Functional Allocation and Door Control of ATO for the Korean Radio-Based Train Control System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Platform Screen Systemssystems
09.2014 P-1210-EN RAIL VEHICLE PLATFORM SCREEN SYSTEMSSYSTEMS RAILSERVICES CONTINUED RESEARCH Through its specialist RailServices division, AND DEVELOPMENT WPSD has the ability to maintain, service In addition to the core platform screen and upgrade your metro platform screen door and gate products, WPSD offer system wherever in the world it is located further safety and operational through flexible and customized service enhancements such as the WPSD Gap contracts. Filler and WPSD Media Wall with Sound systems. Platform Screen Systems Westinghouse Platform Screen Doors PRODUCT SPECIFIC BENEFITS BY TYPE Westinghouse Way, Hampton Park East, Melksham Wiltshire SN12 6TL PLATFORM SCREEN PLATFORM EDGE PLATFORM SAFETY United Kingdom DOORS (PSD) DOORS (PED): GATES (PSG): Tel: +44 (0)1225 898700 Fax: +44(0)1225 898710 n Full height screen work n Screen work 2.3 metres to 2.5 metres n Screen work 1.3 metres to 1.7 metres WWW.PLATFORMSCREENDOORS.COM n Full height systems offer the ultimate in high (typical) high (typical) platform enhancement n Allows free flow of air for platform n Allows free airflow for ventilation n Civil interface is at the platform and ventilation n Mounted directly onto finished floor ceiling level n Civil interface at platform level only n Rapid installation APPLICATIONS n Train noise is suppressed n Can be fitted new and in most cases, n Can be fitted new and in most cases, n Economical air conditioning of the retrofitted retrofitted Heavy Metro Systems | Light Rail Vehicles | Metros | New and platform is possible n Option of Media Wall with Sound n Option of Media Wall with Sound Retrofit Installations | People Movers | Underground, n Can be fitted new and in most cases, retrofitted Overground and Elevated Platforms n Option of Media Wall with Sound ENHANCED PASSENGER SAFETY This publication may be subject to alteration without prior notice. -

Platform Screen Door System Creating New Era of Platform Screen Door System Creating New Era of About Us Hakkımızda
Creating New Era of Platform Screen Door System www.nanegroup.com www.nanegroup.com Creating New Era of Platform Screen Door System Creating New Era of About Us Hakkımızda NRT is established on September 2000 to supply NRT (Korean Demiryolu Şirketi) için tren kapı motor test train door engine tester for Korail (Korean Railroad cihazı tedarik Eylül 2000 tarihinde kurulmuştur. 2005 Company). On 2005 NRT developed PSD systems NRT PSD sistemleri entegrasyonu geliştirilen ve aynı integration and also performed a pilot installation. zamanda bir pilot kurulumu gerçekleştirildi. Ve 2006 And in 2006 NRT signed an agreement with SMRT yılında NRT PSD sistemleri geliştirme için smrt ile bir (one of the Seoul subway operators) for PSD systems anlaşma (Seul metro operatörlerinden biri) imzalandı. development. O zamandan beri NRT Güney Kore lider PSD sistemleri Since then NRT became one of the leading PSD systems üreticilerinden biri oldu. NRT hatları ve Seul KORAIL manufacturer in South Korea. NRT provided Platform birkaç istasyonları işletilen smrt için Platform Screen Screen Door systems for SMRT operated lines and Door sistemleri sağladı. several stations of Korail in Seoul. Ayrıca NRT çeşitli patent ve tasarım tescilleri ile PSD Also NRT is a key innovator in PSD systems with sistemlerinde önemli bir öncüdür. NRT en dişli tahrik several patents and design registrations. NRT’s worm mekanizması önemli ölçüde daha az bakım işleri gear driving mechanism requires significantly less gerektirir ve PSD sistemlerinin ömrünü uzatır. maintenance works and extends PSD systems lifetime. 6 NRT is a key innovator in PSD systems with several patents and design registrations. NRT çeşitli patent ve tasarım tescilleri ile PSD sistemlerinde önemli bir öncüdür. -

The Effectiveness of Platform Screen Doors for the Prevention of Subway Suicides in South Korea
Journal of Affective Disorders 194 (2016) 80–83 Contents lists available at ScienceDirect Journal of Affective Disorders journal homepage: www.elsevier.com/locate/jad Short communication The effectiveness of platform screen doors for the prevention of subway suicides in South Korea Yong Woon Chung a, Sung Jin Kang b, Tetsuya Matsubayashi c, Yasuyuki Sawada d, Michiko Ueda e,n a Korea University, South Korea b Korea University and Green School, KU-KIST, South Korea c Osaka University, Japan d The University of Tokyo, Japan e Syracuse University, United States article info abstract Article history: Background: Subway suicide can significantly impact the general public. Platform Screen Doors (PSDs) Received 12 October 2015 are considered to be an effective strategy to prevent suicides at subway stations, but the evidence on Received in revised form their effectiveness is limited. 21 December 2015 Methods: We assessed the effectiveness of installing half- and full-height platform screen doors in re- Accepted 12 January 2016 ducing subway suicides using Poisson regression analysis. Ten-year monthly panel data for 121 subway Available online 13 January 2016 stations between 2003 and 2012 in the Seoul metropolitan area were used for the analysis. Keywords: Results: We found that installing PSDs decreases fatal suicide cases by 89% (95% CI: 57–97%). We also Suicide found that the installation of full-height PSDs resulted in the elimination of subway suicides by com- Suicide prevention pletely blocking access to the track area; however, half-height PSDs, which do not extend to the ceiling of Metro suicide the platform, were not as effective as full-height ones. -

Installation of Platform Screen Doors for the MTR Airport Express Line and Tung Chung Line in Hong Kong
Together we engineer a better Asia Installation of Platform Screen Doors for the MTR Airport Express Line and Tung Chung Line in Hong Kong Developer MTR Corporation JEC Scope Installation of platform screen doors at the platforms of Airport Express Line & Tung Chung Line Location Hong Kong Project Completion Date 1998 Jardine Engineering Corporation (JEC) installed Hong Kong's first platform screen doors on a number of stations for the Mass Transit Railway (MTR). This was one of the first time this equipment had been installed the region. JEC installed the platform screen doors of over 4km linear length at 10 stations for the Airport Express and the Tung Chung Lines: a) Airport Express Line: Airport, Tsing Yi, Kowloon and Hong Kong Stations b) Tung Chung Line: Tung Chung, Tsing Yi, Lai King, Olympic, Kowloon and Hong Kong Stations Purpose of Screen Doors There are many advantages to installing platform screen doors. The platform-long screen doors also provide a physical separation between the tracks and platform to enhance passengers’ safety. It also reduces noise created when a train is approaching the platform. The screen doors significantly improve the station environment by preventing the escape of air- conditioned air. This reduces the loading to the railway's environmental control system and in turn reduces energy consumption. The introduction of screen doors to the Airport Express and Tung Chung Lines was a success and the technology has been extended to a large number of MTR stations in Hong Kong. The technology provides a better transportation environment for MTR passengers. Jardine Engineering Corporation www.jec.com T011-0510H. -

Innovation, Technology & Strategy for Asia Pacific's Rail Industry
Innovation, technology & strategy for Asia Pacific’s rail industry DATES VENUE 21–22 Hong Kong Convention & March 2017 Exhibition Centre www.terrapinn.com/aprail Foreword from MTR Dear Colleagues, As the Managing Director – Operations & Mainland Business of MTR Corporation Limited, I want to welcome you to Hong Kong. We are pleased to once again be the host network for Asia Pacific Rail, a highly important event to Asia Pacific’s metro and rail community. Now in its 19th year, the show continues to bring together leading rail experts from across Asia and the world to share best practices with each other and address the key challenges we are all facing. With so much investment into rail infrastructure, both here in Hong Kong and in many cities across the world, as we move towards an increasingly smart, technology-enabled future, this event comes at an important time. We are proud to showcase some of the most forward-thinking technologies and operations & maintenance strategies that are being developed, and to explore some of Asia’s most exciting rail investment opportunities. Asia Pacific Rail 2017 will once again feature the most exciting project updates from both metro and mainline projects across Asia Pacific. The expanded 2017 agenda will explore major issues affecting all of us across the digital railway, rolling stock, asset management, high speed rail, freight, finance & investment, power & energy, safety and more, ensuring we are truly addressing the needs of the entire rail community. We are pleased to give our support to the 19th Asia Pacific Rail and would be delighted to see you in Hong Kong in March. -
Platform–Train Interface for Rail Passengers – a Technology Review
Platform–train interface for rail passengers – a technology review Platform–train interface for rail passengers – technology review DOCUMENT CONTROL SHEET Document: Final report CRC for Rail Innovation Title: Platform–train interface for rail passengers – technology review Old Central Station, 290 Ann St, Brisbane QLD 4000 Project Leader: Dr Dhamodharan Raman Authors: Rajkumar Devadoss, Shan Sanjar Ahmad and Dr Dhamodharan GPO Box 1422 Raman Brisbane Qld 4001 Project no: R3.115 Tel: +61 7 3221 2536 Fax: +61 7 3235 2987 Project name: Platform access www.railcrc.net.au Synopsis: The main purpose of this report is to review the solutions available in the public domain to address the platform gap issues of passenger rail operations in Australia. Passengers, in particular passengers with reduced mobility (including the disabled and aged people), experience difficulties in accessing railway platforms primarily due to the lack of suitable technologies or to the intrinsic design limits of platforms and rolling stock. A feasible, robust and cost-effective engineering solution is required to overcome this critical platform access issue. Various patented solutions and other solutions that are used worldwide are discussed briefly in the report. In addition, a couple of new solutions are designed and suggested in the report. Considering the lack of detailed information about the existing solutions, a basic qualitative analysis was conducted to rank the solutions. This analysis was conducted with respect to various factors, including costs involved, ease of implementation, applicability of the solutions for different platform setups, and operational safety. Most of the solutions discussed in the report are designed for high level platforms, and only cater for horizontal gaps. -

The Effect of Platform Screen Doors on PM10 Levels in a Subway Station and a Trial to Reduce PM10 in Tunnels
Asian Journal of Atmospheric Environment Vol. 7-1, pp.38-47, March 2013 doi: http://dx.doi.org/10.5572/ajae.2013.7.1.038 The Effect of Platform Screen Doors on PM10 Levels in a Subway Station and a Trial to Reduce PM10 in Tunnels Youn-Suk Son1,2), Amgad Salama2), Hye-Seon Jeong3), Suhyang Kim3), Jin-Ho Jeong2), Jaihyo Lee4), Young Sunwoo2,3) and Jo-Chun Kim2,3),* 1)Exposure, Epidemiology, and Risk Program, Department of Environmental Health, Harvard School of Public Health, Boston, Massachusetts, USA 2)Department of Environmental Engineering, Konkuk University, 1 Hwayang-dong, Gwangjin-Gu, Seoul 143-701, Korea 3)Department of Advanced Technology Fusion, Konkuk University, 1 Hwayang-dong, Gwangjin-Gu, Seoul 143-701, Korea 4)Department of Mechanical Engineering, Konkuk University, 1 Hwayang-dong, Gwangjin-Gu, Seoul 143-701, Korea *Corresponding author. Tel: +82-2-450-4009, Fax: +82-455-2994, E-mail: [email protected] lation density. It also produces high emissions of air ABSTRACT pollutants. Since an individual usually spends most of their working hours indoors, environmental air quality PM concentrations were measured at four monitor- 10 is directly related to indoor air quality (IAQ). Especi- ing sites at the Daechaung station of the Seoul sub- ally, the American Environmental Protection Agency way. The four locations included two tunnels, a plat- (EPA) reported that in the United States the mean daily form, and a waiting room. The outside site of the residential time spent in indoor areas was 21 hrs, and subway was also monitored for comparison purposes. In addition, the effect of the platform screen doors in Germany, the GerES II asserted that this duration was 20 hr. -

Experimental Investigation of Air Quality in a Subway Station with Fully Enclosed Platform Screen Doors
International Journal of Environmental Research and Public Health Article Experimental Investigation of Air Quality in a Subway Station with Fully Enclosed Platform Screen Doors Liping Pang 1,2, Chenyuan Yang 1, Xiaodong Cao 1,*, Qing Tian 3 and Bo Li 3 1 School of Aeronautic Science and Engineering, Beihang University, Beijing 100191, China; [email protected] (L.P.); [email protected] (C.Y.) 2 School of Aero-Engine, Shenyang Aerospace University, Shenyang 110136, China 3 School of Information Science and Technology, North China University of Technology, Beijing 100144, China; [email protected] (Q.T.); [email protected] (B.L.) * Correspondence: [email protected]; Tel.: +86-188-0019-6168 Received: 2 June 2020; Accepted: 15 July 2020; Published: 19 July 2020 Abstract: In this study, the indoor air quality (IAQ) was investigated in a subway station with fully enclosed platform screen doors in Beijing, China. Eight indoor air pollutants, including PM2.5, PM10, SO2 (sulfur dioxide), NO2 (nitrogen dioxide), NH3 (ammonia), CO (carbon monoxide), CH2O (formaldehyde) and TVOC (total volatile organic compound), were measured for six consecutive days in October 2019. The results indicated that the IAQ in the subway station was basically stable at good levels for most times during the whole measurement period. All eight indoor air pollutants were far below their corresponding maximum allowable concentrations, except for the PM2.5 concentrations, which occasionally exceeded the concentration limits. The concentrations of indoor air pollutants in the subway station were basically within the corresponding standards. The correlation analyses showed that outdoor air pollutants have important influences on indoor air pollutants. -

Railway Applications — Design for PRM Use - General Requirements — Part 2: Information
CEN/TC 256 CEN/TCDate: 256/WG2015-06 44 N 323 FprEN 16584-2:2015 CEN/TC 256 Secretariat: DIN Railway Applications — Design for PRM Use - General Requirements — Part 2: Information Bahnanwendungen — Behindertengerechte Gestaltung — Teil 2: Allgemeine Anforderungen - Informationen Élément introductif — Élément central — Partie 2 : Élément complémentaire FprEN 16584-2:2015 (E) Contents Page Introduction ........................................................................................................................................................ 5 1 Scope...................................................................................................................................................... 6 2 Normative references ........................................................................................................................... 7 3 Terms and definitions ........................................................................................................................... 8 4 Symbols and abbreviations ............................................................................................................... 12 5 Requirements and assessment methodology ................................................................................. 12 5.1 General ................................................................................................................................................. 12 5.2 Infrastructure ...................................................................................................................................... -

Press Release the Ratp Selects Faiveley Transport and Eiffage Énergie To
Paris, 4 March 2016 PRESS RELEASE THE RATP SELECTS FAIVELEY TRANSPORT AND EIFFAGE ÉNERGIE TO EQUIP LINE 4 OF THE PARIS METRO WITH PLATFORM SCREEN DOORS As part of the automation of Line 4 of the Paris Metro approved by Paris region transport authority (STIF), RATP has selected Faiveley Transport, in consortium with Eiffage Énergie Ferroviaire, to provide platform screen doors for the 27 existing stations and the 2 new stations that will extend the line to Bagneux. The contract amounts to more than €75 million. The Line 4 stations will all be equipped with platform edge barriers, as is the case on the automated Lines 1 and 14. Full automation of the line is scheduled for 2022. Faiveley Transport will be responsible for the study, development, supply, certification, installation, testing and commissioning of semi-full height platform edge barriers. The studies, production and monitoring of the installation will be carried out by the Saint-Pierre des Corps (Touraine) site, the Group’s Platform Screen Doors Centre of Competence. Eiffage Énergie Ferroviaire will be responsible for the factory pre-assembly of the platform edge barriers and the on-site installation of the modules made in this way, 18 per platform. Installation and integration work and testing are to be carried out without any interruption and without disrupting service on the line, whilst ensuring safety levels are maintained. In order to meet these requirements, Faiveley Transport will pioneer a new modular fitting system, with the platform edge barriers being anchored to the ground. Eiffage Énergie Ferroviaire will use new tools for fitting platform barrier modules from a carriage, a system specifically developed to meet the time constraints of this project. -
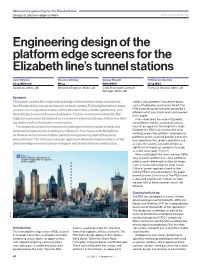
Engineering Design of the Platform Edge Screens for the Elizabeth Line’S Tunnel Stations
Structural engineering for the Elizabeth line Design of platform edge screens thestructuralengineer.org Engineering design of the platform edge screens for the Elizabeth line’s tunnel stations Julian Birbeck Rosemary Smiley George Stowell Ed Newman-Sanders CEng, MIStructE MEng RIBA, MRIAI CEng, MICE Associate, Atkins, UK Structural Engineer, Atkins, UK C100 Framework Contract Technical Director, Atkins, UK Manager, Atkins, UK Synopsis This paper covers the engineering design of the platform edge screens for stations with platforms in basement boxes, fi ve Elizabeth line tunnel stations in central London. Full-height platform edge such as Paddington and Canary Wharf. The screens are a signature feature of the Elizabeth line’s station platforms, and PES-frame design for the latter presented a diff erent set of constraints and is not covered their design presented many challenges. To gain maximum uniformity, the in this paper. edge screens were developed as a common reference design, which was then From street level, the scale of Elizabeth issued to each of the station contractors. line platforms and the associated screens The paper describes the technical challenges from the point of view of a may not be apparent. The length of a single structural engineer, but in doing so, it draws in interfaces with disciplines Elizabeth line PES is up to twice that of an existing London tube platform. Underground as diverse as tunnel ventilation, electrical engineering, and rolling stock platforms on this scale will provide a dramatic procurement. The reference design approach allowed unique features of the new experience for London commuters and, platform edge screens to be prototyped and tested before construction. -

1 Evacuation Conditions in a Subway Stations With
PROCEEDINGS, Fire and Evacuation Modeling Technical Conference (FEMTC) 2016 Malaga, Spain. November 15-18, 2016. EVACUATION CONDITIONS IN A SUBWAY STATIONS WITH PLATFORM SCREEN DOORS Daniel Octavio de Toledo, Mechanical Engineer, GEOCONTROL S.A. e-mail: [email protected] Rafael Sánchez, Mining Engineer, GEOCONTROL S.A. email: [email protected] ABSTRACT Safety concerns are playing a determinant role in the design of infrastructures, such as subway stations. Therefore, new solutions are being studied and analyzed in order to improve the global safety level. Among these solutions, platform screen doors (PSD) are having a key role, since their use offers important advantages, especially when it comes to facing an emergency situation involving a fire in a subway carriage. As a consequence of the placement of PSD in subway stations, the ventilation strategy must be adapted, because if there is a fire inside a subway carriage, part of the smoke can more easily be isolated from the passengers in the platform. Thus, two possible scenarios can be assessed depending on the existence or not of PSD: ‐ Without PSD: smoke can’t be isolated and, thus, it can spread all along the platform, being mostly extracted through the tunnel by a ventilation shaft. ‐ With PSD: part of the smoke can be isolated from the passengers in the platform and it is extracted by one of the tunnel ventilation shafts. The remaining part is extracted by the station exhaust system. The shape of the station has also its relevancy in terms of safety, mainly because in a fire event, the buoyancy force makes smoke head toward certain places where the evacuation routes may be placed.