRabbit Timing Project at CERN and GSI/FAIR. WhiteRabbit will make use of EB as a means to issue commands to its timing nodes and control connected accelerator hardware. DOI: 10.1103/PhysRevSTAB.15.082801 PACS numbers: 84.40.Ua, 29.20.Àc, 07.05.Àt systems hosted inside a field-programmable gate array I. PURPOSE AND ENVIRONMENT (FPGA). EtherBone was named after these underlying This article builds on the paper by the title ‘‘EtherBone—A technologies, Ethernet and Wishbone. However, EB re- network Layer for the Wishbone SoC Bus’’ in the sides in the Open Systems Interconnection session layer ICALEPCS 2011 conference proceedings and aims to pro- (OSI layer 5) and does not depend on a specific choice of vide details on design choices and performance analysis for lower layer protocols in implementation. -

Tms320f28004x Microcontrollers Datasheet (Rev. F)
TMS320F280049, TMS320F280049C, TMS320F280048, TMS320F280048C, TMS320F280045, TMS320F280049, TMS320F280049C,TMS320F280041, TMS320F280041C, TMS320F280048, TMS320F280048C,TMS320F280040, TMS320F280040C TMS320F280045, www.ti.com TMS320F280041, TMS320F280041C,SPRS945F –TMS320F280040, JANUARY 2017 – REVISED TMS320F280040C FEBRUARY 2021 SPRS945F – JANUARY 2017 – REVISED FEBRUARY 2021 TMS320F28004x Microcontrollers 1 Features – Embedded Real-time Analysis and Diagnostic (ERAD) • TMS320C28x 32-bit CPU • Communications peripherals – 100 MHz – One Power-Management Bus (PMBus) – IEEE 754 single-precision Floating-Point Unit interface (FPU) – One Inter-integrated Circuit (I2C) interface – Trigonometric Math Unit (TMU) (pin-bootable) • 3×-cycle to 4×-cycle improvement for – Two Controller Area Network (CAN) bus ports common trigonometric functions versus (pin-bootable) software libraries – Two Serial Peripheral Interface (SPI) ports • 13-cycle Park transform (pin-bootable) – Viterbi/Complex Math Unit (VCU-I) – Two Serial Communication Interfaces (SCIs) – Ten hardware breakpoints (with ERAD) (pin-bootable) • Programmable Control Law Accelerator (CLA) – One Local Interconnect Network (LIN) – 100 MHz – One Fast Serial Interface (FSI) with a – IEEE 754 single-precision floating-point transmitter and receiver instructions • Analog system – Executes code independently of main CPU – Three 3.45-MSPS, 12-bit Analog-to-Digital • On-chip memory Converters (ADCs) – 256KB (128KW) of flash (ECC-protected) • Up to 21 external channels across two independent banks -

CP2725AC54TE Compact Power Line High Efficiency Rectifier 100-120/200-277VAC Input; Default Outputs: ±54VDC @ 2725W, 5VDC @ 4W
GE Data Sheet CP2725AC54TE Compact Power Line High Efficiency Rectifier 100-120/200-277VAC input; Default Outputs: ±54VDC @ 2725W, 5VDC @ 4W RoHS Compliant Features • Efficiency 96.2% • Compact 1RU form factor with 30 W/in3 density • Constant power from 52 – 58VDC • 2725W from nominal 200 – 277VAC • 1200W from nominal 100 – 120VAC • Output voltage programmable from 42V – 58VDC • PMBus compliant dual I2C and RS485 serial busses • Isolated +5V Aux, signals and I2C communications • Power factor correction (meets EN/IEC 61000-3-2 and EN 60555-2 requirements) Applications • Output overvoltage and overload protection • 48VDC distributed power architectures • AC Input overvoltage and undervoltage protection • Routers/Switches • Over-temperature warning and protection • VoIP/Soft Switches • Redundant, parallel operation with active load sharing • LAN/WAN/MAN applications • Remote ON/OFF • File servers • Internally controlled Variable-speed fan • Indoor wireless • Hot insertion/removal (hot plug) • Telecommunications equipment • Four front panel LED indicators • Enterprise Networks • UL* Recognized to UL60950-1, CAN/ CSA† C22.2 No. • SAN/NAS/iSCSI applications 60950-1, and VDE‡ 0805-1 Licensed to IEC60950-1 § • CE mark meets 2006/95/EC directive • RoHS Directive 2011/65/EU and amended Directive (EU) 2015/863 Description • Conformally coated option The CP2725AC54TE Rectifier provides significant efficiency improvements in the Compact Power Line platform of Rectifiers. High- density front-to-back airflow is designed for minimal space utilization and is highly expandable for future growth. The wide-input standard product is designed to be deployed internationally. It is configured with both RS485 and dual-redundant I2C communications busses that allow it to be used in a broad range of applications. -

UVM Based Reusable Verification IP for Wishbone Compliant SPI Master
UVM Based Reusable Verification IP for Wishbone Compliant SPI Master Core Lakhan Shiva Kamireddy∗, Lakhan Saiteja Ky ∗VLSI CAD Research Group, Department of Electrical and Computer Engineering, University of Colorado Boulder, CO 80303, USA, Email: [email protected] yDepartment of Electronics and Electrical Communication Engineering, Indian Institute of Technology Kharagpur West Bengal 721302, India, Email: [email protected] Abstract—The System on Chip design industry relies heavily ming, coverage analysis, constrained randomization and as- on functional verification to ensure that the designs are bug- sertion based VIP. A methodological approach for verification free. As design engineers are coming up with increasingly dense increases the efficiency and reduces the verification effort. In chips with much functionality, the functional verification field has advanced to provide modern verification techniques. In this paper, we use UVM, a System Verilog based methodology this paper, we present verification of a wishbone compliant for testing an SPI master core that is wishbone compliant. Serial Peripheral Interface (SPI) Master core using a System The paper is organized into the following sections: Section Verilog based standard verification methodology, the Universal II introduces the key features of SV and UVM environment. Verification Methodology (UVM). By making use of UVM factory In Section-III, we introduce the SPI Master IP core for pattern with parameterized classes, we have developed a robust and reusable verification IP. SPI is a full duplex communication which the UVM framework is developed. Section-IV presents protocol used to interface components most likely in embedded our approach towards the development of UVM based VIP. systems. We have verified an SPI Master IP core design that Simulation results with snapshots and a critical discussion of is wishbone compliant and compatible with SPI protocol and the limitations of the design are presented in Section-V. -

Wishbone Bus Architecture – a Survey and Comparison
International Journal of VLSI design & Communication Systems (VLSICS) Vol.3, No.2, April 2012 WISHBONE BUS ARCHITECTURE – A SURVEY AND COMPARISON Mohandeep Sharma 1 and Dilip Kumar 2 1Department of VLSI Design, Center for Development of Advanced Computing, Mohali, India [email protected] 2ACS - Division, Center for Development of Advanced Computing, Mohali, India [email protected] ABSTRACT The performance of an on-chip interconnection architecture used for communication between IP cores depends on the efficiency of its bus architecture. Any bus architecture having advantages of faster bus clock speed, extra data transfer cycle, improved bus width and throughput is highly desirable for a low cost, reduced time-to-market and efficient System-on-Chip (SoC). This paper presents a survey of WISHBONE bus architecture and its comparison with three other on-chip bus architectures viz. Advanced Microcontroller Bus Architecture (AMBA) by ARM, CoreConnect by IBM and Avalon by Altera. The WISHBONE Bus Architecture by Silicore Corporation appears to be gaining an upper edge over the other three bus architecture types because of its special performance parameters like the use of flexible arbitration scheme and additional data transfer cycle (Read-Modify-Write cycle). Moreover, its IP Cores are available free for use requiring neither any registration nor any agreement or license. KEYWORDS SoC buses, WISHBONE Bus, WISHBONE Interface 1. INTRODUCTION The introduction and advancement of multimillion-gate chips technology with new levels of integration in the form of the system-on-chip (SoC) design has brought a revolution in the modern electronics industry. With the evolution of shrinking process technologies and increasing design sizes [1], manufacturers are integrating increasing numbers of components on a chip. -
Intel® Agilex™ Device Data Sheet
Intel® Agilex™ Device Data Sheet Subscribe DS-1060 | 2021.06.02 Send Feedback Latest document on the web: PDF | HTML Contents Contents Intel® Agilex™ Device Data Sheet............................................................................................................................................... 3 Electrical Characteristics...................................................................................................................................................... 5 Operating Conditions..................................................................................................................................................5 Switching Characteristics....................................................................................................................................................27 Core Performance Specifications.................................................................................................................................28 Periphery Performance Specifications.......................................................................................................................... 37 E-Tile Transceiver Performance Specifications...............................................................................................................46 P-Tile Transceiver Performance Specifications...............................................................................................................50 R-Tile Transceiver Performance Specifications...............................................................................................................55 -

Table of Contents
Table of Contents Chapter 1 Bus Decode -------------------------------------------------------------- 1 Basic operation --------------------------------------------------------------------------------------------- 1 Add a Bus Decode ----------------------------------------------------------------------------------------------------- 1 Advance channel setting ---------------------------------------------------------------------------------------------- 2 Specially Bus Decode: ------------------------------------------------------------------------------------------------ 4 1-Wire ------------------------------------------------------------------------------------------------------------------- 7 3-Wire ------------------------------------------------------------------------------------------------------------------- 9 7-Segment -------------------------------------------------------------------------------------------------------------- 11 A/D Converter--------------------------------------------------------------------------------------------------------- 14 AcceleroMeter -------------------------------------------------------------------------------------------------------- 17 AD-Mux Flash -------------------------------------------------------------------------------------------------------- 19 Advanced Platform Management Link (APML) ---------------------------------------------------------------- 21 BiSS-C------------------------------------------------------------------------------------------------------------------ 23 BSD --------------------------------------------------------------------------------------------------------------------- -

The PET750-12-050 Is a 759 Watts, 1U Form Factor Power Supply Module with Active PFC (Power Factor Correction)
The PET750-12-050 is a 759 Watts, 1U form factor power supply module with Active PFC (Power Factor Correction). It converts standard AC mains power into a main output of 12V for powering intermediate bus architectures (IBA) in high performance and reliability servers, routers, and network switches. The PET750-12-050 meets international safety standards and displays the CE-Mark for the European Low Voltage Directive (LVD). • Best-in-Class, 80 PLUS Certified “Platinum” Efficiency • Wide Input Voltage Range 90-264 VAC • AC Input with Power Factor Correction • Always-On 15 W Standby Output (5 V/3 A) • Hot-Plug Capability • Parallel Operation with Active Current Sharing • DC-DC Digital Controls for Improved Performance • High Density Design 20.5 W/in3 • Small Form Factor 300 x 50.5 x 40 mm (11.81 x 1.99 x 1.57 in) • Power Management Bus Communications Protocol for Control, Programming and Monitoring • Over Temperature, Output Over Voltage and Over Current Protection • One DC OK Signaling Status LED • Networking Switches • High Performance Servers • Routers 2 PET750-12-050xA PET 750 - 12 - 050 x A Product Family Power Level Dash V1 Output Dash Width Airflow Input N: Normal PET Front-Ends 750 W 12 V 50 mm A: AC R: Reverse OUTPUT MAX LOAD MAX LOAD MINIMUM RIPPLE & TOTAL MODEL CONNECTOR VOLTAGE CONVECTION 1 300 LFM 1,2 LOAD NOISE 3 REGULATION PET750-12-050NA 12 VDC 62 A 62 A 0 A 1% Card edger ± 2.5% PET750-12-050RA 12 VDC 62 A 62 A 0 A 1% Card edger ± 2.5% The PET750-12-050 AC-DC power supply is a mainly DSP controlled, highly efficient front-end. -

Copyright by Iat Pui Chan Master of Science in Engineering December 2009
Copyright by Iat Pui Chan Master of Science in Engineering December 2009 The Report Committee for Iat Pui Chan Certifies that this is the approved version of the following report: USB 2.0 ULPI Design APPROVED BY SUPERVISING COMMITTEE: Supervisor: Jacob Abraham Mark McDermott USB2.0 ULPI Design by Iat Pui Chan, BSEE Report Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Master of Science in Engineering The University of Texas at Austin December 2009 Abstract USB2.0 ULPI Design Iat Pui Chan, MSE The University of Texas at Austin, Fall 2009 Supervisor: Jacob Abraham This report outlines an implementation of an USB 2.0 ULPI LINK design. Chapter 1 presents an overview of the design and hardware required in the project. Chapter 2 presents how the design functions in an USB system. Chapter 3 describes the hardware implementation. Simulation result and synthesis result are shown in Chapter 4 and 5. iv Table of Contents List of Tables ........................................................................................................ vii List of Figures...................................................................................................... viii List of Figures...................................................................................................... viii Chapter 1: Introduction...........................................................................................1 1.1 System Overview......................................................................................1