Motion Planning and Feedback Control for Bipedal Robots Riding a Snakeboard
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Travelling Light.Pdf
FEATURE TRAVELLING LIGHT n a cycling holiday less really is more. used for touring. Carradice saddlebags, usually attached Not because you can ride more miles by an SQR fitting to a seatpost, were the choice for most in a day (although you can) but of our lightweight tipsters. The weight is held so close because the less you carry the easier to the saddle that it has little more effect upon handling the cycling becomes, allowing more than a heavier rider might. The ‘longflap’ design allows Otime and attention to be given to what you’ve come this the bag to expand for extra capacity. Also note the loops way to see. by which additional loads can be strapped on top. Have we lost the art of travelling light? Old CTC If you can’t manage to squeeze your load into a Gazettes show riders touring with no more than a saddlebag, try two front or universal panniers attached saddlebag, whereas the modern tourist is likely to have to the rear rack. I’d always add a handlebar bag too, four bulging panniers or even a trailer! I’m as guilty as to keep my camera handy and all valuables safe on the next man of excess cycling baggage, but we’ve had my shoulder when it’s parked. The Ortlieb Compact loads of great tips from CTC members, many of which handlebar bag is small enough to travel light and will I’ve incorporated into this article – with the rest on our also keep those valuables dry. I shorten the shoulder website. -

Fitness Tests to Predict Vo2max
Prediction Tests Tests For Predicting VO2max Maximal Tests 1.5 Mile Run. Test Population. This test was developed on college age males and females. It has not been validated on other age groups. Test Procedures. A 1.5 mile level running surface is used. The 1.5 miles is covered in as fast a time as possible. It is best to run at an even pace until near the end, just as in a race. It is best to have at least one trial run before the test to establish a pace-sense for this distance. Only the time for the run, in minutes and seconds and the heart rate at the end of the test is recorded. VO2max is computed with the following equation: . -1. -1 VO2max (ml kg min ) = 88.02 + (3.716 * gender) - (0.0753 * body weight in pounds) - (2.767 * time for 1.5 miles in minutes and fractions of minutes) Where gender = 1 for males and 0 for females. Accuracy of Prediction. This test has a R = 0.90 and an SEE = 2.8 ml.kg-1.min-1. Reference: George, J. D. et al. VO2max estimation from a submaximal 1-mile track jog for fit college-age individuals. Medicine and Science in Sports and Exercise, 25, 401-406, 1993. Prediction Tests Storer Maximal Bicycle Test Test Population. Healthy but sedentary males and females age 20-70 years. Test Procedures. This is a maximal test. You should try as hard as possible. Perform this test on one of the new upright bicycles in the WRC (the newer bikes are the 95 CI). -

Selinda Adventure Trail Northern Botswana
FACT FILE SELINDA ADVENTURE TRAIL NORTHERN BOTSWANA A TRAILS EXPLORATION – 4 NIghTS / 5 dAyS AdVENTURE SAFARI ALONg ThE SELINdA SPILLwAy OFFERINg EIThER A cANOEINg ANd wALkINg AdVENTURE OR PURE-wALkINg safari EXPERIENcE The high waters flowing through northern Botswana in 2009, together with subtle tectonic movements, caused the waters of the Okavango River to flow in a way that it has not done for nearly three decades, pushing east along the previously dry Selinda Spillway to meet the waters of the Linyanti. This enabled adventurers the opportunity to experience a rare first, canoeing along the Selinda Spillway. As the waters of the Selinda Spillway ebb and flow each year, some years with higher flood levels than others, so the name of the Selinda Canoe Trail was changed to reflect a more inclusive guided walking safari and is thus now known as the Selinda Adventure Trail. The trail replicates the safari experiences of old as we chart a course along the Selinda Spillway and into the remote woodlands of the vast 320,000 Selinda Reserve over five days. As we are governed by the availbility of sufficient water in the Selinda Spillway, we offer two distinct adventures here for you to enjoy. depending on water levels at the time of a your arrival, we will offer either a canoeing and walking experience, or a purely guided walking experience. The canoeing experience entails a traditional canoe and walking safari following the course, and exploring side channels, of the Selinda Spillway. The pure-walking experience is an amazing, exclusively guided walking safari along exciting sections of the Spillway and inland portions of the famous Selinda Reserve. -
Skateboarding
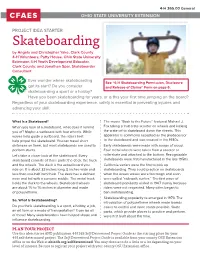
4-H 365.00 General OHIO STATE UNIVERSITY EXTENSION PROJECT IDEA STARTER Skateboarding by Angela and Christopher Yake, Clark County 4-H Volunteers; Patty House, Ohio State University Extension 4-H Youth Development Educator, Clark County; and Jonathan Spar, Skateboarder Consultant Ever wonder where skateboarding See “4-H Skateboarding Permission, Disclosure got its start? Do you consider and Release of Claims” Form on page 6. skateboarding a sport or a hobby? Have you been skateboarding for years, or is this your first time jumping on the board? Regardless of your skateboarding experience, safety is essential in preventing injuries and advancing your skill. What Is a Skateboard? The movie “Back to the Future” featured Michael J. When you look at a skateboard, what does it remind Fox taking a fruit crate scooter on wheels and kicking you of? Maybe a surfboard with four wheels. While the crate off to skateboard down the streets. This waves help guide a surfboard, the rider’s feet apparatus is commonly accepted as the predecessor help propel the skateboard. You can travel short to the skateboard and was created in the 1930s. distances on them, but most skateboards are used to Early skateboards were made with scraps of wood. perform stunts. Four metal wheels were taken from a scooter or Let’s take a closer look at the skateboard. Every rollerskate and attached to the bottom. Recognizable skateboard consists of three parts: the deck, the truck skateboards were first manufactured in the late 1950s. and the wheels. The deck is the actual board you California surfers were the first to pick up ride on. -

Boonsboro Time Trial Event Start Distance/Laps Prize Placing Para-Cyclists 7:00Am 16 Kilometers TBD TBD Women’S Open 16 Kilometers 3 Places *Women’S Cat
Welcome to the 2015 Tour of Washington County! Antietam Velo Club and the rest of our event sponsors would like to take this opportunity to welcome you to the 2015 Meritus Health Tour of Washington County Power by SRAM This is event is being brought to you through the support of the Meritus Health, The Hagerstown - Washington County Convention & Visitors Bureau, the City of Hagerstown and the Washington County Commissioners, Hagerstown City Police Department along with Washington County Sheriffs and Washington County Volunteer Fire Police collaborative support of many Antietam Velo Club members. Our goal is to bring exposure to various parts of Washington County, MD. Our expectation is that you will visit some of the local sites and many restaurants, during your stay. Ultimately we hope to grow the sport of competitive cycling while at the same time using cycling as a health alternative form of exercise. The being said, we wish to thank you for your support of this event and our team. So welcome to Washington County and have a great race. More importantly have a great stay. Joseph Jefferson President of Antietam Velo Club Photo Courtesy Kevin Dillard Table of Contents General Race Information………………………………………………………………………………Page 4 General Technical Information…………………………………………………………………………Page 5 Race Flyer…………….…….…………………………………………………………………………….Page 7 Stage One Information…………………………………………………………………………………..Page 8 Stage Two Information…………………………………………………………………………………..Page 10 Stage Three Information….……………………………………………………………………………..Page 11 Image -

Coldwater Creek Paddling Guide
F ll o r ii d a D e s ii g n a tt e d P a d d ll ii n g T r a ii ll s ¯ Mount Carmel % % C o ll d w a ttSRe«¬ 8r9 C r e e k Jay % «¬4 Berrydale C% o ll d w a tt e rr C rr e e k P a d d ll ii n g T rr a ii ll M a p 1 % CR 164 87 Munson «¬ % New York % CR 178 1 89 9 «¬ 1 R C o ll d w a tt e rr C rr e e k C P a d d ll ii n g T rr a ii ll M a p 2 CR 182 Allentown % SANTA ROSA 7 9 1 R C C R 1 91 Harold % CR 184A Milton 10 % ¨¦§ ¤£90 Designated Paddling Trail Pace % % Wetlands «¬281 Water 0 2 4 8 Miles Designated Paddling Trail Index % C o ll d w a tt e r C r e e k P a d d ll ii n g T r a ii ll M a p 1 «¬87 Berrydale ¯ «¬4 WHITFIELD RD !| Access Point 1: SR 4 Bridge N: 30.8822 W: -86.9582 FRIENDSHIP RD G O R D O N L Blackwater River State Forest A N D R SANTA ROSA D !|I* !9 Þ Access Point 2: Coldwater Recreation Area N: 30.8469 W: -86.9839 D R S I W E L Coldwater River !9 Camping !| Canoe/Kayak Launch Restrooms SP I* RI NG Þ H Potable Water ILL R D Florida Conservation Lands 0 0.5 1 2 Miles Wetlands C o ll d w a tt e rr C rr e e k P a d d ll ii n g T rr a ii ll M a p 2 Blackwater River ¯ State Forest SP RINGHILL RD D R S E N R A B L U A P «¬87 TOMAHAWK LANDING RD ALL D ENTOWN RD %Allentown R E G Þ D I !| I* !9 R B L E E T S Access Point 3: Adventures Unlimited N: 30.7603 W: -86.9954 SANTA ROSA !| Access Point 4: Old Steel Bridge N: 30.7432 W: -86.9839 W H I T I N G Y F I W E H L N Naval Air Station Whiting Field D O S C N I U R M 191 «¬ I Access Point 5: SR 191 Launch N D I Coldwater River N: 30.7098 W: -86.9727 A N E !| F A ANGLEY ST O !9 CamLping S R T D G A Canoe/Kayak Launch R !| T D E Restrooms R I* D Þ Potable Water Florida Conservation Lands Blackwater Heritage 0 0.5 1 2 Miles Wetlands State Trail Coldwater River Paddling Trail Guide The Waterway Flowing through the Blackwater River State Forest, Coldwater Creek has some of the swiftest water in Florida. -

THE IMPORTANCE of SINGLETRACK from the International Mountain Bicycling Association
THE IMPORTANCE OF SINGLETRACK From the International Mountain Bicycling Association “Mountain biking on singletrack is like skiing in fresh powder, or matching the hatch while fly fishing, or playing golf at Pebble Beach.” —Bill Harris; Montrose, Colorado “On singletrack I meet and talk to lots of hikers and bikers and I don’t do that nearly as much on fire roads. Meeting people on singletrack brings you a little closer to them.” — Ben Marriott; Alberta, Canada INTRODUCTION In recent years mountain bike trail advocates have increasingly needed to defend the legitimacy of bicycling on singletrack trails. As land agencies have moved forward with a variety of recreational planning processes, some officials and citizens have objected to singletrack bicycling, and have suggested that bicyclists should be satisfied with riding on roads – paved and dirt surfaced. This viewpoint misunderstands the nature of mountain bicycling and the desires of bicyclists. Bike riding on narrow, natural surface trails is as old as the bicycle. In its beginning, all bicy- cling was essentially mountain biking, because bicycles predate paved roads. In many historic photographs from the late 19th-century, people are shown riding bicycles on dirt paths. During World War II the Swiss Army outfitted companies of soldiers with bicycles to more quickly travel on narrow trails through mountainous terrain. In the 1970’s, when the first mountain bikes were being fashioned from existing “clunkers,” riders often took their bikes on natural surface routes. When the mass production of mountain bikes started in the early 1980’s, more and more bicyclists found their way into the backcountry on narrow trails. -

MEMORANDUM – JABSOM Skateboard, Bicycle and Surfboard Policy the University Has an Obligation to Provide a Safe Environment An
MEMORANDUM – JABSOM Skateboard, Bicycle and Surfboard Policy The University has an obligation to provide a safe environment and protect University property. JABSOM recognizes that students, faculty, and staff use a variety of means of transportation on campus. Although personal choice is important, JABSOM must consider the safety and well‐being of the campus community and our visitors as well as JABSOM property. Activities that include skateboarding may cause damage to sidewalks. In addition, there is a potential for injury to both the person doing the activity and the public at large. In an effort to balance our concern for community safety and the ability to use these means of transportation, the following policy applies to the use of bicycles and skateboards on campus (policies applicable to skateboards apply to roller‐skates and in‐line skates). Skateboarding, conducted in a reckless manner can be dangerous and presents a safety issue for pedestrians, as well as the skate boarder. Skateboarding has also caused significant damage to benches, walls, steps, curbs, and receptacles around campus. Nevertheless, skateboarding, when good judgment is exercised is an effective means to travel in urban areas. Skateboard (as well as roller skates and rollerblades) and bicycle use on JABSOM premises is allowed. However, it is the person on the skateboard or bicycle that is responsible for avoiding pedestrians and not the other way around. The use of these items, involves an assumption of personal risk. Persons who use them are personally liable for their actions Skateboards and bicycles shall be used solely to convey a person and shall not be used to perform tricks or carryout reckless or risky actions such as riding on ledges or using on steps. -

Bicycles and Cycle-Rickshaws in Asian Cities: Issues and Strategies
76 TRANSPORTATION RESEARCH RECORD 1372 Bicycles and Cycle-Rickshaws in Asian Cities: Issues and Strategies MICHAEL REPLOGLE An overview of the use and impacts of nonmotorized vehicles in for several decades offered employee commuter subsidies for Asian cities is provided. Variations in nonmotorized vehicle use, cyclists, cultivated a domestic bicycle manufacturing industry, economic aspects of nonmotorized vehicles in Asia, and facilities and allocated extensive urban street space to nonmotorized that serve nonmotorized vehicles are discussed, and a reexami nation of street space allocation on the basis of corridor trip length vehicle traffic. This strategy reduced the growth of public distribution and efficiency of street space use is urged. The re transportation subsidies while meeting most mobility needs. lationship between bicycles and public transportation; regulatory, Today, 50 to 80 percent of urban vehicle trips in China are tax, and other policies affecting nonmotorized vehicles; and the by bicycle, and average journey times in China's cities appear influence of land use and transportation investment patterns on to be comparable to those of many other more motorized nonmotorized vehicle use are discussed. Conditions under which Asian cities, with favorable consequences for the environ nonmotorized vehicle use should be encouraged for urban trans ment, petroleum dependency, transportation system costs, portation, obstacles to nonmotorized vehicle development, ac tions that could be taken to foster appropriate use of nonmoto_r and traffic safety. ized vehicles, and research needs are identified. EXTENT OF OWNERSHIP AND USE Nonmotorized vehicles-bicycles, cycle-rickshaws, and carts play a vital role in urban transportation in much of Asia. Bicycles are the predominant type of private vehicle in many Nonmotorized vehicles account for 25 to 80 percent of vehicle Asian cities. -

Port-Based Modeling and Control for Efficient Bipedal Walking Robots
Port-Based Modeling and Control for Efficient Bipedal Walking Robots Vincent Duindam The research described in this thesis has been conducted at the Department of Electrical Engineering, Math, and Computer Science at the University of Twente, and has been financially supported by the European Commission through the project Geometric Network Modeling and Control of Complex Physical Systems (GeoPlex) with reference code IST-2001-34166. The research reported in this thesis is part of the research program of the Dutch Institute of Systems and Control (DISC). The author has succesfully completed the educational program of the Graduate School DISC. ISBN 90-365-2318-4 The cover picture of this thesis is based on the work ’Ascending and Descending’ by Dutch graphic artist M.C. Escher (1898–1972), who, in turn, was inspired by an article by Penrose & Penrose (1958). Copyright c 2006 by V. Duindam, Enschede, The Netherlands No part of this work may be reproduced by print, photocopy, or any other means without the permission in writing from the publisher. Printed by PrintPartners Ipskamp, Enschede, The Netherlands PORT-BASED MODELING AND CONTROL FOR EFFICIENT BIPEDAL WALKING ROBOTS PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Universiteit Twente, op gezag van de rector magnificus, prof. dr. W.H.M. Zijm, volgens besluit van het College voor Promoties in het openbaar te verdedigen op vrijdag 3 maart 2006 om 13.15 uur door Vincent Duindam geboren op 21 oktober 1977 te Leiderdorp, Nederland Dit proefschrift is goedgekeurd door: Prof. dr. ir. S. Stramigioli, promotor Prof. dr. ir. J. van Amerongen, promotor Samenvatting Lopende robots zijn complexe systemen, vanwege hun niet-lineaire dynamica en interactiekrachten met de grond. -

Chapter 430 BICYCLES, SKATEBOARDS and ROLLER SKATES
Chapter 430 BICYCLES, SKATEBOARDS AND ROLLER SKATES § 430.01. Definitions. [Ord. No. 458, passed 2-25-1991; Ord. No. 535, passed 7-8-1996] The following words, when used in this chapter, shall have the following meanings, unless otherwise clearly apparent from the context: (a) BICYCLE — Shall mean any wheeled vehicle propelled by means of chain driven gears using footpower, electrical power or gasoline motor power, except that vehicles defined as "motorcycles" or "mopeds" under the Motor Vehicle Code for the State of Michigan shall not be considered as bicycles under this chapter. This definition shall include, but not be limited to, single-wheeled vehicles, also known as unicycles; two-wheeled vehicles, also known as bicycles; three-wheeled vehicles, also known as tricycles; and any of the above-listed vehicles which may have training wheels or other wheels to assist in the balancing of the vehicle. (b) SKATEBOARD — Shall include any surfboard-like object with wheels attached. "Skateboard" shall also include, under its definition, vehicles commonly referred to as "scooters," being surfboard-like objects with wheels attached and a handle coming up from the forward end of the surfboard area. (c) ROLLER SKATES — Shall include any shoelike device with wheels attached, including, but not limited to, roller skates, in-line roller skates and roller blades. § 430.02. Operation upon certain public ways prohibited; sails and towing prohibited. [Ord. No. 458, passed 2-25-1991; Ord. No. 677, passed 12-8-2003] (a) No person shall ride or in any manner use a skateboard, roller skate or roller skates upon the following public ways: (1) U.S. -
HOBIE KA Y AKING + F I S HING C O Ll EC T
HOBIE KAYAKING + FISHING COLLECTION HOBIE HISTORY 1994 The Hobie Float Cat 1984 marked the company’s The windsurfing scene first cast into angling. was exploding and Hobie contributed 1987 by distributing Alpha Ladies love watersports, 1968 1977 . so Hobie delivered After ample hands-on Seeking all-out speed, Sailboards fashion-forward, R&D, Hobie introduced a the Hobie 18 delivered functional lightweight, beachable serious velocity thrills to women’s . sailing catamaran, the sailors worldwide. swimwear Hobie 14. 1958 Hobie teamed up 1950 with Grubby Clark to Hobie Alter shaped produce the world’s 1994 The Hobie Wave was his first surfboard in first fiberglass-and- designed and crafted his parents’ Laguna foam-core boards, as the perfect, simple, Beach garage. revolutionizing surfing. 1982 rotomolded catamaran. Reading the water is tricky, but Hobie tamed reflected light with its line 1986 Pursuing new ways of polarized sunglasses. to play, Hobie intro- 1966 1974 duced its first kayak, Recognizing that Introduced the the Alpha Wave Ski. people needed Hobie Hawk remote better-quality, sport- controlled glider. specific clothing, Hobie started selling his now-iconic line of sportswear. 1954 1962 Demand for Hobie’s After witnessing the birth boards spiked, so he of skateboarding, Hobie opened his first Surf introduced polyurethane 1970 Shop in Dana Point, skateboard wheels—the Classic. The two-person, 1982 1985 1987 California. sport’s biggest evolution. double-trapeze Hobie 16 The Hobie 33, the The Hobie 17 redefined The Hobie 21 was became an international fastest, sleekest one-person multihulls, bigger, faster, and sensation, instantly sparking monohull in its class.