Design and Development of an Ultrasonic Power Transfer System for Active Implanted Medical Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Switched-Mode Power Supply - Wikipedia, the Free Encyclopedia
Switched-mode power supply - Wikipedia, the free encyclopedia Log in / create account Article Discussion Read Edit Switched-mode power supply From Wikipedia, the free encyclopedia For other uses, see Switch (disambiguation). Navigation A switched-mode power supply (switching-mode Main page power supply, SMPS, or simply switcher) is an Contents electronic power supply that incorporates a switching Featured content regulator in order to be highly efficient in the Current events conversion of electrical power. Like other types of Random article power supplies, an SMPS transfers power from a Donate to Wikipedia source like the electrical power grid to a load (e.g., a personal computer) while converting voltage and Interaction current characteristics. An SMPS is usually employed to efficiently provide a regulated output voltage, Help typically at a level different from the input voltage. About Wikipedia Unlike a linear power supply, the pass transistor of a Community portal switching mode supply switches very quickly (typically Recent changes between 50 kHz and 1 MHz) between full-on and full- Interior view of an ATX SMPS: below Contact Wikipedia off states, which minimizes wasted energy. Voltage A: input EMI filtering; A: bridge rectifier; regulation is provided by varying the ratio of on to off B: input filter capacitors; Toolbox time. In contrast, a linear power supply must dissipate Between B and C: primary side heat sink; the excess voltage to regulate the output. This higher C: transformer; What links here Between C and D: secondary side heat sink; efficiency is the chief advantage of a switched-mode Related changes D: output filter coil; power supply. -

Efficient Power Conversion Interface Circuits for Energy Harvesting
AN ABSTRACT OF THE THESIS OF Triet T. Le for the degree of Doctor of Philosophy in Electrical and Computer Engineering presented on February 19, 2008. Title: Efficient Power Conversion Interface Circuits for Energy Harvesting Applications Abstract approved: Terri S. Fiez Karti Mayaram Harvesting energy from the environment for powering micro-power devices have been increasing in popularity. These types of devices can be used in embed- ded applications or in sensor networks where battery replacement is impractical. In this dissertation, different methods of energy harvesting from the environment are explored as alternative sources of energy for devices. Some of the most pop- ular energy extraction used in electronic devices today are radio frequency (RF) and thermal/vibrational energy extraction. This dissertation presents novel power techniques that enable some of the most efficient power conversion circuits pub- lished to date. New power conversion circuits to interface to a piezoelectric micro-power generator that produces electrical energy from temperature differences have been fabricated and tested. Circuit designs and measurement results are presented for a half-wave synchronous rectifier with voltage doubler, a full-wave synchronous rectifier and a passive full-wave rectifier circuit. The active rectifier based on synchronous rectification, fabricated in a 0.25-μm CMOS process, is 86% efficient with 22-μW peak output power when connected to the piezoelectric micro-power generator. This gives the highest efficiency to date for active rectification circuits at the micro-power level. The passive rectifier circuit is 66% efficient with 16-μW peak output power and requires no quiescent current to operate. -

Proposed Improvements to the Neutral Beam Injector Power Supply System
ABSTRACT PROPOSED IMPROVEMENTS TO THE NEUTRAL BEAM INJECTOR POWER SUPPLY SYSTEM by Zhen Jiang The tokamak fusion reactor is one of the most promising and well-developed designs for fusion energy production. Scientists around the world use tokamaks to research methods of generating electrical energy from the fusion reaction. Furthermore, efforts are now underway to design a new large sized tokamak, Chinese Fusion Engineering Test Reactor (CFETR), with the aim of demonstrating fusion energy as a viable source of power. As this project is just beginning, it is necessary to evaluate new and emerging technologies that can be used in this endeavor. Power electronics play a crucial role in fusion energy research and are the focus of the thesis. The High Power, Power Supplies (HPPS) transforms electrical energy from the grid into AC and DC signals with extremely high voltage and current magnitudes. For example, the Neutral Beam Injectors (NBI) require a power source that is capable of generating 110 kVDC at nearly 10 MW. This thesis evaluates two new types of technology for use in the NBI power supply; the utilization of new semiconductor switching devices and the application of new circuit topologies. The switching devices used in the existing HPPS all utilize silicon based semiconductors. Within the last ten years, new devices created from Wide Bandgap (WBG) semiconductors have become commercially available. This thesis demonstrates that gains in efficiency are possible by utilizing WBG based power devices in the NBI power supply. It also explores the application of a Modular Multilevel Converters (MMC) as a replacement to the existing topology used in the NBI power supply. -

Receiver Side Control for Efficient Inductive Power Transfer for Vehicle Recharging
Receiver Side Control for Efficient Inductive Power Transfer for Vehicle Recharging Mohammadhossein Afshin A Thesis In the Department of Electrical and Computer Engineering Presented in Partial Fulfillment of the Requirements For the Degree of Master of Applied Science (Electrical & Computer Engineering) at Concordia University Montreal, Quebec, Canada. February 2018 © Mohammadhossein Afshin, 2018 CONCORDIA UNIVERSITY SCHOOL OF GRADUATE STUDIES This is to certify that the thesis prepared By: Mohammadhossein Afshin Entitled: Receiver Side Control for Efficient Inductive Power Transfer for Vehicle Recharging and submitted in partial fulfillment of the requirements for the degree of Master of Applied Science Complies with the regulations of this University and meets the accepted standards with respect to originality and quality. Signed by the final examining committee: Chair Dr. D. Qiu Examiner, External Dr. C. Alecsandru To the Program Examiner Dr. M.Z. Kabir Supervisor Dr. A.Rathore Approved by: Dr. W. E. Lynch, Chair Department of Electrical and Computer Engineering 20 Dr. Amir Asif, Dean Faculty of Engineering and Computer Science ABSTRACT This thesis presents a new wireless inductive power transfer topology using half bridge current fed converter and a full bridge active single phase rectifier. Generally, the efficiency of inductive power transfer system is lower than the wired system due to higher power loss in inductive power transfer coils. The proposed converter reduces these limitations and shows more than 4% overall efficiency improvement comparing with such system in battery charging of low-voltage light-load electrical vehicles such as passenger cars, golf carts etc. This is realized by synchronous rectification technique of the vehicle side converter. -

High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems
UNIVERSITÉ DE MONTRÉAL High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems SEYED SAEID HASHEMI AGHCHEH BODY DÉPARTEMENT DE GÉNIE ÉLECTRIQUE ÉCOLE POLYTECHNIQUE DE MONTRÉAL THÉSE PRÉSENTÉE EN VUE DE L’OBTENTION DU DIPLÔME DE PHILOSOPHIAE DOCTOR (PH.D.) (GÉNIE ÉLECTRIQUE) AOȖT 2011 © Seyed Saeid Hashemi Aghcheh Body, 2011. UNIVERSITÉ DE MONTRÉAL ÉCOLE POLYTECHNIQUE DE MONTRÉAL Cette Thèse intitulée: High-Efficiency Low-Voltage Rectifiers for Power Scavenging Systems Présentée par : HASHEMI AGHCHEH BODY Seyed Saeid en vue de l’obtention du diplôme de : Philosophiae Doctor a été dûment accepté par le jury d’examen constitué de : M. AUDET Yves, Ph. D., président M. SAWAN Mohamad, Ph. D., membre et directeur de recherche M. SAVARIA Yvon, Ph. D., membre et codirecteur de recherche M. BRAULT Jean-Jules, Ph. D., membre M. SHAMS Maitham, Ph. D., membre externe iii DEDICATION Dedicated to my parents And To my wife and sons iv ACKNOWLEDGEMENTS My thanks are due, first and foremost, to my supervisor, Professor Mohamad Sawan, for his patient guidance and support during my long journey at École Polytechnique de Montréal. It was both an honor and a privilege to work with him. His many years of circuit design experience in biomedical applications have allowed me to focus on the critical and interesting issues. I would like to also thank Professor Yvon Savaria, whom I enjoyed the hours of friendly and stimulating t echnical di scussions. H is i nsightful c omments, s upport, a nd t imely advice w as instrumental throughout the course of this work. He has been an invaluable source of help for my thesis and all the other submitted papers for publication. -

IEEE Paper Template in A4
International Journal of Engineering Research and Development e-ISSN: 2278-067X, p-ISSN: 2278-800X, www.ijerd.com Volume 10, Issue 4 (April 2014), PP.35-42 Design of DSP Base Controlled Power Supply on Synchronous Rectifier Kishori V. Sangani1, Vinod P. Patel2, Sunil B. Bhatt3 1,3B. H. Gardi College of Engg. & Technology, Rajkot, India. 2 AMTECH Electronics (I) Ltd, Gandhinagar, India. Abstract:- Synchronous rectification is a commonly used technique to improve the efficiency of DC/DC converters with low (30V) output voltages and high output currents. Use of a synchronous rectifier in place of diode bridge rectifier because in low voltage application the conduction losses of diode bridge contributes significantly to the overall power loss in a power supply compared to synchronous rectifier. Control of the synchronous rectifiers in forward converters has been accomplished in many different ways, from self-driven to complexly controlled techniques. Most existing control techniques allow the synchronous rectifier’s body diode to conduct for some small time interval, thus degrading efficiency. In this synchronous rectifier the PWM techniques are used so the power switches are switched at high frequency which is reduce the size of transformer and overall size, weight and cost. The AC/DC converters called also PWM rectifiers provide synchronous rectification or active filtering improving electrical power quality. The design process of the PWM (pulse width modulation) rectifier has been described. The practical realization of the voltage and current sensors as well as control electronics and the protection systems has been presented. Voltage Oriented Control has been implemented into the DSP to control the synchronous rectifier. -
Designideas Edited by Bill Travis Oscillating Output Improves System Security Jorge Marcos and Ana Gómez, University of Vigo, Vigo, Spain
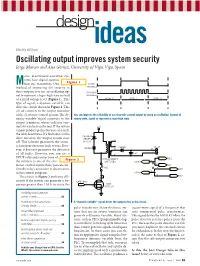
designideas Edited by Bill Travis Oscillating output improves system security Jorge Marcos and Ana Gómez, University of Vigo, Vigo, Spain any electronic-control sys- tems have digital outputs Figure 1 Mthat use transistors. One STATIC method of improving the security in VARIABLE these outputs is to use an oscillating sig- DYNAMIC nal to represent a logic-high state instead VARIABLE of a fixed voltage level (Figure 1). This LEVEL 0 LEVEL 1 LEVEL 0 type of signal, a dynamic variable, can drive the circuit shown in Figure 2. This circuit connects to the output transistor of the electronic-control system. The dy- You can improve the reliability of an electronic-control output by using an oscillating, instead of namic-variable signal connects to the steady-state, signal to represent a logic-high state. output transistor, whose collector con- nects to a pulse transformer. If the system 24V cannot produce pulses because of a fault, the relay deactivates. If a fault exists in the drive circuitry, the output system stays 1N5347B ZENER 3 V ϭ10V off. This solution guarantees the securi- Z 1 4 ty function when one fault occurs. How- 1N4002 RELAY ever, it does not guarantee the detection 1N4002 5 16 2 1 F 1 of all faults. However, you can use a 6 DPDT relay and connect one of 9 Figure 2 TRANSFORMER NO1 the contacts to one of the elec- SKPT25B3 COM1 13 tronic-control inputs; thus, you can con- 11 NC1 FUSE 8 firm the relay’s activation or deactivation NO2 4 in the control program. -

Exclusive Technology Feature Developing a 25-Kw Sic-Based
Exclusive Technology Feature ISSUE: June 2021 Developing A 25-kW SiC-Based Fast DC Charger (Part 3): PFC Stage Simulation by Oriol Filló, Karol Rendek, Stefan Kosterec, Daniel Pruna, Dionisis Voglitsis, Rachit Kumar and Ali Husain, ON Semiconductor, Phoenix, Ariz. In the previous installments in this series,[1,2] we introduced the main system requirements for a fast EV charger, outlined the key stages of the development process for such a charger and met the team of application engineers responsible for this design. Now, it is time to dive deeper into the design process of the 25-kW EV charger. In parts 1 and 2, we discussed the motivations, specifications and topologies chosen. In this part, we will walk through the simulations of the ac-dc conversion stage, also described previously as the three-phase active rectification front-end, and referred to here more simply as the PFC stage. As discussed in the first part, power simulations assist in validating assumptions before designing or building hardware and help uncover possible issues or behaviors to be considered in the design and selection of components, PCB layout and even in the test procedures as we will see. For example, simulation allows us to test assumptions about working voltages, currents, switching frequency, power dissipation (losses), cooling requirements and control algorithm. Beyond verification, the outcome of the simulation serves to address other important steps in the development process such as selection of passive components. A solid simulation reduces debugging and hardware iterations in the development cycle, accelerating the product development. Before Clicking “Run”—Preparing The Simulation Power simulations do not begin with the click of the Run button—they start way before. -

Application Note Please Read the Important Notice and Warnings at the End of This Document V 1.0 2017-09-01
AN_201708_PL52_025 High-efficiency 3 kW bridgeless dual-boost PFC demo board 90 kHz digital control design based on 650 V CoolMOS™ C7 in TO-247 4- pin Author: Rafael A. Garcia Mora About this document Scope and purpose This document presents design considerations and results from testing a 3000 W 90 kHz power factor correction (PFC) bridgeless dual-boost converter with a peak efficiency higher than 98.5 percent, based on: 650 V CoolMOS™ C7 superjunction MOSFET in both TO-247 4-pin configuration for the high frequency PFC MOSFETs, and standard TO-247 configuration for the AC-line frequency active-rectification MOSFETs CoolSiC™ Schottky diode 650 V G5 EiceDRIVER™ 1EDI60N12AF isolated gate driver EiceDRIVER™ 2EDN7524F non-isolated gate driver XMC 1300 microcontroller ICE2QR4780Z flyback controller Intended audience This document is intended for design engineers who want to verify the performance of the 650 V CoolMOS™ C7 TO-247 4-pin MOSFET technology working at 90 kHz in a dual-boost PFC boost converter along with EiceDRIVER™ ICs and CoolSiC™ Schottky diode 650 V G5 using digital control based on the XMC 1300 microcontroller. Table of contents About this document ....................................................................................................................... 1 Table of contents ............................................................................................................................ 1 1 Summary of the 3 kW bridgeless dual-boost PFC demo board ..................................................... -

Comparison of Power Quality Solutions Using Active and Passive Rectification for More Electric Aircraft
25TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES COMPARISON OF POWER QUALITY SOLUTIONS USING ACTIVE AND PASSIVE RECTIFICATION FOR MORE ELECTRIC AIRCRAFT Bulent Sarlioglu, Ph.D. Honeywell Aerospace, Electric Power Systems Torrance, California USA [email protected] Abstract The introduction of variable frequency distribution system on commercial aircraft This paper presents various three phase active results in the elimination of a mechanical and passive rectification schemes and compares interface device for variable ratio transmission them for more electric aircraft applications. that is positioned between the main engine and The passive topologies involve multi-pulse the ac electric generator. The ac electric transformer rectification systems while the generator can now be directly coupled to the active topologies look into active rectification. main engine output shaft via a gearbox. The Passive rectification systems are to be used for effect of such direct coupling is an ac bus the ac-to-dc conversion that comprises the first frequency proportional to the engine speed stage of the ac-to-ac conversion for applications (which can vary over a 2:1 range depending on such as motor drives in aircraft systems. application), while the magnitude of the ac bus Particular emphases are given to comparison of voltage is regulated to a constant value via a dc bus regulation, electromagnetic interface generator control unit (GCU) for the generation (EMI) filtering, current harmonic cancellation, system. power factor, size, weight, cost and reliability With such a distribution system, it is still among the schemes. Results are summarized possible to connect induction motors directly to qualitatively in a table. -

Silicon Carbide Devices in High Efficiency DC-DC Power
Silicon Carbide Devices in High Efficiency DC-DC Power Converters for Telecommunications Rory Brendan Shillington A thesis submitted for the degree of Doctor of Philosophy In Electrical and Electronic Engineering at the University of Canterbury, Christchurch, New Zealand. 2012 - ii - Abstract The electrical efficiency of telecommunication power supplies is increasing to meet customer demands for lower total cost of ownership. Increased capital cost can now be justified if it enables sufficiently large energy savings, allowing the use of topologies and devices previously considered unnecessarily complex or expensive. Silicon carbide Schottky diodes have already been incorporated into commercial power supplies as expensive, but energy saving components. This thesis pursues the next step of considering silicon carbide transistors for use in telecommunications power converters. A range of silicon carbide transistors was considered with a primary focus on recently developed, normally-off, junction field effect transistors. Tests were devised and performed to uncover a number of previously unpublished characteristics of normally-off silicon carbide JFETs. Specifically, unique reverse conduction and associated gate current draw relationships were measured as well as the ability to block small reverse voltages when a negative gate-source voltage is applied. Reverse recovery-like characteristics were also measured and found to be superior to those of silicon MOSFETs. These characteristics significantly impact the steps that are required to maximize efficiency with normally-off SiC JFETs in circuits where synchronous rectification or bidirectional blocking is performed. A gate drive circuit was proposed that combines a number of recommendations to achieve rapid and efficient switching of normally-off SiC JFETs. Specifically, a low transient output impedance was provided to achieve rapid turn-on and turn-off transitions as well as a high dc output impedance to limit the steady state drive current while sustaining the turned-on state. -

Advanced Electrified Automotive Powertrain with Composite DC-DC
Advanced electrified automotive powertrain with composite DC-DC converter by Hua Chen B.Eng., The Chinese University of Hong Kong, 2010 M.S., University of Colorado Boulder, 2014 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Doctor of Philosophy Department of Electrical, Computer, and Energy Engineering 2016 This thesis entitled: Advanced electrified automotive powertrain with composite DC-DC converter written by Hua Chen has been approved for the Department of Electrical, Computer, and Energy Engineering Prof. Robert Erickson Prof. Dragan Maksimovic Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Chen, Hua (Ph.D., ECEE) Advanced electrified automotive powertrain with composite DC-DC converter Thesis directed by Prof. Robert Erickson In an electric vehicle powertrain, a boost dc-dc converter enables size reduction of the electric machine and optimization of the battery system. Design of the powertrain boost converter is challenging because the converter must be rated at high peak power, while efficiency at medium to light load is critical for the vehicle system performance. The previously proposed efficiency improvement approaches only offer limited improvements in size, cost and efficiency trade-offs. In this work, the concept of composite converter architectures is proposed. By emphasizing the direct / indirect power path explicitly, this approach addresses all dominant loss mechanisms, resulting in fundamental efficiency improvements over wide ranges of operating conditions.