Representations of the Infinite Symmetric Group
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On Some Generation Methods of Finite Simple Groups
Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography On Some Generation Methods of Finite Simple Groups Ayoub B. M. Basheer Department of Mathematical Sciences, North-West University (Mafikeng), P Bag X2046, Mmabatho 2735, South Africa Groups St Andrews 2017 in Birmingham, School of Mathematics, University of Birmingham, United Kingdom 11th of August 2017 Ayoub Basheer, North-West University, South Africa Groups St Andrews 2017 Talk in Birmingham Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography Abstract In this talk we consider some methods of generating finite simple groups with the focus on ranks of classes, (p; q; r)-generation and spread (exact) of finite simple groups. We show some examples of results that were established by the author and his supervisor, Professor J. Moori on generations of some finite simple groups. Ayoub Basheer, North-West University, South Africa Groups St Andrews 2017 Talk in Birmingham Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography Introduction Generation of finite groups by suitable subsets is of great interest and has many applications to groups and their representations. For example, Di Martino and et al. [39] established a useful connection between generation of groups by conjugate elements and the existence of elements representable by almost cyclic matrices. Their motivation was to study irreducible projective representations of the sporadic simple groups. In view of applications, it is often important to exhibit generating pairs of some special kind, such as generators carrying a geometric meaning, generators of some prescribed order, generators that offer an economical presentation of the group. -

14.2 Covers of Symmetric and Alternating Groups
Remark 206 In terms of Galois cohomology, there an exact sequence of alge- braic groups (over an algebrically closed field) 1 → GL1 → ΓV → OV → 1 We do not necessarily get an exact sequence when taking values in some subfield. If 1 → A → B → C → 1 is exact, 1 → A(K) → B(K) → C(K) is exact, but the map on the right need not be surjective. Instead what we get is 1 → H0(Gal(K¯ /K), A) → H0(Gal(K¯ /K), B) → H0(Gal(K¯ /K), C) → → H1(Gal(K¯ /K), A) → ··· 1 1 It turns out that H (Gal(K¯ /K), GL1) = 1. However, H (Gal(K¯ /K), ±1) = K×/(K×)2. So from 1 → GL1 → ΓV → OV → 1 we get × 1 1 → K → ΓV (K) → OV (K) → 1 = H (Gal(K¯ /K), GL1) However, taking 1 → µ2 → SpinV → SOV → 1 we get N × × 2 1 ¯ 1 → ±1 → SpinV (K) → SOV (K) −→ K /(K ) = H (K/K, µ2) so the non-surjectivity of N is some kind of higher Galois cohomology. Warning 207 SpinV → SOV is onto as a map of ALGEBRAIC GROUPS, but SpinV (K) → SOV (K) need NOT be onto. Example 208 Take O3(R) =∼ SO3(R)×{±1} as 3 is odd (in general O2n+1(R) =∼ SO2n+1(R) × {±1}). So we have a sequence 1 → ±1 → Spin3(R) → SO3(R) → 1. 0 × Notice that Spin3(R) ⊆ C3 (R) =∼ H, so Spin3(R) ⊆ H , and in fact we saw that it is S3. 14.2 Covers of symmetric and alternating groups The symmetric group on n letter can be embedded in the obvious way in On(R) as permutations of coordinates. -

6 Permutation Groups
Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan 6 Permutation Groups Let S be a nonempty set and M(S) be the collection of all mappings from S into S. In this section, we will emphasize on the collection of all invertible mappings from S into S. The elements of this set will be called permutations because of Theorem 2.4 and the next definition. Definition 6.1 Let S be a nonempty set. A one-to-one mapping from S onto S is called a permutation. Consider the collection of all permutations on S. Then this set is a group with respect to composition. Theorem 6.1 The set of all permutations of a nonempty set S is a group with respect to composition. This group is called the symmetric group on S and will be denoted by Sym(S). Proof. By Theorem 2.4, the set of all permutations on S is just the set I(S) of all invertible mappings from S to S. According to Theorem 4.3, this set is a group with respect to composition. Definition 6.2 A group of permutations , with composition as the operation, is called a permutation group on S. Example 6.1 1. Sym(S) is a permutation group. 2. The collection L of all invertible linear functions from R to R is a permu- tation group with respect to composition.(See Example 4.4.) Note that L is 1 a proper subset of Sym(R) since we can find a function in Sym(R) which is not in L, namely, the function f(x) = x3. -

Quasi P Or Not Quasi P? That Is the Question
Rose-Hulman Undergraduate Mathematics Journal Volume 3 Issue 2 Article 2 Quasi p or not Quasi p? That is the Question Ben Harwood Northern Kentucky University, [email protected] Follow this and additional works at: https://scholar.rose-hulman.edu/rhumj Recommended Citation Harwood, Ben (2002) "Quasi p or not Quasi p? That is the Question," Rose-Hulman Undergraduate Mathematics Journal: Vol. 3 : Iss. 2 , Article 2. Available at: https://scholar.rose-hulman.edu/rhumj/vol3/iss2/2 Quasi p- or not quasi p-? That is the Question.* By Ben Harwood Department of Mathematics and Computer Science Northern Kentucky University Highland Heights, KY 41099 e-mail: [email protected] Section Zero: Introduction The question might not be as profound as Shakespeare’s, but nevertheless, it is interesting. Because few people seem to be aware of quasi p-groups, we will begin with a bit of history and a definition; and then we will determine for each group of order less than 24 (and a few others) whether the group is a quasi p-group for some prime p or not. This paper is a prequel to [Hwd]. In [Hwd] we prove that (Z3 £Z3)oZ2 and Z5 o Z4 are quasi 2-groups. Those proofs now form a portion of Proposition (12.1) It should also be noted that [Hwd] may also be found in this journal. Section One: Why should we be interested in quasi p-groups? In a 1957 paper titled Coverings of algebraic curves [Abh2], Abhyankar conjectured that the algebraic fundamental group of the affine line over an algebraically closed field k of prime characteristic p is the set of quasi p-groups, where by the algebraic fundamental group of the affine line he meant the family of all Galois groups Gal(L=k(X)) as L varies over all finite normal extensions of k(X) the function field of the affine line such that no point of the line is ramified in L, and where by a quasi p-group he meant a finite group that is generated by all of its p-Sylow subgroups. -
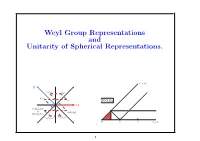
Weyl Group Representations and Unitarity of Spherical Representations
Weyl Group Representations and Unitarity of Spherical Representations. Alessandra Pantano, University of California, Irvine Windsor, October 23, 2008 ν1 = ν2 β S S ν α β Sβν Sαν ν SO(3,2) 0 α SαSβSαSβν = SβSαSβν SβSαSβSαν S S SαSβSαν β αν 0 1 2 ν = 0 [type B2] 2 1 0: Introduction Spherical unitary dual of real split semisimple Lie groups spherical equivalence classes of unitary-dual = irreducible unitary = ? of G spherical repr.s of G aim of the talk Show how to compute this set using the Weyl group 2 0: Introduction Plan of the talk ² Preliminary notions: root system of a split real Lie group ² De¯ne the unitary dual ² Examples (¯nite and compact groups) ² Spherical unitary dual of non-compact groups ² Petite K-types ² Real and p-adic groups: a comparison of unitary duals ² The example of Sp(4) ² Conclusions 3 1: Preliminary Notions Lie groups Lie Groups A Lie group G is a group with a smooth manifold structure, such that the product and the inversion are smooth maps Examples: ² the symmetryc group Sn=fbijections on f1; 2; : : : ; ngg à finite ² the unit circle S1 = fz 2 C: kzk = 1g à compact ² SL(2; R)=fA 2 M(2; R): det A = 1g à non-compact 4 1: Preliminary Notions Root systems Root Systems Let V ' Rn and let h; i be an inner product on V . If v 2 V -f0g, let hv;wi σv : w 7! w ¡ 2 hv;vi v be the reflection through the plane perpendicular to v. A root system for V is a ¯nite subset R of V such that ² R spans V , and 0 2= R ² if ® 2 R, then §® are the only multiples of ® in R h®;¯i ² if ®; ¯ 2 R, then 2 h®;®i 2 Z ² if ®; ¯ 2 R, then σ®(¯) 2 R A1xA1 A2 B2 C2 G2 5 1: Preliminary Notions Root systems Simple roots Let V be an n-dim.l vector space and let R be a root system for V . -

13. Symmetric Groups
13. Symmetric groups 13.1 Cycles, disjoint cycle decompositions 13.2 Adjacent transpositions 13.3 Worked examples 1. Cycles, disjoint cycle decompositions The symmetric group Sn is the group of bijections of f1; : : : ; ng to itself, also called permutations of n things. A standard notation for the permutation that sends i −! `i is 1 2 3 : : : n `1 `2 `3 : : : `n Under composition of mappings, the permutations of f1; : : : ; ng is a group. The fixed points of a permutation f are the elements i 2 f1; 2; : : : ; ng such that f(i) = i. A k-cycle is a permutation of the form f(`1) = `2 f(`2) = `3 : : : f(`k−1) = `k and f(`k) = `1 for distinct `1; : : : ; `k among f1; : : : ; ng, and f(i) = i for i not among the `j. There is standard notation for this cycle: (`1 `2 `3 : : : `k) Note that the same cycle can be written several ways, by cyclically permuting the `j: for example, it also can be written as (`2 `3 : : : `k `1) or (`3 `4 : : : `k `1 `2) Two cycles are disjoint when the respective sets of indices properly moved are disjoint. That is, cycles 0 0 0 0 0 0 0 (`1 `2 `3 : : : `k) and (`1 `2 `3 : : : `k0 ) are disjoint when the sets f`1; `2; : : : ; `kg and f`1; `2; : : : ; `k0 g are disjoint. [1.0.1] Theorem: Every permutation is uniquely expressible as a product of disjoint cycles. 191 192 Symmetric groups Proof: Given g 2 Sn, the cyclic subgroup hgi ⊂ Sn generated by g acts on the set X = f1; : : : ; ng and decomposes X into disjoint orbits i Ox = fg x : i 2 Zg for choices of orbit representatives x 2 X. -

Linear Algebraic Groups
Clay Mathematics Proceedings Volume 4, 2005 Linear Algebraic Groups Fiona Murnaghan Abstract. We give a summary, without proofs, of basic properties of linear algebraic groups, with particular emphasis on reductive algebraic groups. 1. Algebraic groups Let K be an algebraically closed field. An algebraic K-group G is an algebraic variety over K, and a group, such that the maps µ : G × G → G, µ(x, y) = xy, and ι : G → G, ι(x)= x−1, are morphisms of algebraic varieties. For convenience, in these notes, we will fix K and refer to an algebraic K-group as an algebraic group. If the variety G is affine, that is, G is an algebraic set (a Zariski-closed set) in Kn for some natural number n, we say that G is a linear algebraic group. If G and G′ are algebraic groups, a map ϕ : G → G′ is a homomorphism of algebraic groups if ϕ is a morphism of varieties and a group homomorphism. Similarly, ϕ is an isomorphism of algebraic groups if ϕ is an isomorphism of varieties and a group isomorphism. A closed subgroup of an algebraic group is an algebraic group. If H is a closed subgroup of a linear algebraic group G, then G/H can be made into a quasi- projective variety (a variety which is a locally closed subset of some projective space). If H is normal in G, then G/H (with the usual group structure) is a linear algebraic group. Let ϕ : G → G′ be a homomorphism of algebraic groups. Then the kernel of ϕ is a closed subgroup of G and the image of ϕ is a closed subgroup of G. -

On Some Designs and Codes from Primitive Representations of Some finite Simple Groups
On some designs and codes from primitive representations of some finite simple groups J. D. Key∗ Department of Mathematical Sciences Clemson University Clemson SC 29634 U.S.A. J. Moori† and B. G. Rodrigues‡ School of Mathematics, Statistics and Information Technology University of Natal-Pietermaritzburg Pietermaritzburg 3209 South Africa Abstract We examine a query posed as a conjecture by Key and Moori [11, Section 7] concerning the full automorphism groups of designs and codes arising from primitive permutation representations of finite simple groups, and based on results for the Janko groups J1 and J2 as studied in [11]. Here, following that same method of construc- tion, we show that counter-examples to the conjecture exist amongst some representations of some alternating groups, and that the simple symplectic groups in their natural representation provide an infinite class of counter-examples. 1 Introduction In examining the codes and designs arising from the primitive represen- tations of the first two Janko groups, Key and Moori [11] suggested in ∗Support of NSF grant #9730992 acknowledged. †Support of NRF and the University of Natal (URF) acknowledged. ‡Post-graduate scholarship of DAAD (Germany) and the Ministry of Petroleum (An- gola) acknowledged. 1 Section 7 of that paper that the computations made for these Janko groups could lead to the following conjecture: “any design D obtained from a primitive permutation representation of a simple group G will have the automorphism group Aut(G) as its full automorphism group, unless the design is isomorphic to another one constructed in the same way, in which case the automorphism group of the design will be a proper subgroup of Aut(G) containing G”. -

Stable Diffeomorphism Groups of 4-Manifolds Arxiv:2002.01737V1
Stable diffeomorphism groups of 4-manifolds Markus Szymik June 2008 A localisation of the category of n-manifolds is introduced by formally inverting the connected sum construction with a chosen n-manifold Y. On the level of automorphism groups, this leads to the stable diffeomorphism groups of n-manifolds. In dimensions 0 and 2, this is connected to the stable homotopy groups of spheres and the stable mapping class groups of Rie- mann surfaces. In dimension 4 there are many essentially different can- didates for the n-manifold Y to choose from. It is shown that the Bauer– 2 Furuta invariants provide invariants in the case Y = CP , which is related to the birational classification of complex surfaces. This will be the case for other Y only after localisation of the target category. In this context, it is shown that the K3-stable Bauer–Furuta invariants determine the S2×S2- stable invariants. arXiv:2002.01737v1 [math.GT] 5 Feb 2020 Introduction One of the main objects of geometric topology is to classify n-dimensional man- ifolds up to diffeomorphism – and their diffeomorphisms. However, the study of diffeomorphism groups has turned out to be difficult so far, and one is tempted to address simpler but related problems first. This has led, for example, to the introduction of the block diffeomorphism groups, which are relatively accessible via surgery theory, see [WW01] for a survey. In this work, the focus will be on a different way of simplifying things: localisation – in the sense of inverting opera- tions which need not be invertible originally. -

Quaternionic Root Systems and Subgroups of the $ Aut (F {4}) $
Quaternionic Root Systems and Subgroups of the Aut(F4) Mehmet Koca∗ and Muataz Al-Barwani† Department of Physics, College of Science, Sultan Qaboos University, PO Box 36, Al-Khod 123, Muscat, Sultanate of Oman Ramazan Ko¸c‡ Department of Physics, Faculty of Engineering University of Gaziantep, 27310 Gaziantep, Turkey (Dated: November 12, 2018) Cayley-Dickson doubling procedure is used to construct the root systems of some celebrated Lie algebras in terms of the integer elements of the division algebras of real numbers, complex numbers, quaternions and octonions. Starting with the roots and weights of SU(2) expressed as the real numbers one can construct the root systems of the Lie algebras of SO(4), SP (2) ≈ SO(5), SO(8), SO(9), F4 and E8 in terms of the discrete elements of the division algebras. The roots themselves display the group structures besides the octonionic roots of E8 which form a closed octonion algebra. The automorphism group Aut(F4) of the Dynkin diagram of F4 of order 2304, the largest crystallographic group in 4-dimensional Euclidean space, is realized as the direct product of two binary octahedral group of quaternions preserving the quaternionic root system of F4 .The Weyl groups of many Lie algebras, such as, G2, SO(7), SO(8), SO(9), SU(3)XSU(3) and SP (3) × SU(2) have been constructed as the subgroups of Aut(F4) .We have also classified the other non-parabolic subgroups of Aut(F4) which are not Weyl groups. Two subgroups of orders192 with different conju- gacy classes occur as maximal subgroups in the finite subgroups of the Lie group G2 of orders 12096 and 1344 and proves to be useful in their constructions. -

On My Schur-Weyl Duality Project Aba Mbirika Department of Mathematics University of Wisconsin–Eau Claire Eau Claire, WI 54701 Email: [email protected]
On my Schur-Weyl duality project Aba Mbirika Department of Mathematics University of Wisconsin{Eau Claire Eau Claire, WI 54701 email: [email protected] 1. Brief introduction to the project A focal point of classical representation theory is Schur-Weyl duality. Let V = Cn. Both ⊗k the general linear group GLn(C) and the symmetric group Sk act on V , the k-fold tensor product of V . In 1927, Schur found that these two groups are mutual centralizers of each other, thus relating their representations [4]. Subgroups of GLn and their centralizers have been extensively studied. We list a few with their corresponding centralizers below each one. GLn(C) ⊇ On(C) ⊇ Sn ⊇ An CSk ⊆ CBk(n) ⊆ CPk(n) ⊆ Unknown The centralizer of GLn can be viewed as the span of permutation diagrams. The centralizer of the orthogonal group On is the Brauer algebra CBk(n), spanned by the permutation diagrams plus some extra diagrams [1]. In 1993, the centralizer of the subgroup Sn of permutation matrices sitting inside GLn was presented as the partition algebra CPk(n), a span of partition diagrams [2]. The alternating group An is the determinant 1 permutation matrices. Its centralizer has yet to be formulated. It should be a super-algebra of this so-called partition algebra. I am attempting to describe this centralizer. 2. Background and motivation n Let V = C . The group GLn(C) acts naturally on V by left multiplication. Consider ⊗k ⊗k k-fold tensor copies of V , denoted as V . We may extend the action of GLn(C) on V by g · (v1 ⊗ v2 ⊗ · · · ⊗ vk) = (g · v1) ⊗ (g · v2) ⊗ · · · ⊗ (g · vk): ⊗k Also, the symmetric group Sk acts naturally on V by permuting the tensor places, that is, σ · (v1 ⊗ v2 ⊗ · · · ⊗ vk) = vσ(1) ⊗ vσ(2) ⊗ · · · ⊗ vσ(k). -
The Sylow Subgroups of the Symmetric Group*
THE SYLOWSUBGROUPS OF THE SYMMETRICGROUP* BY WILLIAM FINDLAY In the Sylow theorems f we learn that if the order of a group 2Í is divisible hj pa (p a prime integer) and not by jo*+1, then 31 contains one and only one set of conjugate subgroups of order pa, and any subgroup of 21 whose order is a power of p is a subgroup of some member of this set of conjugate subgroups of 2Í. These conjugate subgroups may be called the Sylow subgroups of 21. It will be our purpose to investigate the Sylow subgroups of the symmetric group of substitutions. By means of a preliminary lemma the discussion will be reduced to the case where the degree of the symmetric group is a power (pa) of the prime (p) under consideration. A set of generators of the group having been obtained, they are found to set forth, in the notation suggested by their origin, the complete imprimitivity of the group. The various groups of substitutions upon the systems of imprimi- tivity, induced by the substitutions of the original group, are seen to be them- selves Sylow subgroups of symmetric groups of degrees the various powers of p less than p". They are also the quotient groups under the initial group of an important series of invariant subgroups. In terms of the given notation convenient exhibitions are obtained of the commutator series of subgroups and also of all subgroups which may be consid- ered as the Sylow subgroups of symmetric groups of degree a power of p. Enumerations are made of the substitutions of periods p and p" and the con- jugacy relations of the latter set of substitutions are discussed.