Automl: a Survey of the State-Of-The-Art
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2020 Vision: Info Pro Skills for a New Decade
2020 Vision: Info Pro Skills for a New Decade Search Skills for Today’s Info Pros and Thriving in the New Information Landscape Presented by: Mary Ellen Bates Bates Information Services BatesInfo.com Presented for: Initiative Fortbildung e.V. 9 and 10 May 2019 2020 VISION DAY 1: Search Skills for Today’s Info Pros INSIDE A SEARCHER’S MIND: BRINGING THE DETECTIVE TO THE SEARCH ..........................................1 TECHNIQUES OF A DETECTIVE ......................................................................................................................2 DIFFERENT SEARCH APPROACHES.................................................................................................................3 GETTING CREATIVE....................................................................................................................................5 WHAT’S NEW (OR AT LEAST USEFUL) WITH GOOGLE: TIPS AND TOOLS FOR TODAY’S GOOGLE .........6 GOOGLE TRICKS........................................................................................................................................6 SEARCHING THE DEEP WEB / GREY LITERATURE ................................................................................8 SEARCH STRATEGIES FOR GREY LITERATURE....................................................................................................9 SOME GREY LIT/DEEP WEB TOOLS.............................................................................................................10 GLEANING INSIGHT FROM SOCIAL MEDIA........................................................................................12 -

Ciência De Dados Na Ciência Da Informação
Ciência da Informação v. 49 n.3 set./dez. 2020 ISSN 0100-1965 eISSN 1518-8353 Edição especial temática Special thematic issue / Edición temática especial Ciência de dados na ciência da informação Data science in Information Sience Ciencia de datos en la Ciencia de la Información Instituto Brasileiro de Informação em Ciência e Tecnologia (Ibict) Diretoria Indexação Cecília Leite Oliveira Ciência da Informação tem seus artigos indexados ou resumidos. Coordenação-Geral de Pesquisa e Desenvolvimento de Novos Produtos (CGNP) Bases Internacionais Anderson Luis Cambraia Itaborahy Directory of Open Access Journals - DOAJ. Paschal Thema: Science de L’Information, Documentation. Library and Coordenação-Geral de Pesquisa e Manutenção de Produtos Consolidados (CGPC) Information Science Abstracts. PAIS Foreign Language Bianca Amaro Index. Information Science Abstracts. Library and Literature. Páginas de Contenido: Ciências de la Información. Coordenação-Geral de Tecnologias de Informação e Informática EDUCACCION: Notícias de Educación, Ciencia y Cultura (CGTI) Tiago Emmanuel Nunes Braga Iberoamericanas. Referativnyi Zhurnal: Informatika. ISTA Information Science & Technology Abstracts. LISTA Library, Coordenação de Ensino e Pesquisa, Ciência e Tecnologia da Information Science & Technology Abstracts. SciELO Informação (COEPPE) Scientific Electronic Library On-line. Latindex – Sistema Gustavo Saldanha Regional de Información em Línea para Revistas Científicas Coordenação de Planejamento, Acompanhamento e Avaliação de América Latina el Caribe, España y Portugal, México. (COPAV) INFOBILA: Información Bibliotecológica Latinoamericana. José Luis dos Santos Nascimento Indexação em Bases de Dados Nacionais Coordenação de Administração (COADM) Reginaldo de Araújo Silva Portal de Periódicos LivRe – Portal de Periódicos de Livre Acesso. Comissão Divisão de Editoração Científica Nacional de Energia Nuclear (Cnen). Portal Periódicos Ramón Martins Sodoma da Fonseca da Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (Capes). -

Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space
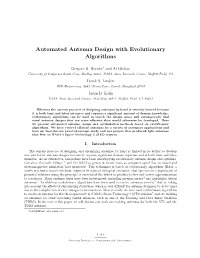
Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space Matthew C. Fontaine Julian Togelius Viterbi School of Engineering Tandon School of Engineering University of Southern California New York University Los Angeles, CA New York City, NY [email protected] [email protected] Stefanos Nikolaidis Amy K. Hoover Viterbi School of Engineering Ying Wu College of Computing University of Southern California New Jersey Institute of Technology Los Angeles, CA Newark, NJ [email protected] [email protected] ABSTRACT We focus on the challenge of finding a diverse collection of quality solutions on complex continuous domains. While quality diver- sity (QD) algorithms like Novelty Search with Local Competition (NSLC) and MAP-Elites are designed to generate a diverse range of solutions, these algorithms require a large number of evaluations for exploration of continuous spaces. Meanwhile, variants of the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) are among the best-performing derivative-free optimizers in single- objective continuous domains. This paper proposes a new QD algo- rithm called Covariance Matrix Adaptation MAP-Elites (CMA-ME). Figure 1: Comparing Hearthstone Archives. Sample archives Our new algorithm combines the self-adaptation techniques of for both MAP-Elites and CMA-ME from the Hearthstone ex- CMA-ES with archiving and mapping techniques for maintaining periment. Our new method, CMA-ME, both fills more cells diversity in QD. Results from experiments based on standard con- in behavior space and finds higher quality policies to play tinuous optimization benchmarks show that CMA-ME finds better- Hearthstone than MAP-Elites. Each grid cell is an elite (high quality solutions than MAP-Elites; similarly, results on the strategic performing policy) and the intensity value represent the game Hearthstone show that CMA-ME finds both a higher overall win rate across 200 games against difficult opponents. -

Long Term Memory Assistance for Evolutionary Algorithms
mathematics Article Long Term Memory Assistance for Evolutionary Algorithms Matej Crepinšekˇ 1,* , Shih-Hsi Liu 2 , Marjan Mernik 1 and Miha Ravber 1 1 Faculty of Electrical Engineering and Computer Science, University of Maribor, 2000 Maribor, Slovenia; [email protected] (M.M.); [email protected] (M.R.) 2 Department of Computer Science, California State University Fresno, Fresno, CA 93740, USA; [email protected] * Correspondence: [email protected] Received: 7 September 2019; Accepted: 12 November 2019; Published: 18 November 2019 Abstract: Short term memory that records the current population has been an inherent component of Evolutionary Algorithms (EAs). As hardware technologies advance currently, inexpensive memory with massive capacities could become a performance boost to EAs. This paper introduces a Long Term Memory Assistance (LTMA) that records the entire search history of an evolutionary process. With LTMA, individuals already visited (i.e., duplicate solutions) do not need to be re-evaluated, and thus, resources originally designated to fitness evaluations could be reallocated to continue search space exploration or exploitation. Three sets of experiments were conducted to prove the superiority of LTMA. In the first experiment, it was shown that LTMA recorded at least 50% more duplicate individuals than a short term memory. In the second experiment, ABC and jDElscop were applied to the CEC-2015 benchmark functions. By avoiding fitness re-evaluation, LTMA improved execution time of the most time consuming problems F03 and F05 between 7% and 28% and 7% and 16%, respectively. In the third experiment, a hard real-world problem for determining soil models’ parameters, LTMA improved execution time between 26% and 69%. -

Cc5212-1 Procesamiento Masivo De Datos Otoño 2020
CC5212-1 PROCESAMIENTO MASIVO DE DATOS OTOÑO 2020 Lecture 4.5 Projects, Practice with Pig/Hadoop Aidan Hogan [email protected] Course Marking (Revised) • 75% for Weekly Labs (~9% a lab) – 4/4 obligatory, 4/7 optional • 25% for Class Project • Need to pass in overall grade Assignments each week Hands-on each week! Working in groups Working in groups! CLASS PROJECTS Class Project • Done in threes • Goal: Use what you’ve learned to do something cool/fun (hopefully) • Process: – Form groups of three (in the forum, before April 30th) – On April 30th we will assign the rest automatically – Start thinking up topics / find interesting datasets! – Register topic (deadline around May 21st) – Work on projects during semester – Deliverables will due be around week 13 • Deliverables: 4 minute presentation (video) & short report • Marked on: Difficulty, appropriateness, scale, good use of techniques, presentation, coolness, creativity, value – Ambition is appreciated, even if you don’t succeed Desiderata for project • Must focus around some technique from the course! • Expected difficulty: similar to a lab, but without any instructions • Data not too small: – Should have >250,000 tuples/entries • Data not too large: – Should have <1,000,000,000 tuples/entries – If very large, perhaps take a sample? • In case of COVID-19 data, we can make exceptions Where to find/explore data? • Kaggle: – https://www.kaggle.com/ • Google Dataset Search: – https://datasetsearch.research.google.com/ • Datos Abiertos de Chile: – https://datos.gob.cl/ – https://es.datachile.io/ • … PRACTICE WITH HADOOP/PIG Practice with Hadoop • Optional Assignment 1 (not evaluated): – Hadoop: Find the number of good movies in which each actor/actresses has starred. -
Automated Antenna Design with Evolutionary Algorithms
Automated Antenna Design with Evolutionary Algorithms Gregory S. Hornby∗ and Al Globus University of California Santa Cruz, Mailtop 269-3, NASA Ames Research Center, Moffett Field, CA Derek S. Linden JEM Engineering, 8683 Cherry Lane, Laurel, Maryland 20707 Jason D. Lohn NASA Ames Research Center, Mail Stop 269-1, Moffett Field, CA 94035 Whereas the current practice of designing antennas by hand is severely limited because it is both time and labor intensive and requires a significant amount of domain knowledge, evolutionary algorithms can be used to search the design space and automatically find novel antenna designs that are more effective than would otherwise be developed. Here we present automated antenna design and optimization methods based on evolutionary algorithms. We have evolved efficient antennas for a variety of aerospace applications and here we describe one proof-of-concept study and one project that produced fight antennas that flew on NASA's Space Technology 5 (ST5) mission. I. Introduction The current practice of designing and optimizing antennas by hand is limited in its ability to develop new and better antenna designs because it requires significant domain expertise and is both time and labor intensive. As an alternative, researchers have been investigating evolutionary antenna design and optimiza- tion since the early 1990s,1{3 and the field has grown in recent years as computer speed has increased and electromagnetics simulators have improved. This techniques is based on evolutionary algorithms (EAs), a family stochastic search methods, inspired by natural biological evolution, that operate on a population of potential solutions using the principle of survival of the fittest to produce better and better approximations to a solution. -
Deepfakes & Disinformation
DEEPFAKES & DISINFORMATION DEEPFAKES & DISINFORMATION Agnieszka M. Walorska ANALYSISANALYSE 2 DEEPFAKES & DISINFORMATION IMPRINT Publisher Friedrich Naumann Foundation for Freedom Karl-Marx-Straße 2 14482 Potsdam Germany /freiheit.org /FriedrichNaumannStiftungFreiheit /FNFreiheit Author Agnieszka M. Walorska Editors International Department Global Themes Unit Friedrich Naumann Foundation for Freedom Concept and layout TroNa GmbH Contact Phone: +49 (0)30 2201 2634 Fax: +49 (0)30 6908 8102 Email: [email protected] As of May 2020 Photo Credits Photomontages © Unsplash.de, © freepik.de, P. 30 © AdobeStock Screenshots P. 16 © https://youtu.be/mSaIrz8lM1U P. 18 © deepnude.to / Agnieszka M. Walorska P. 19 © thispersondoesnotexist.com P. 19 © linkedin.com P. 19 © talktotransformer.com P. 25 © gltr.io P. 26 © twitter.com All other photos © Friedrich Naumann Foundation for Freedom (Germany) P. 31 © Agnieszka M. Walorska Notes on using this publication This publication is an information service of the Friedrich Naumann Foundation for Freedom. The publication is available free of charge and not for sale. It may not be used by parties or election workers during the purpose of election campaigning (Bundestags-, regional and local elections and elections to the European Parliament). Licence Creative Commons (CC BY-NC-ND 4.0) https://creativecommons.org/licenses/by-nc-nd/4.0 DEEPFAKES & DISINFORMATION DEEPFAKES & DISINFORMATION 3 4 DEEPFAKES & DISINFORMATION CONTENTS Table of contents EXECUTIVE SUMMARY 6 GLOSSARY 8 1.0 STATE OF DEVELOPMENT ARTIFICIAL -

Evolutionary Algorithms
Evolutionary Algorithms Dr. Sascha Lange AG Maschinelles Lernen und Naturlichsprachliche¨ Systeme Albert-Ludwigs-Universit¨at Freiburg [email protected] Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (1) Acknowlegements and Further Reading These slides are mainly based on the following three sources: I A. E. Eiben, J. E. Smith, Introduction to Evolutionary Computing, corrected reprint, Springer, 2007 — recommendable, easy to read but somewhat lengthy I B. Hammer, Softcomputing,LectureNotes,UniversityofOsnabruck,¨ 2003 — shorter, more research oriented overview I T. Mitchell, Machine Learning, McGraw Hill, 1997 — very condensed introduction with only a few selected topics Further sources include several research papers (a few important and / or interesting are explicitly cited in the slides) and own experiences with the methods described in these slides. Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (2) ‘Evolutionary Algorithms’ (EA) constitute a collection of methods that originally have been developed to solve combinatorial optimization problems. They adapt Darwinian principles to automated problem solving. Nowadays, Evolutionary Algorithms is a subset of Evolutionary Computation that itself is a subfield of Artificial Intelligence / Computational Intelligence. Evolutionary Algorithms are those metaheuristic optimization algorithms from Evolutionary Computation that are population-based and are inspired by natural evolution.Typicalingredientsare: I A population (set) of individuals (the candidate solutions) I Aproblem-specificfitness (objective function to be optimized) I Mechanisms for selection, recombination and mutation (search strategy) There is an ongoing controversy whether or not EA can be considered a machine learning technique. They have been deemed as ‘uninformed search’ and failing in the sense of learning from experience (‘never make an error twice’). -

Game Playing with Deep Q-Learning Using Openai Gym
Game Playing with Deep Q-Learning using OpenAI Gym Robert Chuchro Deepak Gupta [email protected] [email protected] Abstract sociated with performing a particular action in a given state. This information is fundamental to any reinforcement learn- Historically, designing game players requires domain- ing problem. specific knowledge of the particular game to be integrated The input to our model will be a sequence of pixel im- into the model for the game playing program. This leads ages as arrays (Width x Height x 3) generated by a particular to a program that can only learn to play a single particu- OpenAI Gym environment. We then use a Deep Q-Network lar game successfully. In this project, we explore the use of to output a action from the action space of the game. The general AI techniques, namely reinforcement learning and output that the model will learn is an action from the envi- neural networks, in order to architect a model which can ronments action space in order to maximize future reward be trained on more than one game. Our goal is to progress from a given state. In this paper, we explore using a neural from a simple convolutional neural network with a couple network with multiple convolutional layers as our model. fully connected layers, to experimenting with more complex additions, such as deeper layers or recurrent neural net- 2. Related Work works. The best known success story of classical reinforcement learning is TD-gammon, a backgammon playing program 1. Introduction which learned entirely by reinforcement learning [6]. TD- gammon used a model-free reinforcement learning algo- Game playing has recently emerged as a popular play- rithm similar to Q-learning. -

Reinforcement Learning with Tensorflow&Openai
Lecture 1: Introduction Reinforcement Learning with TensorFlow&OpenAI Gym Sung Kim <[email protected]> http://angelpawstherapy.org/positive-reinforcement-dog-training.html Nature of Learning • We learn from past experiences. - When an infant plays, waves its arms, or looks about, it has no explicit teacher - But it does have direct interaction to its environment. • Years of positive compliments as well as negative criticism have all helped shape who we are today. • Reinforcement learning: computational approach to learning from interaction. Richard Sutton and Andrew Barto, Reinforcement Learning: An Introduction Nishant Shukla , Machine Learning with TensorFlow Reinforcement Learning https://www.cs.utexas.edu/~eladlieb/RLRG.html Machine Learning, Tom Mitchell, 1997 Atari Breakout Game (2013, 2015) Atari Games Nature : Human-level control through deep reinforcement learning Human-level control through deep reinforcement learning, Nature http://www.nature.com/nature/journal/v518/n7540/full/nature14236.html Figure courtesy of Mnih et al. "Human-level control through deep reinforcement learning”, Nature 26 Feb. 2015 https://deepmind.com/blog/deep-reinforcement-learning/ https://deepmind.com/applied/deepmind-for-google/ Reinforcement Learning Applications • Robotics: torque at joints • Business operations - Inventory management: how much to purchase of inventory, spare parts - Resource allocation: e.g. in call center, who to service first • Finance: Investment decisions, portfolio design • E-commerce/media - What content to present to users (using click-through / visit time as reward) - What ads to present to users (avoiding ad fatigue) Audience • Want to understand basic reinforcement learning (RL) • No/weak math/computer science background - Q = r + Q • Want to use RL as black-box with basic understanding • Want to use TensorFlow and Python (optional labs) Schedule 1. -

Latest Snapshot.” to Modify an Algo So It Does Produce Multiple Snapshots, find the Following Line (Which Is Present in All of the Algorithms)
Spinning Up Documentation Release Joshua Achiam Feb 07, 2020 User Documentation 1 Introduction 3 1.1 What This Is...............................................3 1.2 Why We Built This............................................4 1.3 How This Serves Our Mission......................................4 1.4 Code Design Philosophy.........................................5 1.5 Long-Term Support and Support History................................5 2 Installation 7 2.1 Installing Python.............................................8 2.2 Installing OpenMPI...........................................8 2.3 Installing Spinning Up..........................................8 2.4 Check Your Install............................................9 2.5 Installing MuJoCo (Optional)......................................9 3 Algorithms 11 3.1 What’s Included............................................. 11 3.2 Why These Algorithms?......................................... 12 3.3 Code Format............................................... 12 4 Running Experiments 15 4.1 Launching from the Command Line................................... 16 4.2 Launching from Scripts......................................... 20 5 Experiment Outputs 23 5.1 Algorithm Outputs............................................ 24 5.2 Save Directory Location......................................... 26 5.3 Loading and Running Trained Policies................................. 26 6 Plotting Results 29 7 Part 1: Key Concepts in RL 31 7.1 What Can RL Do?............................................ 31 7.2 -

Evolutionary Algorithms in Intelligent Systems
mathematics Editorial Evolutionary Algorithms in Intelligent Systems Alfredo Milani Department of Mathematics and Computer Science, University of Perugia, 06123 Perugia, Italy; [email protected] Received: 17 August 2020; Accepted: 29 August 2020; Published: 10 October 2020 Evolutionary algorithms and metaheuristics are widely used to provide efficient and effective approximate solutions to computationally difficult optimization problems. Successful early applications of the evolutionary computational approach can be found in the field of numerical optimization, while they have now become pervasive in applications for planning, scheduling, transportation and logistics, vehicle routing, packing problems, etc. With the widespread use of intelligent systems in recent years, evolutionary algorithms have been applied, beyond classical optimization problems, as components of intelligent systems for supporting tasks and decisions in the fields of machine vision, natural language processing, parameter optimization for neural networks, and feature selection in machine learning systems. Moreover, they are also applied in areas like complex network dynamics, evolution and trend detection in social networks, emergent behavior in multi-agent systems, and adaptive evolutionary user interfaces to mention a few. In these systems, the evolutionary components are integrated into the overall architecture and they provide services to the specific algorithmic solutions. This paper selection aims to provide a broad view of the role of evolutionary algorithms and metaheuristics in artificial intelligent systems. A first relevant issue discussed in the volume is the role of multi-objective meta-optimization of evolutionary algorithms (EA) in continuous domains. The challenging tasks of EA parameter tuning are the many different details that affect EA performance, such as the properties of the fitness function as well as time and computational constraints.