Intrinsic Geometry of Convex Surfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Section 1.7B the Four-Vertex Theorem
Section 1.7B The Four-Vertex Theorem Matthew Hendrix Matthew Hendrix Section 1.7B The Four-Vertex Theorem Definition The integer I is called the rotation index of the curve α where I is an integer multiple of 2π; that is, Z 1 k(s) dt = θ(`) − θ(0) = 2πI 0 Definition 2 Let α : [0; `] ! R be a plane closed curve given by α(s) = (x(s); y(s)). Since s is the arc length, the tangent vector t(s) = (x0(s); y 0(s)) has unit length. The tangent indicatrix is 2 0 0 t : [0; `] ! R , which is given by t(s) = (x (s); y (s)); this is a differentiable curve, the trace of which is contained in the circle of radius 1. Matthew Hendrix Section 1.7B The Four-Vertex Theorem Definition 2 Let α : [0; `] ! R be a plane closed curve given by α(s) = (x(s); y(s)). Since s is the arc length, the tangent vector t(s) = (x0(s); y 0(s)) has unit length. The tangent indicatrix is 2 0 0 t : [0; `] ! R , which is given by t(s) = (x (s); y (s)); this is a differentiable curve, the trace of which is contained in the circle of radius 1. Definition The integer I is called the rotation index of the curve α where I is an integer multiple of 2π; that is, Z 1 k(s) dt = θ(`) − θ(0) = 2πI 0 Matthew Hendrix Section 1.7B The Four-Vertex Theorem Definition 2 A vertex of a regular plane curve α :[a; b] ! R is a point t 2 [a; b] where k0(t) = 0. -

Symmetrization of Convex Plane Curves
Symmetrization of convex plane curves P. Giblin and S. Janeczko Abstract Several point symmetrizations of a convex curve Γ are introduced and one, the affinely invariant ‘cen- tral symmetric transform’ (CST) with respect to a given basepoint inside Γ, is investigated in detail. Examples for Γ include triangles, rounded triangles, ellipses, curves defined by support functions and piecewise smooth curves. Of particular interest is the region of basepoints for which the CST is convex (this region can be empty but its complement in the interior of Γ is never empty). The (local) boundary of this region can have cusps and in principle it can be determined from a geometrical construction for the tangent direction to the CST. MR Classification 52A10, 53A04 1 Introduction There are several ways in which a convex plane curve Γ can be transformed into one which is, in some sense, symmetric. Here are three possible constructions. PT Assume that Γ is at least C1. For each pair of parallel tangents of Γ construct two parallel lines with the same separation and the origin (or any other fixed point) equidistant from them. The resulting envelope, the parallel tangent transform, will be symmetric about the chosen fixed point. All choices of fixed point give the same transform up to translation. This construction is affinely invariant. A curve of constant width, where the separation of parallel tangent pairs is constant, will always transform to a circle. Another example is given in Figure 1(a). This construction can also be interpreted in the following way: Reflect Γ in the chosen fixed point 1 to give Γ∗ say. -

One-Dimensional Projective Structures, Convex Curves and the Ovals of Benguria & Loss
published version: Comm. Math. Phys. 336 (2015), 933-952 One-dimensional Projective Structures, Convex Curves and the Ovals of Benguria & Loss JACOB BERNSTEIN AND THOMAS METTLER ABSTRACT. Benguria and Loss have conjectured that, amongst all smooth closed curves in R2 of length 2, the lowest possible eigenvalue of the op- erator L 2 is 1. They observed that this value was achieved on a D C two-parameter family, O, of geometrically distinct ovals containing the round circle and collapsing to a multiplicity-two line segment. We characterize the curves in O as absolute minima of two related geometric functionals. We also discuss a connection with projective differential geometry and use it to explain the natural symmetries of all three problems. 1. Introduction In[ 1], Benguria and Loss conjectured that for any, , a smooth closed curve in R2 2 of length 2, the lowest eigenvalue, , of the operator L satisfied D C 1 1. That is, they conjectured that for all such and all functions f H ./, 2 Z Z 2 2 2 2 (1.1) f f ds f ds; jr j C where f is the intrinsic gradient of f , is the geodesic curvature and ds is the lengthr element. This conjecture was motivated by their observation that it was equivalent to a certain one-dimensional Lieb-Thirring inequality with conjectured sharp constant. They further observed that the above inequality is saturated on a two-parameter family of strictly convex curves which contains the round circle and degenerates into a multiplicity-two line segment. The curves in this family look like ovals and so we call them the ovals of Benguria and Loss and denote the family by 1 O. -

On Asymmetric Distances
Analysis and Geometry in Metric Spaces Research Article • DOI: 10.2478/agms-2013-0004 • AGMS • 2013 • 200-231 On Asymmetric Distances Abstract ∗ In this paper we discuss asymmetric length structures and Andrea C. G. Mennucci asymmetric metric spaces. A length structure induces a (semi)distance function; by using Scuola Normale Superiore, Piazza dei Cavalieri 7, 56126 Pisa, Italy the total variation formula, a (semi)distance function induces a length. In the first part we identify a topology in the set of paths that best describes when the above operations are idempo- tent. As a typical application, we consider the length of paths Received 24 March 2013 defined by a Finslerian functional in Calculus of Variations. Accepted 15 May 2013 In the second part we generalize the setting of General metric spaces of Busemann, and discuss the newly found aspects of the theory: we identify three interesting classes of paths, and compare them; we note that a geodesic segment (as defined by Busemann) is not necessarily continuous in our setting; hence we present three different notions of intrinsic metric space. Keywords Asymmetric metric • general metric • quasi metric • ostensible metric • Finsler metric • run–continuity • intrinsic metric • path metric • length structure MSC: 54C99, 54E25, 26A45 © Versita sp. z o.o. 1. Introduction Besides, one insists that the distance function be symmetric, that is, d(x; y) = d(y; x) (This unpleasantly limits many applications [...]) M. Gromov ([12], Intr.) The main purpose of this paper is to study an asymmetric metric theory; this theory naturally generalizes the metric part of Finsler Geometry, much as symmetric metric theory generalizes the metric part of Riemannian Geometry. -

Asymptotic Approximation of Convex Curves
Asymptotic Approximation of Convex Curves Monika Ludwig Abstract. L. Fejes T´othgave asymptotic formulae as n → ∞ for the distance between a smooth convex disc and its best approximating inscribed or circumscribed polygons with at most n vertices, where the distance is in the sense of the symmetric difference metric. In this paper these formulae are extended by specifying the second terms of the asymptotic expansions. Tools are from affine differential geometry. 1 Introduction 2 i Let C be a closed convex curve in the Euclidean plane IE and let Pn(C) be the set of all convex polygons with at most n vertices that are inscribed in C. We i measure the distance of C and Pn ∈ Pn(C) by the symmetric difference metric δS and study the asymptotic behaviour of S i S i δ (C, Pn) = inf{δ (C, Pn): Pn ∈ Pn(C)} S c as n → ∞. In case of circumscribed polygons the analogous notion is δ (C, Pn). For a C ∈ C2 with positive curvature function κ(t), the following asymptotic formulae were given by L. Fejes T´oth [2], [3] Z l !3 S i 1 1/3 1 δ (C, Pn) ∼ κ (t)dt as n → ∞ (1) 12 0 n2 and Z l !3 S c 1 1/3 1 δ (C, Pn) ∼ κ (t)dt as n → ∞, (2) 24 0 n2 where t is the arc length and l the length of C. Complete proofs of these results are due to D. E. McClure and R. A. Vitale [9]. In this article we extend these asymptotic formulae by deriving the second terms in the asymptotic expansions. -

Isometric Actions on Spheres with an Orbifold Quotient
ISOMETRIC ACTIONS ON SPHERES WITH AN ORBIFOLD QUOTIENT CLAUDIO GORODSKI AND ALEXANDER LYTCHAK Abstract. We classify representations of compact connected Lie groups whose induced action on the unit sphere has an orbit space isometric to a Riemannian orbifold. 1. Introduction In this paper we classify all orthogonal representations of compact connected groups G on Euclidean unit spheres Sn for which the quotient Sn/G is a Riemannian orbifold. We are going to call such representations infinitesimally polar, since they can be equivalently defined by the condition that slice representations at all non-zero vectors are polar. The interest in such representations is two-fold. On the one hand, one can hope to isolate an interesting class of representations in this way. This class contains all polar representations, which can be defined by the property that the corresponding quotient space Sn/G is an orbifold of constant curvature 1. Polar representations very often play an important and special role in geometric questions concern- ing representations (cf. [PT88, BCO03]), and the class investigated in this paper consists of closest relatives of polar representations. On the other hand, any such quotient has positive curvature and all geodesics in the quotient are closed. Any of these two properties is extremely interesting and in both classes the number of known manifold examples is very limited (cf. [Zil12, Bes78]). We have hoped to obtain new examples of positively curved manifolds and of manifolds with closed geodesics as universal orbi-covering of such spaces. Should the orbifolds be bad one could still hope to obtain new examples of interesting orbifolds. -

Classification of Convex Ancient Solutions to Curve Shortening Flow on the Sphere
UC San Diego UC San Diego Electronic Theses and Dissertations Title Classification of Convex Ancient Solutions to Curve Shortening Flow on the Sphere Permalink https://escholarship.org/uc/item/7gt6c9nw Author Louie, Janelle Publication Date 2014 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA, SAN DIEGO Classification of Convex Ancient Solutions to Curve Shortening Flow on the Sphere A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Mathematics by Janelle Louie Committee in charge: Professor Bennett Chow, Chair Professor Kenneth Intriligator Professor Elizabeth Jenkins Professor Lei Ni Professor Jeffrey Rabin 2014 Copyright Janelle Louie, 2014 All rights reserved. The dissertation of Janelle Louie is approved, and it is ac- ceptable in quality and form for publication on microfilm and electronically: Chair University of California, San Diego 2014 iii TABLE OF CONTENTS Signature Page.................................. iii Table of Contents................................. iv List of Figures..................................v Acknowledgements................................ vi Vita........................................ vii Abstract of the Dissertation........................... viii Chapter 1 Introduction............................1 1.1 Previous work and background...............2 1.2 Results and outline of the thesis..............4 Chapter 2 Preliminaries...........................6 2.1 -

Isoptics of a Closed Strictly Convex Curve. - II Rendiconti Del Seminario Matematico Della Università Di Padova, Tome 96 (1996), P
RENDICONTI del SEMINARIO MATEMATICO della UNIVERSITÀ DI PADOVA W. CIESLAK´ A. MIERNOWSKI W. MOZGAWA Isoptics of a closed strictly convex curve. - II Rendiconti del Seminario Matematico della Università di Padova, tome 96 (1996), p. 37-49 <http://www.numdam.org/item?id=RSMUP_1996__96__37_0> © Rendiconti del Seminario Matematico della Università di Padova, 1996, tous droits réservés. L’accès aux archives de la revue « Rendiconti del Seminario Matematico della Università di Padova » (http://rendiconti.math.unipd.it/) implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit conte- nir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Isoptics of a Closed Strictly Convex Curve. - II. W. CIE015BLAK (*) - A. MIERNOWSKI (**) - W. MOZGAWA(**) 1. - Introduction. ’ This article is concerned with some geometric properties of isoptics which complete and deepen the results obtained in our earlier paper [3]. We therefore begin by recalling the basic notions and necessary results concerning isoptics. An a-isoptic Ca of a plane, closed, convex curve C consists of those points in the plane from which the curve is seen under the fixed angle .7r - a. We shall denote by C the set of all plane, closed, strictly convex curves. Choose an element C and a coordinate system with the ori- gin 0 in the interior of C. Let p(t), t E [ 0, 2~c], denote the support func- tion of the curve C. -

Geometrization of Three-Dimensional Orbifolds Via Ricci Flow
GEOMETRIZATION OF THREE-DIMENSIONAL ORBIFOLDS VIA RICCI FLOW BRUCE KLEINER AND JOHN LOTT Abstract. A three-dimensional closed orientable orbifold (with no bad suborbifolds) is known to have a geometric decomposition from work of Perelman [50, 51] in the manifold case, along with earlier work of Boileau-Leeb-Porti [4], Boileau-Maillot-Porti [5], Boileau- Porti [6], Cooper-Hodgson-Kerckhoff [19] and Thurston [59]. We give a new, logically independent, unified proof of the geometrization of orbifolds, using Ricci flow. Along the way we develop some tools for the geometry of orbifolds that may be of independent interest. Contents 1. Introduction 3 1.1. Orbifolds and geometrization 3 1.2. Discussion of the proof 3 1.3. Organization of the paper 4 1.4. Acknowledgements 5 2. Orbifold topology and geometry 5 2.1. Differential topology of orbifolds 5 2.2. Universal cover and fundamental group 10 2.3. Low-dimensional orbifolds 12 2.4. Seifert 3-orbifolds 17 2.5. Riemannian geometry of orbifolds 17 2.6. Critical point theory for distance functions 20 2.7. Smoothing functions 21 3. Noncompact nonnegatively curved orbifolds 22 3.1. Splitting theorem 23 3.2. Cheeger-Gromoll-type theorem 23 3.3. Ruling out tight necks in nonnegatively curved orbifolds 25 3.4. Nonnegatively curved 2-orbifolds 27 Date: May 28, 2014. Research supported by NSF grants DMS-0903076 and DMS-1007508. 1 2 BRUCE KLEINER AND JOHN LOTT 3.5. Noncompact nonnegatively curved 3-orbifolds 27 3.6. 2-dimensional nonnegatively curved orbifolds that are pointed Gromov- Hausdorff close to an interval 28 4. -
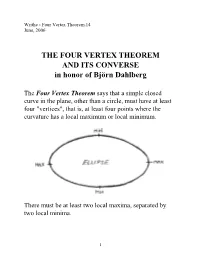
Writhe - Four Vertex Theorem.14 June, 2006
Writhe - Four Vertex Theorem.14 June, 2006 THE FOUR VERTEX THEOREM AND ITS CONVERSE in honor of Björn Dahlberg The Four Vertex Theorem says that a simple closed curve in the plane, other than a circle, must have at least four "vertices", that is, at least four points where the curvature has a local maximum or local minimum. There must be at least two local maxima, separated by two local minima. 1 The Converse to the Four Vertex Theorem says that any continuous real-valued function on the circle which has at least two local maxima and two local minima is the curvature function of a simple closed curve in the plane. Preassign curvature ..... then find the curve That is, given such a function κ defined on the circle S1 , 1 2 there is an embedding α: S → R whose image has 1 curvature κ(t) at the point α(t) for all t ∊ S . 2 History. In 1909, the Indian mathematician S. Mukhopadhyaya proved the Four Vertex Theorem for strictly convex curves in the plane. Syamadas Mukhopadhyaya (1866 - 1937) 3 In 1912, the German mathematician Adolf Kneser proved it for all simple closed curves in the plane, not just the strictly convex ones. Adolf Kneser (1862 - 1930) In 1971, we proved the converse for strictly positive preassigned curvature, as a special case of a general result about the existence of embeddings of Sn into Rn+1 with strictly positive preassigned Gaussian curvature. 4 In 1997, the Swedish mathematician Björn Dahlberg proved the full converse to the Four Vertex Theorem without the restriction that the curvature be strictly positive. -

NOTES for MATH 5510, FALL 2017, V 0 1. Metric Spaces 1 1.1
NOTES FOR MATH 5510, FALL 2017, V 0 DOMINGO TOLEDO CONTENTS 1. Metric Spaces 1 1.1. Examples of metric spaces 1 1.2. Constructions of Metric Spaces 15 1.3. Limits 16 1.4. Maps Between Metric Spaces 18 1.5. Equivalences Between Metric Spaces 20 2. Groups of Isometries 24 2.1. Isometries of Euclidean Space 25 2.2. The Euclidean and Orthogonal Groups 32 2.3. The Euclidean Group in 2 Dimensions 34 2.4. Isometries of the sphere 39 3. Topological Spaces 40 3.1. Topology of Metric Spaces 40 3.2. Topologies and Continuity 45 3.3. Limits 48 3.4. Basis for a Topology 51 3.5. Infinite Products 55 3.6. The Cantor Set 58 4. Subspaces and Quotient Spaces 60 4.1. The Subspace Topology 61 4.2. Compact Spaces 62 4.3. The Quotient Topology 65 Date: July 23, 2017. 1 2 TOLEDO 4.4. Surfaces as Identification Spaces 70 5. Connected Spaces 74 5.1. Connected Components 79 5.2. Locally Path Connected Spaces 81 5.3. Existence Theorems 83 6. Smooth Surfaces 87 6.1. Smooth maps involving surfaces 95 6.2. Smooth surfaces in R3 as metric spaces 97 6.3. Geodesics 100 6.4. A First Glance at Gaussian Curvature 112 6.5. A Quick Glance at Intrinsic Geometry 114 References 115 1. METRIC SPACES The following definition introduces the most central concept in the course. Think of the plane with its usual distance function as you read the definition. Definition 1.1. A metric space (X; d) is a non-empty set X and a function d : X × X ! R satisfying (1) For all x; y 2 X, d(x; y) ≥ 0 and d(x; y) = 0 if and only if x = y. -

On the Projective Centres of Convex Curves
ON THE PROJECTIVE CENTRES OF CONVEX CURVES PAUL KELLY AND E. G. STRAUS 1. Introduction, We consider a closed curve C in the projective plane and the projective involutions which map C into itself. Any such mapping 7, other than the identity, is a harmonic homology whose axis rj we call a pro jective axis of C and whose centre p we call an interior or exterior projective centre according as it is inside or outside C.1 The involutions are the generators of a group T, and the set of centres and the set of axes are invariant under T. The present paper is concerned with the type of centre sets which can exist and with the relationship between the nature of C and its centre set. If C is a conic, then every point which is not on C is a projective centre. Conversely, it was shown by Kojima (4) that if C has a chord of interior centres, or a full line of exterior centres, then C is a conic. Kojima's results, and in fact all the problems considered here, have interpretations in Hilbert geometries. If C is convex and x and y are points interior to C, then the line 77 = x X y cuts C in points a and b, and the Hilbert distance defined by h(xy y) = J log R (a, b;x>y)\ induces a metric on the interior of C. An involution 4> leaving C invariant preserves this distance and hence is a motion of the Hilbert plane onto itself.