Flat Maps That Improve on the Winkel Tripel J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Classification of Polyhedral Shapes from Individual Anisotropically
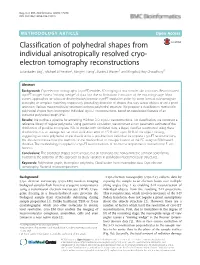
Bag et al. BMC Bioinformatics (2016) 17:234 DOI 10.1186/s12859-016-1107-5 METHODOLOGY ARTICLE Open Access Classification of polyhedral shapes from individual anisotropically resolved cryo- electron tomography reconstructions Sukantadev Bag1, Michael B Prentice2, Mingzhi Liang3, Martin J Warren3 and Kingshuk Roy Choudhury4* Abstract Background: Cryo-electron tomography (cryo-ET) enables 3D imaging of macromolecular structures. Reconstructed cryo-ET images have a “missing wedge” of data loss due to limitations in rotation of the mounting stage. Most current approaches for structure determination improve cryo-ET resolution either by some form of sub-tomogram averaging or template matching, respectively precluding detection of shapes that vary across objects or are a priori unknown. Various macromolecular structures possess polyhedral structure. We propose a classification method for polyhedral shapes from incomplete individual cryo-ET reconstructions, based on topological features of an extracted polyhedral graph (PG). Results: We outline a pipeline for extracting PG from 3-D cryo-ET reconstructions. For classification, we construct a reference library of regular polyhedra. Using geometric simulation, we construct a non-parametric estimate of the distribution of possible incomplete PGs. In studies with simulated data, a Bayes classifier constructed using these distributions has an average test set misclassification error of < 5 % with upto 30 % of the object missing, suggesting accurate polyhedral shape classification is possible from individual incomplete cryo-ET reconstructions. We also demonstrate how the method can be made robust to mis-specification of the PG using an SVM based classifier. The methodology is applied to cryo-ET reconstructions of 30 micro-compartments isolated from E. -

Portraying Earth
A map says to you, 'Read me carefully, follow me closely, doubt me not.' It says, 'I am the Earth in the palm of your hand. Without me, you are alone and lost.’ Beryl Markham (West With the Night, 1946 ) • Map Projections • Families of Projections • Computer Cartography Students often have trouble with geographic names and terms. If you need/want to know how to pronounce something, try this link. Audio Pronunciation Guide The site doesn’t list everything but it does have the words with which you’re most likely to have trouble. • Methods for representing part of the surface of the earth on a flat surface • Systematic representations of all or part of the three-dimensional Earth’s surface in a two- dimensional model • Transform spherical surfaces into flat maps. • Affect how maps are used. The problem: Imagine a large transparent globe with drawings. You carefully cover the globe with a sheet of paper. You turn on a light bulb at the center of the globe and trace all of the things drawn on the globe onto the paper. You carefully remove the paper and flatten it on the table. How likely is it that the flattened image will be an exact copy of the globe? The different map projections are the different methods geographers have used attempting to transform an image of the spherical surface of the Earth into flat maps with as little distortion as possible. No matter which map projection method you use, it is impossible to show the curved earth on a flat surface without some distortion. -

Choosing the Best Atlas for Your Classroom William Slattery, Editor
Choosing the Best Atlas for Your Classroom William Slattery, Editor (Last updated August 14, 2008) As editor of Social Studies School Service's Geography Catalog, I frequently receive plaintive phone calls from teachers and department heads who are about to spend their hard-won money on an atlas (or on dozens or even hundreds of atlases), and they need more information than the one-paragraph descriptions our print catalogs give them. Often they ask which atlas is "best," but the real question that needs to be asked is "Which atlas is best for my particular needs?" Some important questions to consider here: Who is going to use the atlas? What will they use it for? What features are most important to you? How much do you plan to spend? For instance, if you will use the atlas for intensive work on understanding latitude and longitude, you might require an atlas that uses no other location system that might distract students or be used as a crutch. On the other hand, you may prefer an atlas that includes not only latitude and longitude but also alphanumeric grids, because then one system can serve as the answer key to the other. This article provides a series of descriptions that permit point-by-point comparisons between atlases. It discusses what types of maps are included, how color is used, how much detail is shown, and how up-to-date the atlases are. Note that, throughout these descriptions, the term "sub-national political units" refers to political entities one level below the national government (such as states, departments, provinces, and republics in a federation). -
Maps and Cartography: Map Projections a Tutorial Created by the GIS Research & Map Collection
Maps and Cartography: Map Projections A Tutorial Created by the GIS Research & Map Collection Ball State University Libraries A destination for research, learning, and friends What is a map projection? Map makers attempt to transfer the earth—a round, spherical globe—to flat paper. Map projections are the different techniques used by cartographers for presenting a round globe on a flat surface. Angles, areas, directions, shapes, and distances can become distorted when transformed from a curved surface to a plane. Different projections have been designed where the distortion in one property is minimized, while other properties become more distorted. So map projections are chosen based on the purposes of the map. Keywords •azimuthal: projections with the property that all directions (azimuths) from a central point are accurate •conformal: projections where angles and small areas’ shapes are preserved accurately •equal area: projections where area is accurate •equidistant: projections where distance from a standard point or line is preserved; true to scale in all directions •oblique: slanting, not perpendicular or straight •rhumb lines: lines shown on a map as crossing all meridians at the same angle; paths of constant bearing •tangent: touching at a single point in relation to a curve or surface •transverse: at right angles to the earth’s axis Models of Map Projections There are two models for creating different map projections: projections by presentation of a metric property and projections created from different surfaces. • Projections by presentation of a metric property would include equidistant, conformal, gnomonic, equal area, and compromise projections. These projections account for area, shape, direction, bearing, distance, and scale. -

Cylindrical Projections 27
MAP PROJECTION PROPERTIES: CONSIDERATIONS FOR SMALL-SCALE GIS APPLICATIONS by Eric M. Delmelle A project submitted to the Faculty of the Graduate School of State University of New York at Buffalo in partial fulfillments of the requirements for the degree of Master of Arts Geographical Information Systems and Computer Cartography Department of Geography May 2001 Master Advisory Committee: David M. Mark Douglas M. Flewelling Abstract Since Ptolemeus established that the Earth was round, the number of map projections has increased considerably. Cartographers have at present an impressive number of projections, but often lack a suitable classification and selection scheme for them, which significantly slows down the mapping process. Although a projection portrays a part of the Earth on a flat surface, projections generate distortion from the original shape. On world maps, continental areas may severely be distorted, increasingly away from the center of the projection. Over the years, map projections have been devised to preserve selected geometric properties (e.g. conformality, equivalence, and equidistance) and special properties (e.g. shape of the parallels and meridians, the representation of the Pole as a line or a point and the ratio of the axes). Unfortunately, Tissot proved that the perfect projection does not exist since it is not possible to combine all geometric properties together in a single projection. In the twentieth century however, cartographers have not given up their creativity, which has resulted in the appearance of new projections better matching specific needs. This paper will review how some of the most popular world projections may be suited for particular purposes and not for others, in order to enhance the message the map aims to communicate. -

Γ‑Brass Polyhedral Core in Intermetallics: the Nanocluster Model † † ‡ § † ⊥ Arina A
Article pubs.acs.org/IC Terms of Use γ‑Brass Polyhedral Core in Intermetallics: The Nanocluster Model † † ‡ § † ⊥ Arina A. Pankova, Vladislav A. Blatov, , ,* Gregory D. Ilyushin, and Davide M. Proserpio*, , † Samara Center for Theoretical Materials Science (SCTMS), Samara State University, Ac. Pavlov Street 1, Samara 443011, Russia ‡ Chemistry Department, Faculty of Science, King Abdulaziz University, Jeddah 21589, Saudi Arabia § Institute of Crystallography, Russian Academy of Science, Leninsky Prospekt 59, Moscow 117333, Russia ⊥ Dipartimento di Chimica, Universitàdegli Studi di Milano, Via Golgi 19, 20133 Milano, Italy *S Supporting Information ABSTRACT: Using the TOPOS program package, 26-atom γ nanoclusters of the -brass (Cu5Zn8) type (0@4@22 or 0@ 8@18) were found in 5918 crystal structures of cubic inter- metallics. The nanocluster models were built for all the inter- metallics using a recently developed algorithm implemented into TOPOS. The relations of the structures based on the 0@4@22 core are explored as a result of migration of atoms between different shells of the nanoclusters. It is shown that the 0@4@22 nanoclusters frequently occur as building units of intermetallics of different composition and structure type. Regularities in chemical composition of 702 γ-brass-type nano- clusters were found within both the nanoclusters approach (multishell structure) and the nested-polyhedra model. A database containing all topological types of γ-brass nanoclusters is created with which one can search for the corresponding atomic configuration in any intermetallics. 1. INTRODUCTION in quite different compounds, even belonging to different struc- fi ture types. In this work, we consider applications of this approach In the crystal chemistry of intermetallics, the classi cation in γ terms of atomic coordination polyhedra is traditionally used. -

Assignment #3 Map Projection
Assignment #3 Map Projection 1.) Mapping the world For assignment 3, I have used World Winkel Tripel Projection system to project map of the world. This projection is used for world maps to minimize shape and area distortion. It has been used by the National Geographic Society since 1998 for general and thematic world maps. It is a compromise projection used for world maps that averages the coordinates from the equirectangular (equidistant cylindrical) and Aitoff projections. This was developed by Oswald Winkel in 1921. Modified azimuthal—coordinates are the average of the Aitoff and equirectangular projections. Meridians are equally spaced and concave toward the central meridian. The central meridian is a straight line. Parallels are equally spaced curves, concave toward the poles. The poles are approximately 0.4 times the length of the equator. The length of the poles depends on the standard parallel chosen. Figure 1: Mapping world map using World Winkel Tripel NGS Projection 2.) Mapping the United States In this exercise, map of the United States showing states was selected. The properties of U.S cities was modified using “Query Builder” such that the capital cities of each state is considered with population greater than 10000. Symbology was edited and each capital cities were labeled. After that, the distance between two cities was measured using “Measure” tool in toolbar and “Magnifier” option in windows tool in toolbar. Later, for the same map projection was introduced. The map was projected using USA Albert Equal Area projection. After the projection was completed, the distance between same two cities was measured. -
Types of Projections
Types of Projections Conic Cylindrical Planar Pseudocylindrical Conic Projection In flattened form a conic projection produces a roughly semicircular map with the area below the apex of the cone at its center. When the central point is either of Earth's poles, parallels appear as concentric arcs and meridians as straight lines radiating from the center. Usually used for maps of countries or continents in the middle latitudes (30-60 degrees) Cylindrical Projection A cylindrical projection is a type of map in which a cylinder is wrapped around a sphere (the globe), and the details of the globe are projected onto the cylindrical surface. Then, the cylinder is unwrapped into a flat surface, yielding a rectangular-shaped map. Generally used for navigation, but this map is very distorted at the poles. Very Northern Hemisphere oriented. Planar (Azimuthal) Projection Planar projections are the subset of 3D graphical projections constructed by linearly mapping points in three-dimensional space to points on a two-dimensional projection plane. Generally used for polar maps. Focused on a central point. Outside edge is distorted Oval / Pseudo-cylindrical Projection Pseudo-cylindrical maps combine many cylindrical maps together. This reduces distortion. Each cylinder is focused on a particular latitude line. Generally used to show world phenomenon or movement – quite accurate because it is computer generated. Famous Map Projections Mercator Winkel-Tripel Sinusoidal Goode’s Interrupted Homolosine Robinson Mollweide Mercator The Mercator projection is a cylindrical map projection presented by the Flemish geographer and cartographer Gerardus Mercator in 1569. this map accurately shows the true distance and the shapes of landmasses, but as you move away from the equator the size and distance is distorted. -

1. Introduction
Chapter-Introduction GIS 1. INTRODUCTION. Geography is the study of Earth’s features and patterns of their variations in spatial location and time. Many questions of agricultural production are geographic in nature as the production depends on the environment and prevailing socio economic conditions, both of which vary spatially and in time. Examples are questions related to natural resources management, precision agriculture, agro- ecological classification for land use planning, regional trends and patterns in technology adaptation, agricultural productivity and income, non-Pont source pollution from agricultural lands, etc. Answering these questions requires access to large volumes of multidimensional geographical (spatial) information of weather, soils, topography, water resources, socio economic status, etc. Further, answers to even apparently simple questions require that the data from several sources be integrated in a consistent form. Geographical Information Systems or GIS enable representation and integration of such spatial information. Geographic information systems (GIS) (also known as Geospatial information systems) are Computer Software and hardware systems that enable users to capture, store, analyze and manage spatially referenced data. GISs have transformed the way spatial (geographic) data, relationships and patterns in the world are able to be interactively queried, processed, analyzed, mapped, modelled, visualized, and displayed for an increasingly large range of users, for a multitude of purposes. In a general sense, the term describes any information system that integrates, stores, edits, analyzes, shares, and displays geographic information. GIS applications are tools that allow users to create interactive queries (user-created searches), analyze spatial information, edit data in maps, and present the results of all these operations. -

Icosahedral Constructions
BRIDGES Mathematical Connections in Art, Music, and Science Icosahedral Constructions George W. Hart Dept. Computer Science Hofstra University Hempstead, NY. 11549 [email protected]· Abstract A mathematical concept has inspired me to create a series of sculptures. While the media, surface forms, and general impact of these constructions may vary considerably, there is an ancient underlying structure common to the series. The mathematical basis behind these sculptures is the chiral icosahedral symmetry group. This underlying form binds these pieces in a way that may be obvious to a mathematician accustomed to the study of patterns, yet invisible to a casual observer. For centuries, geometry has been considered fundamental to an educated mind and has been both tool and inspiration to many artists, yet it has lost this status in our current culture. One purpose of my artwork is to show that geometry still has a power and a relevance. I hope to prod the viewer into seeing the type of deeper connection which is the subject of this series of sculptures. In addition, there is a natural aesthetic which many artists have found in polyhedral symmetry. Icosahedral Symmetry The ancient Greeks who wrote ofthe five Platonic solids certainly appreciated the geometric beauty which they embody. When any of us now turns a dodecahedron in our hand we see the same quintessential form which inspired Pythagoras and many 'Others through the ages. Leonardo DaVinci's drawings of the icosahedron and the dodecahedron, published in 1509, are shown as Fig 1. Although the dodecahedron may appear superficially very different from the icosahedron, there is a level of analysis at which they are identical. -
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination
Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination Marjorie Senechal Editor Shaping Space Exploring Polyhedra in Nature, Art, and the Geometrical Imagination with George Fleck and Stan Sherer 123 Editor Marjorie Senechal Department of Mathematics and Statistics Smith College Northampton, MA, USA ISBN 978-0-387-92713-8 ISBN 978-0-387-92714-5 (eBook) DOI 10.1007/978-0-387-92714-5 Springer New York Heidelberg Dordrecht London Library of Congress Control Number: 2013932331 Mathematics Subject Classification: 51-01, 51-02, 51A25, 51M20, 00A06, 00A69, 01-01 © Marjorie Senechal 2013 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publishers location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. -
Introduction to Map Projections
Introduction to Cartographical Map Projections Education Abroad Asia eduabroadasia.com 808-135 THAI GEOGRAPHY Steven Andrew Martin, PhD Faculty of International Studies Prince of Songkla University https://www.facebook.com/EducationAbroadAsia What is a Map Projection? 2-Dimensional Representation of a 3-Dimensional World --- Flattening the Earth --- Because the Earth is spherical in shape, its surface cannot be shown precisely on a flat surface... Only a globe can accurately represent shapes, areas, sizes, and directions on the Earth's surface χάρτης Cartography γράφειν From Greek Khartēs, = Map Graphein = Write . Measuring Earth’s shape and features . Collecting and storing information about terrain, places, people, etc. Representing the three-dimensional planet . Designing conventions for graphical representation of data . Printing and publishing information Early Tools of Cartography NEW SCHOOL MAPPING REMOTE SENSING AND GIS Phanom Kulen, Cambodia Laem Pakarang, Thailand The Cartographic Challenge A wide variety of map “projections” are used by cartographers and map makers... “Projections” involve compromises in which some curved aspects are distorted while others are shown accurately Projection Concepts Cylindrical Types of Projections Properties Regularly-spaced meridians to equally spaced vertical lines, and parallels to horizontal lines. Conformal Pseudo-cylindrical Preserves angles locally, Central meridian and parallels as straight lines. Other meridians are curves (or possibly straight from implying that locally pole to equator), regularly spaced along parallels. shapes are not distorted. Conic Equal Area Maps meridians as straight lines, and parallels as arcs of circles. Areas are conserved. Pseudo-conical Represents the central meridian as a straight line, other meridians as complex curves, and parallels as Compromise circular arcs.