THE DEVELOPMENT of GIPSICAM V3 a MOBILE MAPPING SYSTEM for RAPID ROAD ASSET DATA CAPTURE
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
New South Wales Class 1 Load Carrying Vehicle Operator’S Guide
New South Wales Class 1 Load Carrying Vehicle Operator’s Guide Important: This Operator’s Guide is for three Notices separated by Part A, Part B and Part C. Please read sections carefully as separate conditions may apply. For enquiries about roads and restrictions listed in this document please contact Transport for NSW Road Access unit: [email protected] 27 October 2020 New South Wales Class 1 Load Carrying Vehicle Operator’s Guide Contents Purpose ................................................................................................................................................................... 4 Definitions ............................................................................................................................................................... 4 NSW Travel Zones .................................................................................................................................................... 5 Part A – NSW Class 1 Load Carrying Vehicles Notice ................................................................................................ 9 About the Notice ..................................................................................................................................................... 9 1: Travel Conditions ................................................................................................................................................. 9 1.1 Pilot and Escort Requirements .......................................................................................................................... -

2013-2014 to 2015-2016 Ovens
Y RIV A E W RIN A H HIG H G WAY I H E M U H THOLOGOLONG - KURRAJONG TRK HAW KINS STR Y EET A W H F G L I A G H G E Y C M R E U E H K W A Y G A R A W C H R G E I E H K R E IV E M R U IN H A H IG MURR H AY VAL W LEY HI A GHWAY Y MA IN S TR EE K MURRAY RIVER Y E T A W E H R C IG N H E O THOLOGOLONG - BUNGIL REFERENCE AREA M T U S WISES CREEK - FLORA RESERVE H N H AY O W J MUR IGH RAY V A H K ALLEY RIN E HIGH IVE E WAY B R R ORE C LLA R P OAD Y ADM B AN D U RIVE R Y A D E W M E A W S IS N E C U N RE A U EK C N L Grevillia Track O Chiltern - Wallaces Gully C IN L Kurrajong Gap Wodonga Wodonga McFarlands Hill ! GRANYA - FIREBRACE LINK TRACK Chiltern Red Box Track Centre Tk GRANYA BRIDLE TK AN Z K AC E E PA R R C H A UON A HINDLETON - GRANYA GAP ROAD CREEK D G E N M A I T H T T A E B Chiltern Caledenia plots - All Nations road M I T T A GEORGES CREEK HILLAS TK R Chiltern Caledenia plots - All Nations road I V E Chiltern Skeleton Hill R Wodonga WRENS orchid block K E Baranduda Stringybark Block E R C Peechelba Frosts E HOUSE CREEK L D B ID Y M Boorhaman Native Grassland E C K Barambogie - Sandersons hill - grassland R EE E R C Barambogie - Sandersons hill - forest E G K N RI SP Brewers Road Baranduda Trig Point Track Cheesley Gate road HWAY HIG D LEY E VAL E RAY P K UR M C E Dry Forest Ck - Ref. -

NSW Trainlink Regional Train and Coach Services Connect More Than 365 Destinations in NSW, ACT, Victoria and Queensland
Go directly to the timetable Dubbo Tomingley Peak Hill Alectown Central West Euabalong West Condobolin Parkes Orange Town Forbes Euabalong Bathurst Cudal Central Tablelands Lake Cargelligo Canowindra Sydney (Central) Tullibigeal Campbelltown Ungarie Wollongong Cowra Mittagong Lower West Grenfell Dapto West Wyalong Bowral BurrawangRobertson Koorawatha Albion Park Wyalong Moss Vale Bendick Murrell Barmedman Southern Tablelands Illawarra Bundanoon Young Exeter Goulburn Harden Yass Junction Gunning Griffith Yenda Binya BarellanArdlethanBeckomAriah Park Temora Stockinbingal Wallendbeen Leeton Town Cootamundra Galong Sunraysia Yanco BinalongBowning Yass Town ACT Tarago Muttama Harden Town TASMAN SEA Whitton BurongaEuston BalranaldHay Carrathool Darlington Leeton NarranderaGrong GrongMatong Ganmain Coolamon Junee Coolac Murrumbateman turnoff Point Canberra Queanbeyan Gundagai Bungendore Jervis Bay Mildura Canberra Civic Tumut Queanbeyan Bus Interchange NEW SOUTH WALES Tumblong Adelong Robinvale Jerilderie Urana Lockhart Wagga Wondalga Canberra John James Hospital Wagga Batlow VICTORIA Deniliquin Blighty Finley Berrigan Riverina Canberra Hospital The Rock Laurel Hill Batemans Bay NEW SOUTH WALES Michelago Mathoura Tocumwal Henty Tumbarumba MulwalaCorowa Howlong Culcairn Snowy Mountains South Coast Moama Barooga Bredbo Albury Echuca South West Slopes Cooma Wangaratta Berridale Cobram Nimmitabel Bemboka Yarrawonga Benalla Jindabyne Bega Dalgety Wolumla Merimbula VICTORIA Bibbenluke Pambula Seymour Bombala Eden Twofold Bay Broadmeadows Melbourne (Southern Cross) Port Phillip Bay BASS STRAIT Effective from 25 October 2020 Copyright © 2020 Transport for NSW Your Regional train and coach timetable NSW TrainLink Regional train and coach services connect more than 365 destinations in NSW, ACT, Victoria and Queensland. How to use this timetable This timetable provides a snapshot of service information in 24-hour time (e.g. 5am = 05:00, 5pm = 17:00). Information contained in this timetable is subject to change without notice. -

Government Gazette of 28 September 2012
4043 Government Gazette OF THE STATE OF NEW SOUTH WALES Number 100 Friday, 28 September 2012 Published under authority by the Department of Premier and Cabinet LEGISLATION Online notification of the making of statutory instruments Week beginning 17 September 2012 THE following instruments were officially notified on the NSW legislation website (www.legislation.nsw.gov.au) on the dates indicated: Regulations and other statutory instruments Environmental Planning and Assessment Amendment (Contribution Plans) Regulation 2012 (2012-471) — published LW 21 September 2012 Public Finance and Audit Amendment (Prescribed Audits) Regulation 2012 (2012-472) — published LW 21 September 2012 Road Transport (Safety and Traffic Management) Amendment (Removal of Unattended Vehicles) Regulation 2012 (2012-469) — published LW 21 September 2012 Environmental Planning Instruments Hawkesbury Local Environmental Plan 2012 (2012-470) — published LW 21 September 2012 State Environmental Planning Policy Amendment (Miscellaneous) 2012 (2012-473) — published LW 21 September 2012 4044 OFFICIAL NOTICES 28 September 2012 Assents to Acts ACTS OF PARLIAMENT ASSENTED TO Legislative Assembly Office, Sydney, 24 September 2012 IT is hereby notified, for general information, that Her Excellency the Governor has, in the name and on behalf of Her Majesty, this day assented to the undermentioned Acts passed by the Legislative Assembly and Legislative Council of New South Wales in Parliament assembled, viz.: Act No. 65 2012 – An Act to amend the Classification (Publications, Films and Computer Games) Enforcement Act 1995 to provide for the enforcement of an R 18+ classification category for computer games; and for related purpose. [Classification (Publications, Films and Computer Games) Enforcement Amendment (R18+ Computer Games) Bill] Act No. -

Riverina Highway Upgrade Stage Two, Lake Hume Village to Bethanga Bridge July 2017
Riverina Highway Upgrade Stage Two, Lake Hume Village to Bethanga Bridge July 2017 Work on the second stage of the Riverina Highway upgrade will be reduced during the wet winter period for the safety of motorists and to help protect the environment. The NSW Government is funding this $11 million project. Roads and Maritime Services is delivering Stage Most of the earthwork, drainage, kerbing and Two of the Riverina Highway Upgrade project, revegetation were completed before the winter which involves widening the road and road period. The Bethanga Bridge gantry will also be shoulders between Lake Hume Village and upgraded with a new road surface installed at the Bethanga Bridge, improving rough sections of the bridge approaches. road, upgrading signposts, widening drainage, A temporary sealed road surface and line marking installing guardrails and retaining the 80 kilometre will be in place before the winter slow down. Work an hour speed limit. crews will monitor the safety of the road surface Roads and Maritime completed Stage One of the throughout the winter period to ensure it remains total $11 million upgrade between Sandy Creek safe for motorists. and Lake Hume Village in March 2016. Work on the second stage of the upgrade started in October 2016 and is expected to be finished in Project benefits June 2018, weather permitting. Widening the road for improved safety Winter slow down Provide a smoother journey between Work on the upgrade project will slow down for the Lake Hume Village and Bethanga Bridge wet winter period from early July 2017. Improved road drainage The project site of the Stage Two Upgrade is very narrow with steep slopes on either side of the Installing guardrails for increased safety road. -
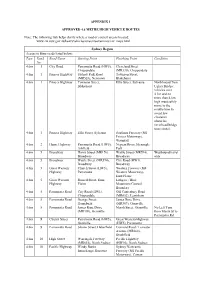
APPENDIX 1 APPROVED 4.6 METRE HIGH VEHICLE ROUTES Note: The
APPENDIX 1 APPROVED 4.6 METRE HIGH VEHICLE ROUTES Note: The following link helps clarify where a road or council area is located: www.rta.nsw.gov.au/heavyvehicles/oversizeovermass/rav_maps.html Sydney Region Access to State roads listed below: Type Road Road Name Starting Point Finishing Point Condition No 4.6m 1 City Road Parramatta Road (HW5), Cleveland Street Chippendale (MR330), Chippendale 4.6m 1 Princes Highway Sydney Park Road Townson Street, (MR528), Newtown Blakehurst 4.6m 1 Princes Highway Townson Street, Ellis Street, Sylvania Northbound Tom Blakehurst Ugly's Bridge: vehicles over 4.3m and no more than 4.6m high must safely move to the middle lane to avoid low clearance obstacles (overhead bridge truss struts). 4.6m 1 Princes Highway Ellis Street, Sylvania Southern Freeway (M1 Princes Motorway), Waterfall 4.6m 2 Hume Highway Parramatta Road (HW5), Nepean River, Menangle Ashfield Park 4.6m 5 Broadway Harris Street (MR170), Wattle Street (MR594), Westbound travel Broadway Broadway only 4.6m 5 Broadway Wattle Street (MR594), City Road (HW1), Broadway Broadway 4.6m 5 Great Western Church Street (HW5), Western Freeway (M4 Highway Parramatta Western Motorway), Emu Plains 4.6m 5 Great Western Russell Street, Emu Lithgow / Blue Highway Plains Mountains Council Boundary 4.6m 5 Parramatta Road City Road (HW1), Old Canterbury Road Chippendale (MR652), Lewisham 4.6m 5 Parramatta Road George Street, James Ruse Drive Homebush (MR309), Granville 4.6m 5 Parramatta Road James Ruse Drive Marsh Street, Granville No Left Turn (MR309), Granville -

Public Road Network
AD O R E I R A C D N A O O O R P ROAD IE O R P A M N R U E A P D L E I F T A H SILV ER C ITY HIGHW Wentworth AY ! O L X EY ROAD RANFURLY W Mildura A !Y STURT HIGHWAY Red Cliffs ! RED C L IF UR ROAD F -MERING S FFS - RED CLI C ! O L MAUDE ROAD I G N A N R AD O A D OE RO ROAD M ANH V U I R R ! A MAUDE Y V Robinvale A L L 3 E Y H 2 IG 7 HW 8 A 3 Y B V R O W N S D Hattah A W HA RO E ! TTAH-RO LE L BINV A L S H IG H D W Mildura A A O Y R E C D O UNNAMED U B A U B N M H N I G A H BA ME W D L A R Y A NA MA LD LLE E H Piangil R V39769 I G WAY O H ! ! A D ED Ouyen Manangatang UNN AM ! M O U L Swan Hill A M Nyah E I ! N B R AR Underbool O RAT ! A TA D R O AD WAY HIGH LLEE MA H Murrayville O ! P NOOR NO E Swan Hill ONG ROAD ORO T S NG ROAD D O ! C AR OAD U A O N G O R D U N D O A N A R R O - W O R A O R A Y G O E D TULLA L Speed S A R O ! P I K A A A O R E ! R N H L A U L O I A IL ROAD N P G SE H C N R H - N I O E A P W L W - A S KE-S V A E A LA N D A ROAD OOK 2 Y V T D W N OA 2 I R O Sea Lake L Y 9 B K OO T O AK A 5 O ! MBA W R O W R A N E 5 D H D U R G R Q O I O RIVERIN H O KE ROAD A K BARHAM A HIG L B L - HWA M Y L A D D U E E A RRA ROAD V39 -S Lake Charm BIT W E 7 N RO R 82 U ! O N SU O COH A NR T ILL D PE A P E RR Y O U IC S H N H NA- O I A A O H W K T O IG A HO UN-SEA LAKE ROAD ! ON PETO H R K-S LAL W BERT-KERA NG ROA O O D Kerang DROOK Woomelang A A O ! V23186 Hopetoun H Y D E ! N BIRCHIP-SEALAKE ROA Gannawarra T Y R AD H O ! O IG A To c u mw a l R D QUAMBAT ! H V11061 ! W IN ROAD B O W D Cohuna URNBRUN A A K RAIN HOPETOU N- Y O R L IL H -

Country Name Contact Address City State Zip Phone Email
Country Name Contact Address City State Zip Phone Email Argentina MEC Team Cesar 25 de mayo 614 Buenos Aires 1602 5491160573377 [email protected] Australia Maxwell Motorsports Alistair Lot 1698 Riverina Highway Finley NSW 2713 0358831315 [email protected] Australia Parts Monster Harry Mason 18 Vivian St. Inverell NSW 2360 61 267214083 [email protected] Australia Robz Ridez Rob 5/6 Enterprise Ave Tweed Heads NSW 2486 0431386232 [email protected] Australia Taree Motorcycles Glen Kelleher 10 Victoria St. Taree NSW 2430 0265524299 [email protected] Australia Maico at Chippy's Paul 310 Kinman Road Traveston QLD 4570 [email protected] Australia Bikes, Books and Bits Richard 7 Tuckett Street Castorton VIC 3311 0438 848366 [email protected] Australia Ridewell Motorcycle Services Paul 11/8-9 Gabrielle Crt Bayswater Nth VIC 3153 61397616682 [email protected] Australia Bultaco Australia Peter Schoene 125 Cowwarr-Walhalla Road Toongabbie Victoria 3856 [email protected] Australia Geoff Morris Concepts Geoff 175 Davis Road Broadford Victoria 3658 357841446 [email protected] Australia Yamaha City Yvette Jones 329 Elizabeth St. Melbourne Victoria 3000 96722500 [email protected] Austria KTM Klassiker Andre Horvath Brauhausstrasse 47 Rannersdorf A-2320 +43/1/768 56 03 [email protected] Belgium Geka Style / VMX Pop Up Shop Geert De Warande 11 Ham none 3945 032475951097 [email protected] Belgium Hobbystock / Alpha Motors Alex Sinterveld 3 Balen none 2490 003274812859 [email protected] -

Recreational Boating Guide Lake Hume
Welcome to > Permission of the water authority Wave Rider you must have a Emergency phone numbers Recreational Boating Guide 2012 Lake Hume is needed to have a boat current NSW Personal Water Craft mooring on the storage. Licence, regardless of the speed All services will respond to NSW AND VICTORIA This boating guide has been > Camping is prohibited except in you travel at. In NSW a PWC can 000 prepared by the Lake Hume If you have a GSM digital mobile phone and you are approved camping areas. only operate between sunrise and LAKE Recreation Co-ordinating sunset. outside your own provider’s GSM network coverage Committee. area then dial 112 as an alternative to 000. Boating regulations VICTORIAN WATERS HUME NOT FOR SALE Tourist information For your safety and that of others A boat licence is required for any all boating is subject to State person operating a powered vessel Information phone numbers A full list of local and regional regulations. Just like the road laws in Victorian waters regardless of MURRA Visitor Information Centres can be the speed of the vessel. A PWC Y R BETHANGA BRIDGE you must know these boating laws IV Boating E NSW found on the subsequent side of and can be fined for breaches. licence is required to operate a R the map. Contact the appropriate personal water craft in either state. NSW Maritime 131 256 APEX PARK WATERS A few key points: Centre to find out tourism For further information regarding Transport Safety Victoria 1800 223 022 > Registration - all power boats information while visiting the area. -

4500 Riverina Highway, Howlong 6.4 Ha - 16 Acre Allotment
“Piercefields” 4500 Riverina Highway, Howlong 6.4 ha - 16 acre allotment The former Mill Hotel Howlong built circa 1870 on a large allotment. A substantial double brick homestead retaining many features of the era in which it was built in need of further refurbishment. $720,000 Contact: Bart Hanrahan M: 0455 583 652| E: [email protected] Property ID: 1604 BRIAN UNTHANK REAL ESTATE “Piercefields” Location Long frontage to Riverina Highway approx. 28 kms from Albury, 2kms from Howlong and 28kms from Corowa. A central location to Albury – Wodonga, Wangaratta and Rutherglen, 300kms to Melbourne. Murray River 1km adjacent to renowned Howlong Country Golf Club. “Piercefields” Land An excellent parcel of sandy loam super soils, with a sloping to the south. Quality soils with tree lines and established shade trees. Some subdivision fencing and very reliable water supply. A bore and town water catchment tanks. Zoned rural living. “Piercefields” Residence Established circa 1870, the double brick homestead was delicensed about 80 years ago and renamed by a former owner, Mr. Robert Walter, after the family estate in England. High skillion roofing and six timber arches across the front veranda typify the period charm exhibited throughout the home. Khaki and cream trims to the exterior promote the heritage style of the home, as do the period fly wire doors. BUR Albury Entry into the lounge room reveals wood dado wall paneling, matching architraves, 640 Olive Street, Albury NSW 2640 colonial windows and a timber ceiling. A mantel sits over the slow combustion T: 02 6041 3777 E: [email protected] heater. -
National Class 1 Agricultural Vehicle and Combination Mass and Dimension Exemption Notice Operator’S Guide
National Class 1 Agricultural Vehicle and Combination Mass and Dimension Exemption Notice Operator’s Guide November 2020 Contents Introduction and preliminary information 3 Special conditions for travel in New South Wales 24 Agricultural vehicles and combinations 6 Special conditions for travel in Queensland 34 Dimension and mass limits 8 Special conditions for travel in South Australia 42 Braking and tow mass ratio requirements 11 Special conditions for travel in Victoria 43 Approved networks and mapped conditions 12 Appendix 1 – New South Wales Agricultural Vehicle Route Assessment 44 Dimension and pilot conditions for allowable night travel 14 Appendix 2 – Sugarcane harvester excluded areas Travel conditions 15 and approved roads 46 Warning device conditions 16 Appendix 3 – Sample list of common agricultural vehicle Pilot vehicles 18 conditions from Schedule 8 of the MDL Regulation 47 Escort vehicle requirements 21 Appendix 4 – Portable road side warning sign designs Special conditions for eligible cotton harvesters 22 for Queensland 52 Special conditions for travel in the Australian Capital Appendix 5 – Road Manager conditions 57 Territory 23 Appendix 6 – Braking performance test 58 2 National Class 1 Agricultural Vehicle and Combination Mass and Dimension Exemption Notice Operator’s Guide Introduction and preliminary information Purpose If travel is not allowed under the Notice This National Class 1 Agricultural Vehicle and Combination If travel is not allowed under the Notice, access may be Mass and Dimension Exemption Notice Operator’s Guide (the possible under a Class 1 mass and/or dimension permit for Guide) complements the National Class 1 Agricultural Vehicle the agricultural vehicle or combination, subject to a granting of and Combination Mass and Dimension Exemption Notice consent by the relevant road manager/s. -

Roads on and East of the Newell Highway Approved for Modular B-Triples Operating at General Mass Limits (GML)
Modular B-Triple Roads on and east of the Newell Highway approved for Modular B-Triples operating at General Mass Limits (GML) The following listed roads are approved for use by Modular B-Triples up to GML operating under a permit and subject to the vehicle and operator meeting all criteria which define the vehicle combination and meeting all conditions of access listed below. State Roads Type Road No Road Name Starting Point Finishing Point Access Condition(s) MB3 HW39 Newell 1km north of HW11 Newell Highway IAP (NSW enrolment) 35m Highway Oxley Highway, (Qld/NSW border), Certified RFS Coonabarabran Goondiwindi NHVAS maintenance MB3 HW12 Gwydir Newell Highway BP Service Centre IAP (NSW enrolment) 35m Highway (Moree Bypass), Inverell 300m east of Certified RFS Moree Jardine Road NHVAS maintenance MB3 HW29 Kamilaroi Newell Highway, Gunnedah Regional IAP (NSW enrolment) 35m Highway Narrabri Saleyards Certified RFS NHVAS maintenance MB3 HW17 Newell Erskine Street Mahers Hill Road, IAP (NSW enrolment) 35m Highway (Golden Highway), Gilgandra Certified RFS Dubbo NHVAS maintenance MB3 HW17 Erskine Street Thompson Street, Cobbora Road IAP (NSW enrolment) 35m Dubbo (Golden Highway), Certified RFS Dubbo NHVAS maintenance MB3 HW39 Newell Tomingley Rest Area, approx IAP (NSW enrolment) 35m Highway Narromine Road, 1km south of Certified RFS Tomingley Tomingley NHVAS maintenance Narromine Road (Opposite the Shell Roadhouse) MB3 HW20 Riverina Newell Highway, Osbourne Street, IAP (NSW enrolment) 35m Highway Finley Berrigan Certified RFS NHVAS maintenance