What Is Area Navigation? Module 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RNAV Instrument Approach Procedures (IAP's) and the New Charting Format
Effective: Until Further Notice Area Navigation Systems Area Navigation (RNAV)/Wide Area Augmentation System (WAAS) Instrument Approach Procedures (IAP’s) and the New Charting Format. [REVISED 1/5/00] PURPOSE. Instrument procedures in the first half of the 21st century will be based on satellite navigation, also known as Global Navigation Satellite System (GNSS). Within the United States, the Global Positioning System (GPS), the Wide Area Augmentation system (WAAS), and the Local Area Augmentation System (LAAS) will comprise the primary components of the GNSS. Air navigation is increasingly dependent upon RNAV systems - as exemplified by Flight Management System (FMS) and Global Positioning System (GPS) avionics. These systems navigate with reference to geographic positions called “waypoints” (WP) specified in latitude/longitude rather than to/from a specific ground-based navigation aid. Reliance on RNAV systems for approach and departure operations will increase as new systems such as WAAS are developed and deployed. To foster and support full and optimal integration of RNAV into the National Airspace System (NAS), the FAA has developed a new procedure type for RNAV IAP’s. This Notice serves to inform the flying public of the new concepts being implemented with the RNAV IAP’s. OPERATIONS. In order to avoid unnecessary duplication and proliferation of instrument approach charts, Jeppesen will publish approach minimums for unaugmented GPS and WAAS (when operational) on the same chart. In addition, approach minimums will be established and published for LNAV/ VNAV - a new type of RNAV instrument approach with lateral and vertical navigation. The approach chart will be titled "RNAV RWY XX." The chart may contain as many as four columns of approach minimums: GLS; LNAV/VNAV; LNAV; and CIRCLING. -
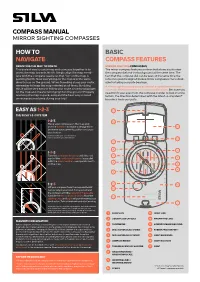
Silva Manual- Mirror Sighting Compasses
COMPASSHOW MANUAL TO MIRROR SIGHTING COMPASSES NAVIGATEHOW TO BASIC NAVIGATE COMPASS FEATURES HOWORIENTING TO THE MAP TO NORTH MIRROR SIGHTING COMPASSES EASYThe easiest way to use a map and compass AS together is to The mirror compass features a mirror that allows you to view orient the map towards North. Simply align the map merid- the compass dial and the background at the same time. The ians with the compass needle so that “up” on the map is fact that the compass dial can be seen at the same time the pointing North. Now everything on the map is in the same reference point is aligned makes mirror compasses more desir- NAVIGATEdirection as on the ground. When travelling along your route, able for taking accurate bearings. remember to keep the map oriented at all times. By doing A mirror-sighting compass is at its best in open terrain where 1-2-3this it will be very easy to follow your route since turning right you must determine direction over long distances. Because you on the map also means turning right on the ground! Properly needn’t lift your eyes from the compass in order to look into the orienting1-2-3 the map is quick, easy1-2 and-3 the best way to avoid1-2- 3 terrain, the direction determined with the Silva 1-2-3 System® HOW TOunnecessaryPlace your compass mistakes on the map duringTurn your the compass trip! housing until the Lift your compass frombecomes the map more accurate. and use the baseline to make a red part of the north/south arrow and hold it horizontally in your EASYstraight line between AS your current is parallel with the map meridians, hand. -

AEN-88: the Global Positioning System
AEN-88 The Global Positioning System Tim Stombaugh, Doug McLaren, and Ben Koostra Introduction cies. The civilian access (C/A) code is transmitted on L1 and is The Global Positioning System (GPS) is quickly becoming freely available to any user. The precise (P) code is transmitted part of the fabric of everyday life. Beyond recreational activities on L1 and L2. This code is scrambled and can be used only by such as boating and backpacking, GPS receivers are becoming a the U.S. military and other authorized users. very important tool to such industries as agriculture, transporta- tion, and surveying. Very soon, every cell phone will incorporate Using Triangulation GPS technology to aid fi rst responders in answering emergency To calculate a position, a GPS receiver uses a principle called calls. triangulation. Triangulation is a method for determining a posi- GPS is a satellite-based radio navigation system. Users any- tion based on the distance from other points or objects that have where on the surface of the earth (or in space around the earth) known locations. In the case of GPS, the location of each satellite with a GPS receiver can determine their geographic position is accurately known. A GPS receiver measures its distance from in latitude (north-south), longitude (east-west), and elevation. each satellite in view above the horizon. Latitude and longitude are usually given in units of degrees To illustrate the concept of triangulation, consider one satel- (sometimes delineated to degrees, minutes, and seconds); eleva- lite that is at a precisely known location (Figure 1). If a GPS tion is usually given in distance units above a reference such as receiver can determine its distance from that satellite, it will have mean sea level or the geoid, which is a model of the shape of the narrowed its location to somewhere on a sphere that distance earth. -

Environmental Geocaching: Learning Through Nature and Technology
WSFNR-20-67A September 2020 ENVIRONMENTAL GEOCACHING: LEARNING THROUGH NATURE AND TECHNOLOGY Brady Self, Associate Extension Professor, Department of Forestry, Mississippi State University Jason Gordon, Assistant Professor, Warnell School of Forestry & Natural Resources, University of Georgia Parents, natural resource professionals and enthusiasts, and youth coordinators often find themselves at a loss when trying to encour- age younger generations to take up outdoor pastimes. The allure of electronic technology, team sports, combined with time availability of parents sometimes limits overall involve- ment of today’s youth in more traditional outdoor activities. In this fast-paced world, learning about nature and what occurs in the forest seems to be losing ground when competing for adolescents’ interest and time. The good news is that there are still many op- portunities to involve youth in the outdoors. The game of geocaching provides one of these opportunities. Geocaching offers learning and fun while spending time in nature. Geocaching is an outdoor treasure hunting game that operates much like the scavenger hunting that many parents and grandparents remember from their youth. The game adds the use of GPS technology (either a dedi- cated receiver unit, or more commonly, a GPS-enabled smartphone) to guide players to locations where individual geocaches are hidden. Clues are then used to search for the geocache. Geocaches can be selected or created with a theme focused on learning about forests, wildlife, and other natural resources. These experiences are then shared online in the geocaching community. The overall objective of the activity is to guide participants to places of significance where they have the opportu- nity to learn something about that particular location or geocache topic. -

Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains
Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains James Neufeld Jason Roberts Stephen Walsh University of Alberta University of Alberta University of Alberta 114 St - 89 Ave 114 St - 89 Ave 114 St - 89 Ave Edmonton, Alberta Edmonton, Alberta Edmonton, Alberta [email protected] [email protected] [email protected] Michael Sokolsky Adam Milstein Michael Bowling University of Alberta University of Waterloo University of Alberta 114 St - 89 Ave 200 University Avenue West 114 St - 89 Ave Edmonton, Alberta Waterloo, Ontario Edmonton, Alberta [email protected] [email protected] [email protected] ABSTRACT ticipants use a handheld GPS to aid in ¯nding an object This paper describes an autonomous robot system designed hidden in an unknown environment given only the object's to solve the challenging task of geocaching. Geocaching GPS coordinates. Typically the objects are placed in unde- involves locating a goal object in an outdoor environment veloped areas with no obvious roads or paths. Natural ob- given only its rough GPS position. No additional informa- stacles along with the lack of any map of the terrain make tion about the environment such as road maps, waypoints, it a challenging navigation problem even for humans. In ad- or obstacle descriptions is provided, nor is there often a sim- dition, due to the error in GPS position estimates, a search ple straight line path to the object. This is in contrast to is usually required to ¯nally locate the object even after the much of the research in robot navigation which often focuses GPS coordinate has been reached. -

Performance-Based Navigation (PBN)
What Is PBN? Evolution to PBN Performance-Based Navigation (PBN) is comprised Current Ground NAVAIDs RNAV RNP Federal Aviation of Area Navigation (RNAV) and Required Navigation Waypoints Administration Performance (RNP) and describes an aircraft’s capa- Seamless Vertical bility to navigate using performance standards. Path What Is RNAV? “Curved” Paths RNAV enables aircraft to fly on any desired flight path within the coverage of ground- or spaced-based navigation aids, within the limits of the capability of Limited Design Increased Airspace Highly Optimized the self-contained systems, or a combination of both Flexibility Efficiency Use of Airspace Performance-Based capabilities. RNAV aircraft have better access and flexibility for point-to-point operations. Navigation (PBN) Resources What Is OPD? FAA RNAV/RNP Group Web Site Optimized Profile Descent (OPD) is designed to http://faa.gov/ato?k=pbn reduce fuel consumption, emissions, and noise dur- ing descent by allowing pilots to set aircraft engines FAA Next Generation Air Transportation System near idle throttle while they descend. OPDs use the http://www.faa.gov/about/initiatives/nextgen capabilities of the aircraft Flight Management System to fly a continuous, descending path without level seg- ICAO PBN Programme Office ments. Where possible, we are implementing OPDs www.icao.int/pbn with RNAV to make them environmentally-friendly or “green.” Contact us at: [email protected] What Is RNP? RNP is RNAV with the addition of an onboard perfor- mance monitoring and alerting capability. A defining characteristic of RNP operations is the ability of the aircraft navigation system to monitor the navigation performance it achieves and inform the crew if the requirement is not met during an operation. -
Military Map Reading V2.0
MILITARY MAP READING This booklet is to help qualified Defence Map Reading instructors in unit map reading training and testing. The primary source is the Manual of Map Reading and Land Navigation, Army Code 71874.Issue 1.0: Apr 2009. The booklet can be used by all ranks of HM Forces (RN, RM, Army and RAF) for study and revision. It is suggested that a map of the local area be obtained for practical work and for the study of Conventional signs, which are intentionally NOT covered in this booklet. Comments and queries should be addressed to: Senior Instructor, Geospatial Information Management Wing Royal School of Military Survey, Defence Intelligence Security Centre, Denison Barracks (SU 498 729) Hermitage, THATCHAM, Berkshire, RG18 9TP © Crown copyright. All rights reserved ICG 100015347 2007 Version 2.0 Dated December 2010. 1 MILITARY MAP READING INDEX CHAPTER 1: MAP READING FUNDAMENTALS Maps and the grid system 3 Grid references 3 MGRS 5 Romers 6 GPS 7 Scale 8 Estimating and measuring distances 9 Contours 11 The shape of the ground 12 Bearings 15 Compass distances from ferrous metal 17 CHAPTER 2: NAVIGATION EQUIPMENT The compass LW 18 The prismatic compass 20 The RA protractor 22 CHAPTER 3: TECHNIQUES AND SKILLS Relating map and ground 24 Using a lightweight compass to set a map 26 Finding a location by LW Intersection 27 Plotting back bearings-LW/RA protractor 28 Finding your location by LW resection 29 Finding direction by sun and stars 30 CHAPTER 4: ROUTE SELECTION Factors for route selection 34 Other planning factors 35 Route cards -

Overview of the BDS III Signals
2018/11/17 13th Stanford PNT Symposium Overview of the BDS III Signals Mingquan Lu Tsinghua University November 8, 2018 Outline 1. Introduction The Three-step Development Plan A Brief History of BDS Development The Evolution of BDS Signals Current Status 2. Brief Description of BDS III 3. New Signals of BDS III 4. Conclusion 1 2018/11/17 The Three-step Development Plan BDS program began in the 1990s. In order to overcome various difficulties, China formulated the following three- step development plan for BDS, from active to passive, from regional to global. BDS I BDS II BDS III Experimental System Regional System Global System 2000 IOC, 2003 FOC 2010 IOC, 2012 FOC 2018 IOC, 2020 FOC 3GEO 5GEO+5IGSO+4MEO 3GEO+3IGSO+24MEO Regional Coverage Regional Coverage Global Coverage RDSS Service RDSS/RNSS Service RDSS/RNSS/SBAS Service 3 The Three-step Development Plan Step 3 (BDS III) Start the development of Step 2 (BDS II) the BDS Global System (BDS III) in 2013 to Start the development of achieve global passive Step 1 (BDS I) the BDS Regional System PNT capability by (BDS II, also known as approximately 2020. Start the development of BD-II in earlier times) in the BDS Experimental 2004 to achieve regional System (BDS I, also passive PNT capability by known as BD-I in earlier 2012. times) in 1994 to achieve regional active PNT capability by 2000. 4 2 2018/11/17 A Brief History of BDS Development The Early Active System BDS I——BDS Experimental System BDS I BDS I was established in 2000 as the first Experimental System generation of China’s navigation satellite system. -

An Overview of Global Positioning System (GPS)
Technical Article February 2012 | page 1 An Overview of Global Positioning System (GPS) The Global Positioning System (GPS) is a satellite–based radio–navigation system. GPS provides reliable positioning, navigation, and timing services to users on a continuous worldwide basis. The satellite system was built by the United States, but its services are freely available to everyone on the planet. For anyone with a GPS receiver, the system provides location and time. GPS provides accurate location and time information for an unlimited number of people in all weather, day or night, anywhere in the world. The GPS is made up of three parts: satellites orbiting the Earth; control and monitoring stations on Earth; and the GPS receivers (either stand–alone devices or integrated sub–systems) operated by users. GPS satellites broadcast continuous signals which are picked up and identified by GPS receivers. Each GPS receiver then provides three–dimensional location information (latitude, longitude, and altitude), plus the current time. Equipped with a GPS receiver, any user can accurately locate where they are and easily navigate to where they want to go, whether walking, driving, flying, or boating. GPS has become an important part of transportation systems worldwide, providing navigation for aviation, ground, and maritime operations. Disaster relief and emergency service agencies depend upon GPS for location and timing capabilities in their life–saving missions. Everyday activities such as banking, mobile phone operations, and even the control of power grids, are facilitated by the accurate timing provided by GPS. Farmers, surveyors, geologists and countless others perform their work more efficiently, safely, economically, and accurately using the free and open GPS signals. -
Chapter: 4. Approaches
Chapter 4 Approaches Introduction This chapter discusses general planning and conduct of instrument approaches by pilots operating under Title 14 of the Code of Federal Regulations (14 CFR) Parts 91,121, 125, and 135. The operations specifications (OpSpecs), standard operating procedures (SOPs), and any other FAA- approved documents for each commercial operator are the final authorities for individual authorizations and limitations as they relate to instrument approaches. While coverage of the various authorizations and approach limitations for all operators is beyond the scope of this chapter, an attempt is made to give examples from generic manuals where it is appropriate. 4-1 Approach Planning within the framework of each specific air carrier’s OpSpecs, or Part 91. Depending on speed of the aircraft, availability of weather information, and the complexity of the approach procedure Weather Considerations or special terrain avoidance procedures for the airport of intended landing, the in-flight planning phase of an Weather conditions at the field of intended landing dictate instrument approach can begin as far as 100-200 NM from whether flight crews need to plan for an instrument the destination. Some of the approach planning should approach and, in many cases, determine which approaches be accomplished during preflight. In general, there are can be used, or if an approach can even be attempted. The five steps that most operators incorporate into their flight gathering of weather information should be one of the first standards manuals for the in-flight planning phase of an steps taken during the approach-planning phase. Although instrument approach: there are many possible types of weather information, the primary concerns for approach decision-making are • Gathering weather information, field conditions, windspeed, wind direction, ceiling, visibility, altimeter and Notices to Airmen (NOTAMs) for the airport of setting, temperature, and field conditions. -

A Cognitive Model of Strategies for Cardinal Direction Judgments
SPATIAL COGNITION AND COMPUTATION, 7(2), 179–212 Copyright © 2007, Lawrence Erlbaum Associates, Inc. A Cognitive Model of Strategies for Cardinal Direction Judgments Leo Gugerty and William Rodes Psychology Department, Clemson University, Clemson, SC ABSTRACT Previous research has identified a variety of strategies used by novice and experienced navigators in making cardinal direction judgments (Gugerty, Brooks, & Treadaway, 2004). We developed an ACT-R cognitive model of some of these strategies that instantiated a number of concepts from research in spatial cognition, including a visual-short-term-memory buffer overlaid on a perceptual buffer, an egocentric ref- erence frame in visual-short-term-memory, storage of categorical spatial information in visual-short-term-memory, and rotation of a mental compass in visual-short-term- memory. Response times predicted by the model fit well with the data of two groups, college students (N D 20) trained and practiced in the modeled strategies, and jet pilots (N D 4) with no strategy training. Thus, the cognitive model seems to pro- vide an accurate description of important strategies for cardinal direction judgments. Additionally, it demonstrates how theoretical constructs in spatial cognition can be applied to a complex, realistic navigation task. Keywords: cardinal directions, cognitive modeling, visual short term memory. INTRODUCTION This project focuses on understanding the cognitive processes and structures people use in making a particular type of navigational judgment—using a map to determine the cardinal direction between two objects in the environment. We first developed a cognitive model of some of the strategies people use in making this type of cardinal direction judgment. -

Land Navigation, Compass Skills & Orienteering = Pathfinding
LAND NAVIGATION, COMPASS SKILLS & ORIENTEERING = PATHFINDING TABLE OF CONTENTS 1. LAND NAVIGATION, COMPASS SKILLS & ORIENTEERING-------------------p2 1.1 FIRST AID 1.2 MAKE A PLAN 1.3 WHERE ARE YOU NOW & WHERE DO YOU WANT TO GO? 1.4 WHAT IS ORIENTEERING? What is LAND NAVIGATION? WHAT IS PATHFINDING? 1.5 LOOK AROUND YOU WHAT DO YOU SEE? 1.6 THE TOOLS IN THE TOOLBOX MAP & COMPASS PLUS A FEW NICE THINGS 2 HOW TO USE A COMPASS-------------------------------------------p4 2.1 2.2 PARTS OF A COMPASS 2.3 COMPASS DIRECTIONS 2.4 HOW TO USE A COMPASS 2.5 TAKING A BEARING & FOLLOWING IT 3 TOPOGRAPHIC MAP THE BASICS OF MAP READING---------------------p8 3.1 TERRAIN FEATURES- 3.2 CONTOUR LINES & ELEVATION 3.3 TOPO MAP SYMBOLS & COLORS 3.4 SCALE & DISTANCE MEASURING ON A MAP 3.5 HOW TO ORIENT A MAP 3.6 DECLINATION 3.7 SUMMARY OF COMPASS USES & TIPS FOR USING A COMPASS 4 DIFFERENT TYPES OF MAPS----------------------------------------p13 4.1 PLANIMETRIC 4.2 PICTORIAL 4.3 TOPOGRAPHIC(USGS, FOREST SERVICE & NATIONAL PARK) 4.4 ORIENTIEERING MAP 4.5 WHERE TO GET MAPS ON THE INTERNET 4.6 HOW TO MAKE YOUR OWN ORIENTEERING MAP 5 LAND NAVIGATION & ORIENTEERING--------------------------------p14 5.1 WHAT IS ORIENTEERING? 5.2 Orienteering as a sport 5.3 ORIENTEERING SYMBOLS 5.4 ORIENTERING VOCABULARY 6 ORIENTEERING-------------------------------------------------p17 6.1 CHOOSING YOUR COURSE COURSE LEVELS 6.2 DOING YOUR COURSE 6.3 CONTROL DESCRIPTION CARDS 6.4 CONTROL DESCRIPTIONS 6.5 GPS A TOOL OR A CRUTCH? 7 THINGS TO REMEMBER-------------------------------------------p22