Joint Annual Meeting of LEAG-ICEUM-SRR (2008) V
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Domi Inter Astra
Team members Alice Sueko Müller | Anshoo Mehra | Chaitnya Chopra | Ekaterina Seltikova Isabel Alonso Serrano | James Xie | Jay Kamdar | Julie Pradel | Kunal Kulkarni Matej Poliaček | Myles Harris | Nitya Jagadam | Richal Abhang | Ruvimbo Samanga | Sagarika Rao Valluri Sanket Kalambe | Sejal Budholiya | Selene Cannelli Space Generation Advisory Council Team 1 Contents Society and Culture 3 Tourist Attractions 3 Astronaut and Tourist Selection 3 Architecture 4 Module 1: Greenhouse, Guest Amenities, Medicine, and Environmental Control 5 Module 2: Social Space and Greenhouse 5 Module 3: Kitchen, Fitness, Hygiene, and Social 6 Module 3: Sky-view 6 Module 4: Crew Bedrooms and Private Social Space 6 Module 5: Workspace 6 Management and Politics 7 Governance, Ownership, and Intellectual Property 7 Crew Operations 7 Base Management System 8 Safety & Emergency Planning 8 Engineering 9 Landing & Settlement Site 9 Settlement Structure 10 Robotics and Extravehicular Activities (EVAs) 10 Construction Timeline 11 Communications System 12 Critical Life Support (Air & Water) Systems 12 Thermal System 13 Food & Human Waste Recycling 14 Other Waste 14 Technical Floor Plan 14 Power Generation & Storage 14 Economy 16 Capital & Operating Costs 16 Revenue Generation 17 Tourism & Outreach 17 Commercial Activities 18 Lunar Manufacturing 18 References 20 ntariksha, aptly meaning ‘the universe’ in to be a giant leap for all the young girls around the Sanskrit, is an avid stargazer fascinated world, and she knew something incredible is waiting by the blanket of splurging stars she saw to be known. from her village in North East India. To- day, her joy knew no bounds upon learn- “Each civilization must become space-faring or ex- ingA that she would get a chance to visit Domi Inter tinct”. -
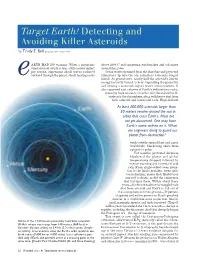
Detecting and Avoiding Killer Asteroids
Target Earth! Detecting and Avoiding Killer Asteroids by Trudy E. Bell (Copyright 2013 Trudy E. Bell) ARTH HAD NO warning. When a mountain- above 2000°C and triggering earthquakes and volcanoes sized asteroid struck at tens of kilometers (miles) around the globe. per second, supersonic shock waves radiated Ocean water suctioned from the shoreline and geysered outward through the planet, shock-heating rocks kilometers up into the air; relentless tsunamis surged e inland. At ground zero, nearly half the asteroid’s kinetic energy instantly turned to heat, vaporizing the projectile and forming a mammoth impact crater within minutes. It also vaporized vast volumes of Earth’s sedimentary rocks, releasing huge amounts of carbon dioxide and sulfur di- oxide into the atmosphere, along with heavy dust from both celestial and terrestrial rock. High-altitude At least 300,000 asteroids larger than 30 meters revolve around the sun in orbits that cross Earth’s. Most are not yet discovered. One may have Earth’s name written on it. What are engineers doing to guard our planet from destruction? winds swiftly spread dust and gases worldwide, blackening skies from equator to poles. For months, profound darkness blanketed the planet and global temperatures dropped, followed by intense warming and torrents of acid rain. From single-celled ocean plank- ton to the land’s grandest trees, pho- tosynthesizing plants died. Herbivores starved to death, as did the carnivores that fed upon them. Within about three years—the time it took for the mingled rock dust from asteroid and Earth to fall out of the atmosphere onto the ground—70 percent of species and entire genera on Earth perished forever in a worldwide mass extinction. -

Joint Session on Human and Robotic Partnerships to Realize Space Exploration Goals (3.-B3.6)
Paper ID: 11248 62nd International Astronautical Congress 2011 14th HUMAN EXPLORATION OF THE MOON AND MARS SYMPOSIUM (A5) Joint session on Human and Robotic Partnerships to Realize Space Exploration Goals (3.-B3.6) Author: Mr. Dipl. Physiker. Jeffrey Hendrikse Airbus DS GmbH, Germany, jeff[email protected] Ms. Ayako Ono Tohoku University Graduate School of Medicine, Japan, [email protected] Dr. Irene Lia Schlacht Politecnico di Milano / Technische Universitaet Berlin, Italy, [email protected] Mr. Ivo Ferreira Instituto Superior T´ecnico,Portugal, [email protected] Dr. Balwant Rai India, drbalwantraissct@rediffmail.com Mr. Romain Benchenafi Ecole de l'Air, France, r.benchenafi@hotmail.fr Mr. K´evinTheatre Ecole de l'Air, France, [email protected] Ms. Audrey Lan San Ecole de l'Air, France, [email protected] Mr. Quentin Bourges Ecole de l'Air, France, [email protected] Mr. Matthieu Ansart Ecole de l'Air, France, [email protected] Ms. Rachel Dompnier Ecole de l'Air, France, rachel [email protected] Prof. Bernard Foing ILEWG, The Netherlands, [email protected] HUMAN AND ROBOTIC PARTNERSHIPS FROM EUROMOONMARS ANALOGUE MISSIONS 2011 Abstract The International Lunar Exploration Working Group (ILEWG) through the means of the EuroMoon- Mars missions investigates the feasibility and limitations of human and robotic planetary exploration. Field tests were performed since 2008 up to 2011 at the Mars Desert Research Station (MDRS) in Utah. In two week rotations crews of six members came to the station to perform new missions and established the knowledge, conditions, systems, and equipment necessary to perform successful planetary exploration activities. -

18Th EANA Conference European Astrobiology Network Association
18th EANA Conference European Astrobiology Network Association 24-28 September 2018 Freie Universität Berlin, Germany Sponsors: Scientific Organizing Committee (EANA Council): Daniela Billi, Italy Oleg Kotsyurbenko, Russia Alexis Brandeker, Sweden Helmut Lammer, Austria John Brucato, Italy Harry Lehto, Finland Barbara Cavalazzi, Italy Kirsi Lehto, Finland Elias Chatzitheodoridis, Greece Zita Martins, Portugal Charles Cockell, UK Nigel Mason, UK Hervé Cottin, France Ralf Möller, Germany Rosa De la Torre, Spain Christine Moissl-Eichinger, Austria Jean-Pierre De Vera, Germany Lena Noack, Germany René Demets, ESA Karen Olsson-Francis, UK Cristina Dobrota, Romania François Raulin, France Pascale Ehrenfreund, The Netherlands Petra Rettberg, Germany Franco Ferrari, Poland Séverine Robert, Belgium Kai Finster, Denmark Gyorgyi Ronto, Hungary Muriel Gargaud, France Dirk Schulze-Makuch, Germany Beda Hofmann, Switzerland Alan Schwartz, The Netherlands Nils Holm, Sweden Ewa Szuszkiewicz, Poland Jan Jehlicka, Czech Republic Ruth-Sophie Taubner, Austria Jean-Luc Josset, Switzerland Jorge Vago, The Netherlands Kensei Kobayashi, Japan Frances Westall, France Local Organizing Committee: Lena Noack (FU) Lutz Hecht (MfN, FU) Jean-Pierre de Vera (DLR, DAbG) Jacob Heinz (TU) Dirk Schulze-Makuch (TU, DAbG) Dennis Höning (VU Amsterdam) Alessandro Airo (TU) Deborah Maus (TU) Felix Arens (FU) Ralf Möller (DLR) Alexander Balduin Carolin Rabethge (FU) Mickael Baqué (DLR) Heike Rauer (DLR, TU, FU) Doris Breuer -

Abstract #1643
1/20/2017 CIM | TPMS | Abstract #1643 English Proving and Improving Martian Mining ISRU technology in Hawai`i The island of Hawai`i has been the stage for the only NASA ISRU field tests in 2008, 2010 and 2012. Focused on lunar ISRU and the RESOLVE/Resource Prospector Mission, much can be learned and developed from these experiences as applied to Martian ISRU. Hawaiian tephra has proven geochemical similarities to Mars, and also is the source of the geotechnical NASAJSC1A Mars Simulant. Hawaii is ideal for long term facilities/equipment testing and operational models needed prior to extended human missions to Mars. French No abstract title in French No French resume Author(s) and CoAuthor(s) Mr. John C. Hamilton EPO: Logistics Manager PISCES Pacific International Space Center for Exploration Systems https://www.cim.org/en/TPMSEvent/Chair/ChairAbstractPool.aspx 1/1 4/26/2017 CIM | TPMS | Profile of Mr. John Hamilton General Email(s): [email protected] Position: EPO: Logistics Manager Preferred Language: [Language not defined] Addresses Business Home PISCES Pacific International Space Center for Exploration Systems PO Box 615 Pepeekeo Hawaii United States 96720 Biographies Biography submitted with the abstract John Hamilton is on faculty with the Department of Physics and Astronomy at the University of Hawaii at Hilo, on the majestic island of Hawaii. As the Research Operations Manager of the newly formed PISCES (the Pacific International Space Center for Exploration Systems) in 2007 at the university, he managed multiple field tests with NASA, CSA, DLR, and ESA with surface technologies and ISRU. PISCES later was spun off as a State Agency, where John serves in the dual role of Education/Public Outreach and Logistics manager. -
ASX Presentation
STARFEST 2009 Special Report: Major Astronomy & Space Conferences Presented On: August 22, 2009 Presented By: ASX ‐ Farnaz Ghadaki (President) ‐ Nivedita Chandrasekhar (Project Director) ‐ Iman Datta (Secretary) http://asx.sa.utoronto.ca/ [email protected] Page 1 Agenda • ASX Introduction • Report on ISDC –International Space Development Conference (May 2008) • Report on Canadian Space Summit (Nov. 2008) • Report on SpaceFest (Feb. 2009) • Report on ASX’s Annual Symposium • Notable upcoming symposia/conferences • Q & A http://asx.sa.utoronto.ca/ [email protected] Page 2 ASX Introduction • ASX is the Astronomy & Space Exploration Society at the University of Toronto • ASX’s mission: educate, excite, and inspire students and the general public about astronomy and space exploration • ASX members consist of students, professionals and anyone having an interest (or just curiosity) in the fields of astronomy and space • ASX has no membership fees, and provides most of its events FREE of charge http://asx.sa.utoronto.ca/ [email protected] Page 3 ASX Highlights • Established by students in 2003 • Rapidly grown to over 1600 members • Host the LARGEST student‐run event in the GTA: The Annual ‘Expanding Canada’s Frontiers’ Symposium • Organize variety of other events throughout the year: Film Viewing Faces of Space (FoS) Talks Observing Panel Discussions http://asx.sa.utoronto.ca/ [email protected] Page 4 ASX and IYA • ASX participated in the Toronto Astronomy Festival (Jan. 10) @ OSC – Exhibitor & on planning committee • ASX Symposium (Jan. 23) embraced theme of international cooperation • Earth Hour Observing Event (Mar. 28) in collaboration with U of T Astronomy Dept • Co‐host of Yuri’s Night Celebration (Apr. -
Download the 2014 ASDC National Conference Delegate List As
Organisation Delegate ASDC Dr Penny Fidler ASDC Dr Michaela Livingstone ASDC Maddy Foard A D Hunt Ltd Dr Anne Hunt Aardman Animations Heather Wright Aardman Animations Ian Haynes Amgueddfa Cymru - National Museum Wales Liam Doyle Anglian Water Marcia Davies Anglian Water Ellie Henderson Arts Council England Laura Gander-Howe At-Bristol Science Centre Phil Winfield At-Bristol Science Centre Bonnie Buckley At-Bristol Science Centre Dan Bird At-Bristol Science Centre Jo Bryant At-Bristol Science Centre Dr Kathy Fawcett At-Bristol Science Centre John Polatch At-Bristol Science Centre Raj Bista Babraham Institute Linden Fradet BBC Science Helen Thomas BBSRC Rebecca Kerby Ben Gammon Consulting Dr Ben Gammon BIG - STEM Communicators Network James Piercy Birmingham Museum and Art Gallery Dr Kenny Webster BIS Susannah Wiltshire Blenheim Accounting Chris Godden Blenheim Accounting Gill Godden BIS Chris Shipley BP Ian Duffy British Science Association Dr Christina Fuentes Tibbitt Cambridge Science Centre Rosemary Ansell Cambridge Science Centre Gaetan Lee Cancer Research UK Kirsteen Campbell Catalyst Science Discovery Centre Dr Diana Leitch Centre of the Cell Umme Aysha CERN@school Clare Harvey CERN@school Dr Tom Whyntie Daredevil Labs / Wellcome Trust Greg Foot Dundee Science Centre Linda Leuchars Dundee Science Centre Louise Smith Dundee Science Centre Rebecca Erskine Eden Project Gordon Seabright Eden Project Gabriella Gilkes Eureka! The National Children's Museum Leigh-Anne Stradeski EXplora Science, Technology and Discovery Centre Caroline Galpin -

Project Horizon Report
Volume I · SUMMARY AND SUPPORTING CONSIDERATIONS UNITED STATES · ARMY CRD/I ( S) Proposal t c• Establish a Lunar Outpost (C) Chief of Ordnance ·cRD 20 Mar 1 95 9 1. (U) Reference letter to Chief of Ordnance from Chief of Research and Devel opment, subject as above. 2. (C) Subsequent t o approval by t he Chief of Staff of reference, repre sentatives of the Army Ballistic ~tissiles Agency indicat e d that supplementar y guidance would· be r equired concerning the scope of the preliminary investigation s pecified in the reference. In particular these r epresentatives requested guidance concerning the source of funds required to conduct the investigation. 3. (S) I envision expeditious development o! the proposal to establish a lunar outpost to be of critical innportance t o the p. S . Army of the future. This eva luation i s appar ently shar ed by the Chief of Staff in view of his expeditious a pproval and enthusiastic endorsement of initiation of the study. Therefore, the detail to be covered by the investigation and the subs equent plan should be as com plete a s is feas ible in the tin1e limits a llowed and within the funds currently a vailable within t he office of t he Chief of Ordnance. I n this time of limited budget , additional monies are unavailable. Current. programs have been scrutinized r igidly and identifiable "fat'' trimmed awa y. Thus high study costs are prohibitive at this time , 4. (C) I leave it to your discretion t o determine the source and the amount of money to be devoted to this purpose. -
Classroom Physics June 2014 Edition
ClassroomThe newsletter for affiliated schools physicsJune 2014 Issue 29 Teacher support IOP successfully wins extension to Stimulating Physics Network support The Institute, in partnership with Myscience, IOP has been awarded a new contract by the Department for Education to run the Stimulating Physics Network (SPN) until March 2016. The SPN is an important national programme supporting the teaching and learning of physics in schools across England; this contract ensures that the SPN free, open CPD workshops for teachers in will continue operating for at least another the SLP’s associated schools and the local two years, which is an endorsement of the area. These activities will complement and success and impact that has been achieved support the SLP and its wider objectives, by the programme to date. and will form a national programme of physics CPD that is available to all teachers Celebrating success in England. Since 2012, the Institute’s SPN has facilitated more than 80,000 teacher hours Expansion to counter stereotyping of physics CPD and more than 60,000 Over the next two years, the SPN will pupils have experienced SPN engagement also be running a new pilot project called activities. The SPN is based around a team of Improving Gender Balance (IGB). A team 35 teaching and learning coaches (TLCs) who of specialist project officers will work are all highly experienced and successful intensively with 20 schools for two years, to physics teachers; each TLC providing support identify and resolve the issues surrounding to 12 SPN Partner Schools. the disproportionately low number of The aim of the SPN is to improve pupils’ A teacher attending a “Fun is Physics” session at girls studying A-level physics, including experience of physics at Key Stage 3 and a Stimulating Physics Network Summer School girls’ confidence and resilience, teachers’ 4, as measured by an increase in the (four-day residential CPD courses held at Oxford, classroom practice, and whole-school number of pupils choosing to study A-level Cambridge and York each year). -

Call Duty Back Ops 2 for Pc Download MULTIPLAYER
call duty back ops 2 for pc download MULTIPLAYER. In Call of Duty®: Ghosts multiplayer, customize your soldier and squad for the first time. Level environments are more realistic and immersive than ever before. Your Soldier. CREATE-A-SOLDIER. In Call of Duty®: Ghosts you don't just create a class, you create a soldier. Choose the head, body type, head-gear and equipment, and you can even create a female soldier for the first time. With over 20,000 possible combinations, you can create the soldier you've always wanted. And each soldier you create will also have his or her own load outs. KILL STREAKS, ADVANCED WEAPONRY & PERKS. There are over 20 NEW Kill Streaks in Call of Duty®: Ghosts — such as Juggernaut Maniac, Helo-Scout, Vulture and the ODIN Strike. You can even bring in Riley, from the single-player campaign, as your guard dog to warn you and attack when enemies are near. Scorestreaks are back, and can now be customized – to alter performance attributes or increase the power of a particular streak. The new Perks System has a value from 1 to 5, and you have 8 points to allocate. You could also choose to get rid of your secondary weapon and get up to 11 perks. SQUADS. Squads introduces a whole new level of competition to Call of Duty. We've taken the best parts of the Multiplayer experience and combined that with a vastly improved AI and our new mechanic of creating your own squad-mates. All the hard work you've put into customizing, playing, and prestiging your squad can now be put to use on a brand new playing field. -

A New Hope for International Space
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Seton Hall University Libraries A NEW HOPE FOR INTERNATIONAL SPACE LAW: INCORPORATING NINETEENTH CENTURY FIRST POSSESSION PRINCIPLES INTO THE 1967 SPACE TREATY FOR THE COLONIZATION OF OUTER SPACE IN THE TWENTY-FIRST CENTURY Brandon C. Gruner∗ INTRODUCTION Legend has it that a friend once asked Mark Twain what he should invest in, and the good-humored author responded “Buy land; they’ve stopped making it.”1 The author’s advice was given more than 100 years ago and it still makes good sense. If a resource is scarce, it is almost always going to become more valuable.2 It is ∗ J.D. Candidate, 2005, Seton Hall University School of Law; B.A. Magna Cum Laude, Phi Beta Kappa, History, 1999, New York University: College of Arts and Science. I would like to thank my parents, Robert and Maria Gruner, for their unwavering support throughout my education, and Paula A. Franzese, the Peter W. Rodino Professor of Law at Seton Hall Law School, for her invaluable knowledge and guidance in writing this Comment. 1 A search of the Lexis and Westlaw databases, as well as the World Wide Web, demonstrates that hundreds of newspapers and Web sites have attributed this quote or some similar version to Mark Twain. See, e.g., Clinton J. Fynes, “Ambassadorial Role” Leads Ian to Property, COURIER-MAIL, Oct. 12, 1990 (relaying the story of Mark Twain advising his friend to “Buy land, they’re not making any more of it.”); Tom Fegely, Lack of Action on Tag Fees Pinches Gamelands Purchases, Maintenance, MORNING CALL (Allentown, PA), Sept. -
Issue #1 – 2012 October
TTSIQ #1 page 1 OCTOBER 2012 Introducing a new free quarterly newsletter for space-interested and space-enthused people around the globe This free publication is especially dedicated to students and teachers interested in space NEWS SECTION pp. 3-22 p. 3 Earth Orbit and Mission to Planet Earth - 13 reports p. 8 Cislunar Space and the Moon - 5 reports p. 11 Mars and the Asteroids - 5 reports p. 15 Other Planets and Moons - 2 reports p. 17 Starbound - 4 reports, 1 article ---------------------------------------------------------------------------------------------------- ARTICLES, ESSAYS & MORE pp. 23-45 - 10 articles & essays (full list on last page) ---------------------------------------------------------------------------------------------------- STUDENTS & TEACHERS pp. 46-56 - 9 articles & essays (full list on last page) L: Remote sensing of Aerosol Optical Depth over India R: Curiosity finds rocks shaped by running water on Mars! L: China hopes to put lander on the Moon in 2013 R: First Square Kilometer Array telescopes online in Australia! 1 TTSIQ #1 page 2 OCTOBER 2012 TTSIQ Sponsor Organizations 1. About The National Space Society - http://www.nss.org/ The National Space Society was formed in March, 1987 by the merger of the former L5 Society and National Space institute. NSS has an extensive chapter network in the United States and a number of international chapters in Europe, Asia, and Australia. NSS hosts the annual International Space Development Conference in May each year at varying locations. NSS publishes Ad Astra magazine quarterly. NSS actively tries to influence US Space Policy. About The Moon Society - http://www.moonsociety.org The Moon Society was formed in 2000 and seeks to inspire and involve people everywhere in exploration of the Moon with the establishment of civilian settlements, using local resources through private enterprise both to support themselves and to help alleviate Earth's stubborn energy and environmental problems.