Hydrodynamics and Morphodynamics in the Swash Zone: Hydralab Iii Large-Scale Experiments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

INTERTIDAL ZONATION Introduction to Oceanography Spring 2017 The
INTERTIDAL ZONATION Introduction to Oceanography Spring 2017 The Intertidal Zone is the narrow belt along the shoreline lying between the lowest and highest tide marks. The intertidal or littoral zone is subdivided broadly into four vertical zones based on the amount of time the zone is submerged. From highest to lowest, they are Supratidal or Spray Zone Upper Intertidal submergence time Middle Intertidal Littoral Zone influenced by tides Lower Intertidal Subtidal Sublittoral Zone permanently submerged The intertidal zone may also be subdivided on the basis of the vertical distribution of the species that dominate a particular zone. However, zone divisions should, in most cases, be regarded as approximate! No single system of subdivision gives perfectly consistent results everywhere. Please refer to the intertidal zonation scheme given in the attached table (last page). Zonal Distribution of organisms is controlled by PHYSICAL factors (which set the UPPER limit of each zone): 1) tidal range 2) wave exposure or the degree of sheltering from surf 3) type of substrate, e.g., sand, cobble, rock 4) relative time exposed to air (controls overheating, desiccation, and salinity changes). BIOLOGICAL factors (which set the LOWER limit of each zone): 1) predation 2) competition for space 3) adaptation to biological or physical factors of the environment Species dominance patterns change abruptly in response to physical and/or biological factors. For example, tide pools provide permanently submerged areas in higher tidal zones; overhangs provide shaded areas of lower temperature; protected crevices provide permanently moist areas. Such subhabitats within a zone can contain quite different organisms from those typical for the zone. -
Beach Nourishment: Massdep's Guide to Best Management Practices for Projects in Massachusetts
BBEACHEACH NNOURISHMEOURISHMENNTT MassDEP’sMassDEP’s GuideGuide toto BestBest ManagementManagement PracticesPractices forfor ProjectsProjects inin MassachusettsMassachusetts March 2007 acknowledgements LEAD AUTHORS: Rebecca Haney (Coastal Zone Management), Liz Kouloheras, (MassDEP), Vin Malkoski (Mass. Division of Marine Fisheries), Jim Mahala (MassDEP) and Yvonne Unger (MassDEP) CONTRIBUTORS: From MassDEP: Fred Civian, Jen D’Urso, Glenn Haas, Lealdon Langley, Hilary Schwarzenbach and Jim Sprague. From Coastal Zone Management: Bob Boeri, Mark Borrelli, David Janik, Julia Knisel and Wendolyn Quigley. Engineering consultants from Applied Coastal Research and Engineering Inc. also reviewed the document for technical accuracy. Lead Editor: David Noonan (MassDEP) Design and Layout: Sandra Rabb (MassDEP) Photography: Sandra Rabb (MassDEP) unless otherwise noted. Massachusetts Massachusetts Office Department of of Coastal Zone Environmental Protection Management 1 Winter Street 251 Causeway Street Boston, MA Boston, MA table of contents I. Glossary of Terms 1 II. Summary 3 II. Overview 6 • Purpose 6 • Beach Nourishment 6 • Specifications and Best Management Practices 7 • Permit Requirements and Timelines 8 III. Technical Attachments A. Beach Stability Determination 13 B. Receiving Beach Characterization 17 C. Source Material Characterization 21 D. Sample Problem: Beach and Borrow Site Sediment Analysis to Determine Stability of Nourishment Material for Shore Protection 22 E. Generic Beach Monitoring Plan 27 F. Sample Easement 29 G. References 31 GLOSSARY Accretion - the gradual addition of land by deposition of water-borne sediment. Beach Fill – also called “artificial nourishment”, “beach nourishment”, “replenishment”, and “restoration,” comprises the placement of sediment within the nearshore sediment transport system (see littoral zone). (paraphrased from Dean, 2002) Beach Profile – the cross-sectional shape of a beach plotted perpendicular to the shoreline. -

Appendix 1 : Marine Habitat Types Definitions. Update Of
Appendix 1 Marine Habitat types definitions. Update of “Interpretation Manual of European Union Habitats” COASTAL AND HALOPHYTIC HABITATS Open sea and tidal areas 1110 Sandbanks which are slightly covered by sea water all the time PAL.CLASS.: 11.125, 11.22, 11.31 1. Definition: Sandbanks are elevated, elongated, rounded or irregular topographic features, permanently submerged and predominantly surrounded by deeper water. They consist mainly of sandy sediments, but larger grain sizes, including boulders and cobbles, or smaller grain sizes including mud may also be present on a sandbank. Banks where sandy sediments occur in a layer over hard substrata are classed as sandbanks if the associated biota are dependent on the sand rather than on the underlying hard substrata. “Slightly covered by sea water all the time” means that above a sandbank the water depth is seldom more than 20 m below chart datum. Sandbanks can, however, extend beneath 20 m below chart datum. It can, therefore, be appropriate to include in designations such areas where they are part of the feature and host its biological assemblages. 2. Characteristic animal and plant species 2.1. Vegetation: North Atlantic including North Sea: Zostera sp., free living species of the Corallinaceae family. On many sandbanks macrophytes do not occur. Central Atlantic Islands (Macaronesian Islands): Cymodocea nodosa and Zostera noltii. On many sandbanks free living species of Corallinaceae are conspicuous elements of biotic assemblages, with relevant role as feeding and nursery grounds for invertebrates and fish. On many sandbanks macrophytes do not occur. Baltic Sea: Zostera sp., Potamogeton spp., Ruppia spp., Tolypella nidifica, Zannichellia spp., carophytes. -

Biological Oceanography - Legendre, Louis and Rassoulzadegan, Fereidoun
OCEANOGRAPHY – Vol.II - Biological Oceanography - Legendre, Louis and Rassoulzadegan, Fereidoun BIOLOGICAL OCEANOGRAPHY Legendre, Louis and Rassoulzadegan, Fereidoun Laboratoire d'Océanographie de Villefranche, France. Keywords: Algae, allochthonous nutrient, aphotic zone, autochthonous nutrient, Auxotrophs, bacteria, bacterioplankton, benthos, carbon dioxide, carnivory, chelator, chemoautotrophs, ciliates, coastal eutrophication, coccolithophores, convection, crustaceans, cyanobacteria, detritus, diatoms, dinoflagellates, disphotic zone, dissolved organic carbon (DOC), dissolved organic matter (DOM), ecosystem, eukaryotes, euphotic zone, eutrophic, excretion, exoenzymes, exudation, fecal pellet, femtoplankton, fish, fish lavae, flagellates, food web, foraminifers, fungi, harmful algal blooms (HABs), herbivorous food web, herbivory, heterotrophs, holoplankton, ichthyoplankton, irradiance, labile, large planktonic microphages, lysis, macroplankton, marine snow, megaplankton, meroplankton, mesoplankton, metazoan, metazooplankton, microbial food web, microbial loop, microheterotrophs, microplankton, mixotrophs, mollusks, multivorous food web, mutualism, mycoplankton, nanoplankton, nekton, net community production (NCP), neuston, new production, nutrient limitation, nutrient (macro-, micro-, inorganic, organic), oligotrophic, omnivory, osmotrophs, particulate organic carbon (POC), particulate organic matter (POM), pelagic, phagocytosis, phagotrophs, photoautotorphs, photosynthesis, phytoplankton, phytoplankton bloom, picoplankton, plankton, -
Life in the Intertidal Zone
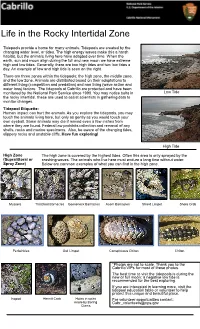
Life in the Rocky Intertidal Zone Tidepools provide a home for many animals. Tidepools are created by the changing water level, or tides. The high energy waves make this a harsh habitat, but the animals living here have adapted over time. When the earth, sun and moon align during the full and new moon we have extreme high and low tides. Generally, there are two high tides and two low tides a day. An example of low and high tide is seen on the right. There are three zones within the tidepools: the high zone, the middle zone, and the low zone. Animals are distributed based on their adaptations to different living (competition and predation) and non living (wave action and water loss) factors. The tidepools at Cabrillo are protected and have been monitored by the National Park Service since 1990. You may notice bolts in Low Tide the rocky intertidal, these are used to assist scientists in gathering data to monitor changes. Tidepool Etiquette: Human impact can hurt the animals. As you explore the tidepools, you may touch the animals living here, but only as gently as you would touch your own eyeball. Some animals may die if moved even a few inches from where they are found. Federal law prohibits collection and removal of any shells, rocks and marine specimens. Also, be aware of the changing tides, slippery rocks and unstable cliffs. Have fun exploring! High Tide High Zone The high zone is covered by the highest tides. Often this area is only sprayed by the (Supralittoral or crashing waves. -

Sarcodina: Benthic Foraminifera
NOAA Technical Report NMFS Circular 439 Marine Flora and Fauna of the Northeastern United States. Protozoa: Sarcodina: Benthic Foraminifera Ruth Todd and Doris Low June 1981 U.S. DEPARTMENT OF COMMERCE Malcolm Baldrige, Secretary National Oceanic and Atmospheric Administration National Marine Fisheries Service Terry L. Leitzell, Assistant Administrator for Fisheries FOREWORD This NMFS Circular is part of the subseries "Marine Flora and Fauna of the Northeastern United States:' which consists of original, illustrated, modern manuals on the identification, classification, and general biology of the estuarine and coastal marine plants and animals of the northeastern United States. The manuals are published at irregular intervals on as many taxa of the region as there are specialists available to collaborate in their preparation. Geographic coverage of the "Marine Flora and Fauna of the Northeastern United States" is planned to include organisms from the headwaters of estuaries seaward to approximately the 200 m depth on the continental shelf from Maine to Virginia, but may vary somewhat with each major taxon and the interests ofcollaborators. Whenever possible representative specimens dealt with in the manuals are deposited in the reference collections of major museums of the region. The "Marine Flora and Fauna of the Northeastern United States" is being prepared in col laboration with systematic specialists in the United States and abroad. Each manual is based primari lyon recent and ongoing revisionary systematic research and a fresh examination of the plants and animals. Each major taxon, treated in a separate manual, includes an introduction, illustrated glossary, uniform originally illustrated keys, annotated checklist with infonnation when available on distribution, habitat, life history, and related biology, references to the major literature of the group, and a systematic index. -

Lesson Plan – Ocean in Motion
Lesson Plan – Ocean in Motion Summary This lesson will introduce students to how the ocean is divided into different zones, the physical characteristics of these zones, and how water moves around the earths ocean basin. Students will also be introduced to organisms with adaptations to survive in various ocean zones. Content Area Physical Oceanography, Life Science Grade Level 5-8 Key Concept(s) • The ocean consists of different zones in much the same way terrestrial ecosystems are classified into different biomes. • Water moves and circulates throughout the ocean basins by means of surface currents, upwelling, and thermohaline circualtion. • Ocean zones have distinguishing physical characteristics and organisms/ animals have adaptations to survive in different ocean zones. Lesson Plan – Ocean in Motion Objectives Students will be able to: • Describe the different zones in the ocean based on features such as light, depth, and distance from shore. • Understand how water is moved around the ocean via surface currents and deep water circulation. • Explain how some organisms are adapted to survive in different zones of the ocean. Resources GCOOS Model Forecasts Various maps showing Gulf of Mexico surface current velocity (great teaching graphic also showing circulation and gyres in Gulf of Mexico), surface current forecasts, and wind driven current forecasts. http://gcoos.org/products/index.php/model-forecasts/ GCOOS Recent Observations Gulf of Mexico map with data points showing water temperature, currents, salinity and more! http://data.gcoos.org/fullView.php Lesson Plan – Ocean in Motion National Science Education Standard or Ocean Literacy Learning Goals Essential Principle Unifying Concepts and Processes Models are tentative schemes or structures that 2. -

Beach Nourishment Profile Equilibration: What to Expect After Sand Is Placed on a Beach By
ASBPA WHITE PAPER: Beach nourishment profile equilibration: What to expect after sand is placed on a beach By Kenneth Willson, Gordon Thomson, Tiffany Roberts Briggs, Nicole Elko, and Jon Miller ASBPA Science & Technology Committee March 2017 each nourishment is a commonly implemented solution to mitigate long-term erosion, provide habi- tat,B and reduce storm-damage to coastal communities. During a beach nourish- ment project, large volumes of sand (with similar properties as the native sand) are added to the beach from upland, offshore, or nearby inlet sources to establish a de- signed level of protection and/or restore sand that has eroded. During the construction of a beach nourishment project, sand is brought to the beach by dredges or truck hauling to Figure 1. Diagram showing the basic features of a beach profile typical of widen the beach. Bulldozers are then used many U.S. beaches. to grade the sand into a pre-determined refers to the typically dry area between the natural processes by including a vol- construction template. Nourishment the (high) water level and dune/upland ume of sand intended to be transported projects are designed and constructed region. Seaward of the beach is the surf offshore (Figure 2). to take advantage of the natural forces, zone, extending beyond the region where The constructed beach nourishment such as waves and currents, to move sand waves break. The dune, beach, surf zone, project includes a total volume of sand, offshore. This process results in a natural and dune comprise the beach profile “constructed fill,” which consists of sloping beach within the littoral zone, and (Figure 1). -

Waves and Sediment Transport in the Nearshore Zone - R.G.D
COASTAL ZONES AND ESTUARIES – Waves and Sediment Transport in the Nearshore Zone - R.G.D. Davidson-Arnott, B. Greenwood WAVES AND SEDIMENT TRANSPORT IN THE NEARSHORE ZONE R.G.D. Davidson-Arnott Department of Geography, University of Guelph, Canada B. Greenwood Department of Geography, University of Toronto, Canada Keywords: wave shoaling, wave breaking, surf zone, currents, sediment transport Contents 1. Introduction 2. Definition of the nearshore zone 3. Wave shoaling 4. The surf zone 4.1. Wave breaking 4.2. Surf zone circulation 5. Sediment transport 5.1. Shore-normal transport 5.2. Longshore transport 6. Conclusions Glossary Bibliography Biographical Sketches Summary The nearshore zone extends from the low tide line out to a water depth where wave motion ceases to affect the sea floor. As waves travel from the outer limits of the nearshore zone towards the shore they are increasingly affected by the bed through the process of wave shoaling and eventually wave breaking. In turn, as water depth decreases wave motion and sediment transport at the bed increases. In addition to the orbital motion associated with the waves, wave breaking generates strong unidirectional currents UNESCOwithin the surf zone close to the – beach EOLSS and this is responsible for the transport of sediment both on-offshore and alongshore. SAMPLE CHAPTERS 1. Introduction The nearshore zone extends from the limit of the beach exposed at low tides seaward to a water depth at which wave action during storms ceases to appreciably affect the bottom. On steeply sloping coasts the nearshore zone may be less than 100 m wide and on some gently sloping coasts it may extend offshore for more than 5 km - however, on many coasts the nearshore zone is 0.5-2.5 km in width and extends into water depths >40m. -
Laurentian Great Lakes, Interaction of Coastal and Offshore Waters Introduction
1Encyclopedia of Earth Sciences Series IEncyclopedia of Lakes and Reservoirs ISpringer Science+Business Media B.V. 2012 110.1007/978-1-4020-4410-6_264 ILars Bengtsson, Reginald W. Herschyand Rhodes W. Fairbridge Laurentian Great Lakes, Interaction of Coastal and Offshore Waters 1 21S3 Yerubandi R. Rao IS3 and David J. Schwab (1) Environment Canada, National Water Research Institute, Canada Center for Inland Waters, 867 Lakeshore Road, Burlington, ON, Canada (2) Great Lakes Environmental Research Laboratory, 2205 Commonwealth Blvd, Ann Arbor, MI 48105, USA IS::l Yerubandi R. Rao (Corresponding author) Email: [email protected] [;] David J. Schwab Email: [email protected] Without Abstract Introduction The Laurentian Great Lakes represent an extensive, interconnected aquatic system dominated by its coastal nature. While the lakes are large enough to be significantly influenced by the earth's rotation, they are at the same time closed basins to be strongly influenced by coastal processes (Csanady, 1984). Nowhere is an understanding of how physical, geological, chemical, and biological processes interact in a coastal system more important to a body of water than the Great Lakes. Several factors combine to create complex hydrodynamics in coastal systems, and the associated physical transport and dispersal processes of the resulting coastal flow field are equally complex. Physical transport processes are often the dominant factor in mediating geochemical and biological processes in the coastal environment. Thus, it is critically important to have a thorough understanding of the coastal physical processes responsible for the distribution of chemical and biological species in this zone. However, the coastal regions are not isolated but are coupled with mid-lake waters by exchanges involving transport of materials, momentum, and energy. -

Littoral Zones What Are They and What Do They Do? Martin County’S
Littoral Zones What are they and what do they do? Martin County’s The shallow down-sloping shelf of a lake or pond is commonly referred to as the lake’s “littoral zone”. The zone is an area where Littoral the water meets the land. Plants here support MARTIN COUNTY wildlife such as wading birds, turtles and crabs. Board of County Commissioners 2401 S.E. Monterey Road Zones Stuart, Florida 34996-3397 Doug Smith, District 1 Dennis H. Armstrong, District 2 Lee Weberman, District 3 Elmira R. Gainey, District 4 Michael DiTerlizzi, District 5 Russ Blackburn, County Administrator Turtles spend hours basking in the sun. Littoral Zones are crucial components of healthy ecosystems, hence are protected by law. A primary function of a planted littoral This brochure provides you with What are they zone is to absorb pollutants from water that some interesting facts about the and what do they do? ultimately drain into our canals and rivers, Littoral Zones of Martin County, particularly water generated from storms. Littoral zone vegetation also prevents shoreline Florida. erosion. Since 1985, Martin County has required that a percentage of each lake, pond, or stormwater retention pond be established as a littoral zone. Littoral Zones provide Well functioning littoral areas are aesthetically food and shelter for pleasing, add habitat for wildlife and increase waterbirds and other animals. property values. Environmental Division A Growth Management Department Publication www.martin.fl.us Index No. gme02s.001 Examples of Marsh and Littoral Shelf Plantings Healthy lakes are good lakes A balanced, healthy lake will easily support healthy plants and wildlife. -

A Littoral Survey in Lake Tanganyika: Spatiotemporal Variations in Nutrient
A littoral survey in Lake Tanganyika: to collect 3.0 L of water from 1 m depth approximately 10 m spatiotemporal variations in nutrient offshore. 2.0 L were collected for phytoplankton biomass in rinsed Uhai bottles and 1.0 L was collected to test turbidity and concentrations, phytoplankton biomass and - nutrient concentrations (silica, phosphorous, NH4-N, and NO3 ) bathymetry near the Kigoma Region in rinsed HDPE bottles. The Uhai bottles were stored out of direct sunlight in an action packer and the HDPE bottles were Student: Jessica Corman stored on ice until return to the lab. Mentor: Peter McIntyre In the laboratory, phytoplankton were collected by filtration Introduction through a Gelman A/E 47mm glass fiber filter. The filter was placed in a glass culture tube with 8 mL of buffered 90% ethanol Nutrient cycling in Lake Tanganyika is influenced by the tilting for 24 hours to extract chlorophyll a (Nusch 1980). Chlorophyll of the thermocline (Coulter 1991). Prevailing southeast winds was measured using a Turner Aquafluor fluorometer. during the four month dry season (May through September) cause the thermocline to rise in the south bringing nutrient For chemical analyses, samples were filtered through a rich waters from depth to the surface at the southern end of the syringe-mounted Gelman A/E 25 mm filter. Concentrations lake (Coulter 1991). However, related upwelling events also of silica, soluble reactive phosphorous (SRP), and nitrate (NO -) were determined using the HACH Heteropoly Blue occur in the north, bringing silica, phosphorous and nitrogen 3 rich waters into the epilimnion in the pelagic zone (O’Reilly et Rapid Liquid Method, Ascorbic Acid Rapid Liquid Method, al.