Expanding Polyhedral Universe in Regge Calculus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Classification of Polyhedral Shapes from Individual Anisotropically
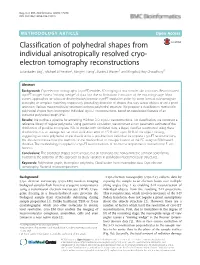
Bag et al. BMC Bioinformatics (2016) 17:234 DOI 10.1186/s12859-016-1107-5 METHODOLOGY ARTICLE Open Access Classification of polyhedral shapes from individual anisotropically resolved cryo- electron tomography reconstructions Sukantadev Bag1, Michael B Prentice2, Mingzhi Liang3, Martin J Warren3 and Kingshuk Roy Choudhury4* Abstract Background: Cryo-electron tomography (cryo-ET) enables 3D imaging of macromolecular structures. Reconstructed cryo-ET images have a “missing wedge” of data loss due to limitations in rotation of the mounting stage. Most current approaches for structure determination improve cryo-ET resolution either by some form of sub-tomogram averaging or template matching, respectively precluding detection of shapes that vary across objects or are a priori unknown. Various macromolecular structures possess polyhedral structure. We propose a classification method for polyhedral shapes from incomplete individual cryo-ET reconstructions, based on topological features of an extracted polyhedral graph (PG). Results: We outline a pipeline for extracting PG from 3-D cryo-ET reconstructions. For classification, we construct a reference library of regular polyhedra. Using geometric simulation, we construct a non-parametric estimate of the distribution of possible incomplete PGs. In studies with simulated data, a Bayes classifier constructed using these distributions has an average test set misclassification error of < 5 % with upto 30 % of the object missing, suggesting accurate polyhedral shape classification is possible from individual incomplete cryo-ET reconstructions. We also demonstrate how the method can be made robust to mis-specification of the PG using an SVM based classifier. The methodology is applied to cryo-ET reconstructions of 30 micro-compartments isolated from E. -

Γ‑Brass Polyhedral Core in Intermetallics: the Nanocluster Model † † ‡ § † ⊥ Arina A
Article pubs.acs.org/IC Terms of Use γ‑Brass Polyhedral Core in Intermetallics: The Nanocluster Model † † ‡ § † ⊥ Arina A. Pankova, Vladislav A. Blatov, , ,* Gregory D. Ilyushin, and Davide M. Proserpio*, , † Samara Center for Theoretical Materials Science (SCTMS), Samara State University, Ac. Pavlov Street 1, Samara 443011, Russia ‡ Chemistry Department, Faculty of Science, King Abdulaziz University, Jeddah 21589, Saudi Arabia § Institute of Crystallography, Russian Academy of Science, Leninsky Prospekt 59, Moscow 117333, Russia ⊥ Dipartimento di Chimica, Universitàdegli Studi di Milano, Via Golgi 19, 20133 Milano, Italy *S Supporting Information ABSTRACT: Using the TOPOS program package, 26-atom γ nanoclusters of the -brass (Cu5Zn8) type (0@4@22 or 0@ 8@18) were found in 5918 crystal structures of cubic inter- metallics. The nanocluster models were built for all the inter- metallics using a recently developed algorithm implemented into TOPOS. The relations of the structures based on the 0@4@22 core are explored as a result of migration of atoms between different shells of the nanoclusters. It is shown that the 0@4@22 nanoclusters frequently occur as building units of intermetallics of different composition and structure type. Regularities in chemical composition of 702 γ-brass-type nano- clusters were found within both the nanoclusters approach (multishell structure) and the nested-polyhedra model. A database containing all topological types of γ-brass nanoclusters is created with which one can search for the corresponding atomic configuration in any intermetallics. 1. INTRODUCTION in quite different compounds, even belonging to different struc- fi ture types. In this work, we consider applications of this approach In the crystal chemistry of intermetallics, the classi cation in γ terms of atomic coordination polyhedra is traditionally used. -

Icosahedral Constructions
BRIDGES Mathematical Connections in Art, Music, and Science Icosahedral Constructions George W. Hart Dept. Computer Science Hofstra University Hempstead, NY. 11549 [email protected]· Abstract A mathematical concept has inspired me to create a series of sculptures. While the media, surface forms, and general impact of these constructions may vary considerably, there is an ancient underlying structure common to the series. The mathematical basis behind these sculptures is the chiral icosahedral symmetry group. This underlying form binds these pieces in a way that may be obvious to a mathematician accustomed to the study of patterns, yet invisible to a casual observer. For centuries, geometry has been considered fundamental to an educated mind and has been both tool and inspiration to many artists, yet it has lost this status in our current culture. One purpose of my artwork is to show that geometry still has a power and a relevance. I hope to prod the viewer into seeing the type of deeper connection which is the subject of this series of sculptures. In addition, there is a natural aesthetic which many artists have found in polyhedral symmetry. Icosahedral Symmetry The ancient Greeks who wrote ofthe five Platonic solids certainly appreciated the geometric beauty which they embody. When any of us now turns a dodecahedron in our hand we see the same quintessential form which inspired Pythagoras and many 'Others through the ages. Leonardo DaVinci's drawings of the icosahedron and the dodecahedron, published in 1509, are shown as Fig 1. Although the dodecahedron may appear superficially very different from the icosahedron, there is a level of analysis at which they are identical. -
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination Marjorie Senechal Editor Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination with George Fleck and Stan Sherer 123 Editor Marjorie Senechal Department of Mathematics and Statistics Smith College Northampton, MA, USA ISBN 978-0-387-92713-8 ISBN 978-0-387-92714-5 (eBook) DOI 10.1007/978-0-387-92714-5 Springer New York Heidelberg Dordrecht London Library of Congress Control Number: 2013932331 Mathematics Subject Classification: 51-01, 51-02, 51A25, 51M20, 00A06, 00A69, 01-01 © Marjorie Senechal 2013 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publishers location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. -

Grade 7: Content and Reporting Targets
Grade 7: Content and Reporting Targets Across the strands and the terms Problem Solving, Communication, Technology, and Reasoning – expectations to be applied to any/all content clusters. Term 1 – Content Targets Term 2 – Content Targets Term 3 – Content Targets Number Sense and Numeration* Number Sense and Numeration* Number Sense and Numeration* • exponents • adding and subtracting fractions • integers • multiples and factors Measurement • order of operations • square roots • problem solving with irregular 2-D Measurement* Measurement* shapes • investigating trapezoids • parallelograms and triangles • problem solving with 3-D figures • application of measurement tools (taught • rectangular prisms Geometry and Spatial Sense* and used as contexts for assessment tasks giving assessment data in other strands) Geometry and Spatial Sense • congruency • building and sketching 3-D models (to Patterning and Algebra Geometry and Spatial Sense* support Measurement in this term. Save • solving equations by inspection and • analysis of tiling and transformational any assessment data until Term 2 when systematic trial (introduction - report in geometry summative assessment tasks are all Categories in Term 3) Patterning and Algebra* combined with Measurement) Data Management and Probability* • apply Patterning and Algebra in Number Patterning and Algebra* • importance of data management skills Sense and Numeration, and Measurement • describing patterns • stem-and-leaf plots and frequency tables (report on solving equations in all • spreadsheet vs. -

Islamic Tilings and Polyhedra Teachers Booklet
���������������������� �������������������������������������� ������������������������������� ��������������� ���������������������������������������������������������� ���������������������������������������������� ���������������������������� Form, Shape and Space: An Exhibition of Tilings and Polyhedra Contents 1. Introduction to the Exhibition 2 2. Islamic ArtArt 8 2.1 Geometry in Islamic art 10 2.2 Symbolism in Islamic art 11 3. The Alhambra Palace 12 4. The Platonic Solids 13 5. Activities 18 5.1 Making shapes: Equilateral triangles, hexagons and six-pointed stars 18 using a compass and ruler 5.2 Making shapes: Squares, octagons, crosses and eight-pointed stars using 19 a compass and ruler 5.3 Making shapes: Paper-folding polygons 20 5.4 Making patterns: Islamic tiling patterns using folded paper shapes 22 5.5 Making polyhedra: Patterned Platonic polyhedra using pull-up nets 31 5.6 Making polyhedra: Make your own Patterned Pull-up nets 42 1 1. Introduction to the Exhibition Symmetry is a simple concept that has tremendous meaning. It is possibly the most signifi cant and elegant connection that transcends the boundaries between art, science and mathematics. Symmetry surrounds us, both in the natural world and in the world conceived by humans. Patterns and proportional relationships create a visual language expressing order and generating appealing, fascinating compositions. In the natural world symmetrical patterns can be found on every conceivable scale. Microscopic organisms, viruses and crystal structures, all exhibit the mathematical regularities of symmetry. One of the most practical applications of symmetry, drawing on concepts originating in the study of molecular crystal structures, is in the analysis and construction of regularly repeating patterns and tilings. Following certain geometrical rules, a wealth of patterns can be created, using the economical power of symmetry. -

Mathematical Science Communication a Study and a Case Study
Mathematical Science Communication a Study and a Case Study beim Fachbereich Mathematik und Informatik der Freien Universit¨atBerlin eingereichte Dissertation zur Erlangung des Grades einer Doktorin der Naturwissenschaften (Dr. rer. nat.) vorgelegt von Diplom Mathematikerin (Dipl.-Math.) Anna Maria Hartkopf Berlin 2020 Anna Maria Hartkopf: Mathematical Science Communication Day of the thesis defense: September 23, 2020 Supervisor: Prof. G¨unter Ziegler Referees: Prof. G¨unter Ziegler Prof. Hans Peter Peters For my grandparents: Anni (née. Lankes) and Fritz Hartkopf, and Maria Schreiber (née. Bolten) Acknowledgements My biggest thanks go to my supervisor G¨unter M. Ziegler. He gave me the perfect combination of freedom to explore and support to realize my ideas. Hans Peter Peters patiently answered all my questions about the science of science communication. Thank you both very much. Many thanks are also owed to the Berlin Mathematical School and their mentoring program that led me to Heike Siebert, who supported my academic development in significant ways. I am grateful to the Collaborative Research Centre Discretization in Geometry and Dynamics which funded my position and the realization of the project. I would also like to thank my colleagues at AG Diskrete Geometry at Freie Universit¨atBerlin for their support. Pavle Blagojevi´cwas always a source of encouragement. Jean-Philippe Labb´e taught me coding in SAGE and to always look on the bright side. Moritz Firsching provided the code for the Koebe-Andreev-Thurston realization of the polyhedra. Elke Pose helped organize my funding and encouraged me in situations of doubt. Hannah Sch¨aferSj¨oberg, Sophia Elia and I shared an actual office and a virtual one during the pandemic. -

Flat Maps That Improve on the Winkel Tripel J
Flat Maps that improve on the Winkel Tripel J. Richard Gott III1, David M. Goldberg2, and Robert J. Vanderbei3 1. Department of Astrophysical Sciences, Princeton University, Princeton, NJ, USA 2. Department of Physics, Drexel University, Philadelphia, PA, USA 3. Department of Operations Research, Princeton University, Princeton, NJ, USA ABSTRACT Goldberg & Gott (2008) developed six error measures to rate flat map projections on their verisimilitude to the sphere: Isotropy, Area, Flexion, Skewness, Distances, and Boundary Cuts. The first two depend on the metric of the projection, the next two on its first derivatives. By these criteria, the Winkel Tripel (used by National Geographic for world maps) was the best scoring of all the known projections with a sum of squares of the six errors of 4.563, normalized relative to the Equirectangular in each error term. We present here a useful Gott-Wagner variant with a slightly better error score of only 4.497. We also present a radically new class of flat double-sided maps (like phonograph records) which have correct topology and vastly improved error scores: 0.881 for the azimuthal equidistant version. We believe it is the most accurate flat map of Earth yet. We also show maps of other solar system objects and sky maps. Introduction In terms of shape and area distortions, the Winkel-Tripel projection is hard to beat. Goldberg & Gott (2008) introduced a metric for comparing the fidelity of whole world map projections: Isotropy, Area, Flexion (the apparent bending of great circle routes on the map), Skewness (lopsidedness), Distances, and Boundary Cuts. By evaluating the fidelity metric for a wide range of popular (and occasionally obscure) map projections, it was found that the Winkel Tripel scored best among known map projections for whole planet maps. -

And 3-Regular Carbon Network of Genus 26
Journal of Mathematical Chemistry (© 2006) DOI: 10.1007/s10910-006-9137-2 The undecakisicosahedral group and a 3-regular carbon network of genus 26 Erwin Lijnen∗ and Arnout Ceulemans Departement Chemie, K.U.Leuven, Celestijnenlaan 200F, B-3001 Leuven, Belgium Email: [email protected] Patrick W. Fowler Department of Chemistry, University of Sheffield, S3 7HF,UK Michel Deza Laboratoire de Geom´ etrie´ Applique,´ LIGA-EuJC, Ecole´ Normale Superieure,´ 45 Rue d’Ulm, F-75230 Paris Cedex 05, France Received 7 April 2006; revised 9 May 2006 Three projective special linear groups PSL(2,p), those with p = 5, 7 and 11, can be seen as p-multiples of tetrahedral, octahedral and icosahedral rotational point groups, respectively. The first two have already found applications in carbon chemistry and physics, as PSL(2,5) ≡ I is the rotation group of the fullerene C60 and dodecahedrane C20H20, and PSL(2,7) is the rotation group of the 56-vertex all-heptagon Klein map, an idealisation of the hypothetical genus-3 “plumber’s nightmare” allotrope of carbon. Here, we present an analysis of PSL(2,11) as the rotation group of a 220-vertex, all 11- gon, 3-regular map, which provides the basis for a more exotic hypothetical sp2 frame- work of genus 26. The group structure and character table of PSL(2,11) are developed in chemical notation and a three dimensional (3D) geometrical realisation of the 220- vertex map is derived in terms of a punctured polyhedron model where each of 12 pen- tagons of the truncated icosahedron is connected by a tunnel to an interior void and the 20 hexagons are connected tetrahedrally in sets of 4. -

Discovering the Polyhedra
DISCOVERING THE POLYHEDRA CARMEN TRULLS MEDINA IES FRANCESC FERRER I GUÀRDIA Generació Plurilingüe (GEP) Year 2 2018-2019 Els materials creats en el marc de la formació del programa GEP pertanyen a l’autor/a amb una llicència creative commons CC BY-NC-SA: Reconeixement - No Comercial - Compartir Igual Generació Plurilingüe (GEP) – 2018-2021 Title Discovering the polyhedra Authorship Carmen Trulls Medina School IES Francesc Ferrer I Guàrdia from Sant Joan Despí Students’ CEFR Level (A1, A2...) A2 Grade 2nd ESO Content area(s) Mathematics, Geometry Number of sessions 6 + 1 (4, 6 or 9) Teacher(s) involved Carmen Trulls Medina Key words Polyhedron, edges, vertices, sides, platonic solids, area, volume Adapted from CLIL-SI 2015. More information at: http://grupsderecerca.uab.cat/clilsi/ Generació Plurilingüe (GEP) – 2018-2021 1. MY PROJECT Introduction: Geometry is a very important field within mathematics. The process of understanding the space and the relationship among segments, lines, faces, polyhedra or three-D shapes sometimes becomes a hard issue. In this PBL project I try to facilitate this process through experiencing the construction of models, the viewing of slides and You-Tube videos, the reading of texts, and other activities that have been prepared. All this framework of activities has been woven with the language. The production (writing and speaking) and understanding (reading and listening) of language is facilitated through scaffolding (vocabulary, lists, games, ICT activities, language structures). I hope that you enjoy the process of learning! Driving question: How are the polyhedra that you can discover in your High School? Final product: 1. Polyhedron models of the discoveries.