Mission to the Trojan Asteroids: Lessons Learned During a JPL Planetary Science Summer School Mission Design Exercise
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solar System Tests of the Equivalence Principle and Constraints on Higher-Dimensional Gravity
Solar system tests of the equivalence principle and constraints on higher-dimensional gravity J. M. Overduin Department of Physics, University of Waterloo, ON, Canada N2L 3G1 and Gravity Probe B, Hansen Experimental Physics Laboratory, Stanford University, California (July 21, 2000) the theory, ξ and αk refer to possible preferred-location In most studies of equivalence principle violation by solar and preferred-frame effects, and the ζk allow for possible system bodies, it is assumed that the ratio of gravitational to violations of momentum conservation (see [1] for discus- inertial mass for a given body deviates from unity by a param- sion). One has η = 0 in standard general relativity, where eter ∆ which is proportional to its gravitational self-energy. γ = β = 1. In 4D scalar-tensor theories, by contrast, Here we inquire what experimental constraints can be set on γ =(1+ω)/(2 + ω)andβ =1+ω /[2(2 + ω)(3 + 2ω)2], ∆ for various solar system objects when this assumption is re- 0 laxed. Extending an analysis originally due to Nordtvedt, we where ω = ω(φ) is the generalized Brans-Dicke parame- obtain upper limits on linearly independent combinations of ter and ω0 = dω/dφ. ∆ for two or more bodies from Kepler’s third law, the position The relative gravitational self-energy U can be cal- of Lagrange libration points, and the phenomenon of orbital culated for most objects in the solar system, subject polarization. Combining our results, we extract numerical to uncertainties in their mass density profiles. Thus, 5 upper bounds on ∆ for the Sun, Moon, Earth and Jupiter, for example, US 10− for the Sun, while Jupiter 8 ∼− using observational data on their orbits as well as those of the has UJ 10− [3]. -

Thermal-IR Spectral Analysis of Jupiter's Trojan Asteroids
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 1238.pdf THERMAL-IR SPECTRAL ANALYSIS OF JUPITER’S TROJAN ASTEROIDS: DETECTING SILICATES. A. C. Martin1, J. P. Emery1, S. S. Lindsay2, 1The University of Tennessee Earth and Planetary Science Department, 1621 Cumberland Avenue, 602 Strong Hall, Knoxville TN, 37996, 2The University of Tennessee, De- partment of Physics, 1408 Circle Drive, Knoxville TN, 37996.. Introduction: Jupiter’s Trojan asteroids (hereafter (e.g., [11],[8]). Had Trojans and JFCs formed in the Trojans) populate Jupiter’s L4 and L5 Lagrange points. same region, Trojans should have fine-grained silicates The L4 and L5 points are dynamically stable over the in primarily amorphous phases. lifetime of the Solar System, and, therefore, Trojans Analysis of TIR spectra by [12] shows that the sur- could have resided in the L4 and L5 regions for nearly faces of three Trojans (624 Hektor, 1172 Aneas, and 911 4.5 Gyr [1]. However, it is still uncertain where the Tro- Agamemnon) have emissivity features similar to fine- jans formed and when they were captured. Asteroid or- grained silicates in comet comae. The TIR wavelength igins provide an effective means of constraining the region is beneficial for silicate mineralogy detection be- events that dynamically shaped the solar system. Tro- cause it contains fundamental Si-O molecular vibrations jans may help in determining the extent of radial mixing (stretching at 9 –12 µm and bending at 14 – 25 µm; that occurred during giant planet migration. [13]). Comets produce optically thin comae that result Trojans are thought to have formed in one of two in strong 10-µm emission features when comprised of locations: (1) in their current position (~5.2 AU), or (2) fine-grained (≤10 to 20 µm) dispersed silicates. -

Occultation Newsletter Volume 8, Number 4
Volume 12, Number 1 January 2005 $5.00 North Am./$6.25 Other International Occultation Timing Association, Inc. (IOTA) In this Issue Article Page The Largest Members Of Our Solar System – 2005 . 4 Resources Page What to Send to Whom . 3 Membership and Subscription Information . 3 IOTA Publications. 3 The Offices and Officers of IOTA . .11 IOTA European Section (IOTA/ES) . .11 IOTA on the World Wide Web. Back Cover ON THE COVER: Steve Preston posted a prediction for the occultation of a 10.8-magnitude star in Orion, about 3° from Betelgeuse, by the asteroid (238) Hypatia, which had an expected diameter of 148 km. The predicted path passed over the San Francisco Bay area, and that turned out to be quite accurate, with only a small shift towards the north, enough to leave Richard Nolthenius, observing visually from the coast northwest of Santa Cruz, to have a miss. But farther north, three other observers video recorded the occultation from their homes, and they were fortuitously located to define three well- spaced chords across the asteroid to accurately measure its shape and location relative to the star, as shown in the figure. The dashed lines show the axes of the fitted ellipse, produced by Dave Herald’s WinOccult program. This demonstrates the good results that can be obtained by a few dedicated observers with a relatively faint star; a bright star and/or many observers are not always necessary to obtain solid useful observations. – David Dunham Publication Date for this issue: July 2005 Please note: The date shown on the cover is for subscription purposes only and does not reflect the actual publication date. -

Ty996i the Astronomical Journal Volume 71, Number
coPC THE ASTRONOMICAL JOURNAL VOLUME 71, NUMBER 6 AUGUST 1966 TY996I Observations of Comets, Minor Planets, and Satellites Elizabeth Roemer* and Richard E. Lloyd U. S. Naval Observatory, Flagstaff Station, Arizona (Received 10 May 1966) Accurate positions and descriptive notes are presented for 38 comets, 33 minor planets, 5 faint natural satellites, and Pluto, for which astrometric reduction of the series of Flagstaff observations has been completed. THE 1022 positions and descriptive notes presented reference star positions; therefore, she bears responsi- here supplement those given by Roemer (1965), bility for the accuracy of the results given here. who also described the program, the equipment used, Coma diameters and tail dimensions given in the and the procedures of observation and of reduction. Notes to Table I refer to the exposures taken for In this paper as in the earlier one, the participation astrometric purposes unless otherwise stated. In of those who shared in critical phases of the work is general, longer exposures show more extensive head and indicated in the Obs/Meas column of Table I according tail structure. to the following letters: For brighter comets the minimum exposure is determined by the necessity of recording measurable R=Elizabeth Roemer. images of 12th-13th magnitude reference stars. On Part-time assistants under contract Nonr-3342(00) such exposures the position of the nuclear condensation with Lowell Observatory: may be more or less obscured by the overexposed coma and be correspondingly difficult and uncertain to L = Richard E. Lloyd, measure. T = Maryanna Thomas, A colon has been used to indicate greater than normal S = Marjorie K. -

On the Accuracy of Restricted Three-Body Models for the Trojan Motion
DISCRETE AND CONTINUOUS Website: http://AIMsciences.org DYNAMICAL SYSTEMS Volume 11, Number 4, December 2004 pp. 843{854 ON THE ACCURACY OF RESTRICTED THREE-BODY MODELS FOR THE TROJAN MOTION Frederic Gabern1, Angel` Jorba1 and Philippe Robutel2 Departament de Matem`aticaAplicada i An`alisi Universitat de Barcelona Gran Via 585, 08007 Barcelona, Spain1 Astronomie et Syst`emesDynamiques IMCCE-Observatoire de Paris 77 Av. Denfert-Rochereau, 75014 Paris, France2 Abstract. In this note we compare the frequencies of the motion of the Trojan asteroids in the Restricted Three-Body Problem (RTBP), the Elliptic Restricted Three-Body Problem (ERTBP) and the Outer Solar System (OSS) model. The RTBP and ERTBP are well-known academic models for the motion of these asteroids, and the OSS is the standard model used for realistic simulations. Our results are based on a systematic frequency analysis of the motion of these asteroids. The main conclusion is that both the RTBP and ERTBP are not very accurate models for the long-term dynamics, although the level of accuracy strongly depends on the selected asteroid. 1. Introduction. The Restricted Three-Body Problem models the motion of a particle under the gravitational attraction of two point masses following a (Keple- rian) solution of the two-body problem (a general reference is [17]). The goal of this note is to discuss the degree of accuracy of such a model to study the real motion of an asteroid moving near the Lagrangian points of the Sun-Jupiter system. To this end, we have considered two restricted three-body problems, namely: i) the Circular RTBP, in which Sun and Jupiter describe a circular orbit around their centre of mass, and ii) the Elliptic RTBP, in which Sun and Jupiter move on an elliptic orbit. -

Comparison of the Physical Properties of the L4 and L5 Trojan Asteroids from ATLAS Data
Draft version January 13, 2021 Typeset using LATEX default style in AASTeX62 Comparison of the physical properties of the L4 and L5 Trojan asteroids from ATLAS data A. McNeill,1 N. Erasmus,2 D.E. Trilling,1, 2 J.P. Emery,1 J. L. Tonry,3 L. Denneau,3 H. Flewelling,3 A. Heinze,3 B. Stalder,4 and H.J. Weiland3 1Department of Astronomy and Planetary Science, Northern Arizona University, Flagstaff, AZ 86011, USA 2South African Astronomical Observatory, Cape Town, 7925, South Africa. 3Institute for Astronomy, University of Hawaii, Honolulu, HI 9682, USA. 4Vera C. Rubin Observatory Project Office, 950 N. Cherry Ave, Tucson, AZ, USA ABSTRACT Jupiter has nearly 8000 known co-orbital asteroids orbiting in the L4 and L5 Lagrange points called Jupiter Trojan asteroids. Aside from the greater number density of the L4 cloud the two clouds are in many ways considered to be identical. Using sparse photometric data taken by the Asteroid Terrestrial-impact Last Alert System (ATLAS) for 863 L4 Trojans and 380 L5 Trojans we derive the shape distribution for each of the clouds and find that, on average, the L4 asteroids are more elongated than the L5 asteroids. This shape difference is most likely due to the greater collision rate in the L4 cloud that results from its larger population. We additionally present the phase functions and c − o colours of 266 objects. Keywords: Jupiter trojans | multi-color photometry | sky surveys 1. INTRODUCTION Jupiter Trojans are minor planets that orbit 60 degrees ahead of (L4) and behind (L5) Jupiter in the 1:1 resonant Lagrange points. -

HUBBLE ULTRAVIOLET SPECTROSCOPY of JUPITER TROJANS Ian Wong1†, Michael E
Draft version March 11, 2019 Preprint typeset using LATEX style emulateapj v. 12/16/11 HUBBLE ULTRAVIOLET SPECTROSCOPY OF JUPITER TROJANS Ian Wong1y, Michael E. Brown2, Jordana Blacksberg3, Bethany L. Ehlmann2,3, and Ahmed Mahjoub3 1Department of Earth, Atmospheric, and Planetary Sciences, Massachusetts Institute of Technology, Cambridge, MA 02139, USA; [email protected] 2Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125, USA 3Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA y51 Pegasi b Postdoctoral Fellow Draft version March 11, 2019 ABSTRACT We present the first ultraviolet spectra of Jupiter Trojans. These observations were carried out using the Space Telescope Imaging Spectrograph on the Hubble Space Telescope and cover the wavelength range 200{550 nm at low resolution. The targets include objects from both of the Trojan color sub- populations (less-red and red). We do not observe any discernible absorption features in these spectra. Comparisons of the averaged UV spectra of less-red and red targets show that the subpopulations are spectrally distinct in the UV. Less-red objects display a steep UV slope and a rollover at around 450 nm to a shallower visible slope, whereas red objects show the opposite trend. Laboratory spectra of irradiated ices with and without H2S exhibit distinct UV absorption features; consequently, the featureless spectra observed here suggest H2S alone is not responsible for the observed color bimodal- ity of Trojans, as has been previously hypothesized. We propose some possible explanations for the observed UV-visible spectra, including complex organics, space weathering of iron-bearing silicates, and masked features due to previous cometary activity. -

Astrocladistics of the Jovian Trojan Swarms
MNRAS 000,1–26 (2020) Preprint 23 March 2021 Compiled using MNRAS LATEX style file v3.0 Astrocladistics of the Jovian Trojan Swarms Timothy R. Holt,1,2¢ Jonathan Horner,1 David Nesvorný,2 Rachel King,1 Marcel Popescu,3 Brad D. Carter,1 and Christopher C. E. Tylor,1 1Centre for Astrophysics, University of Southern Queensland, Toowoomba, QLD, Australia 2Department of Space Studies, Southwest Research Institute, Boulder, CO. USA. 3Astronomical Institute of the Romanian Academy, Bucharest, Romania. Accepted XXX. Received YYY; in original form ZZZ ABSTRACT The Jovian Trojans are two swarms of small objects that share Jupiter’s orbit, clustered around the leading and trailing Lagrange points, L4 and L5. In this work, we investigate the Jovian Trojan population using the technique of astrocladistics, an adaptation of the ‘tree of life’ approach used in biology. We combine colour data from WISE, SDSS, Gaia DR2 and MOVIS surveys with knowledge of the physical and orbital characteristics of the Trojans, to generate a classification tree composed of clans with distinctive characteristics. We identify 48 clans, indicating groups of objects that possibly share a common origin. Amongst these are several that contain members of the known collisional families, though our work identifies subtleties in that classification that bear future investigation. Our clans are often broken into subclans, and most can be grouped into 10 superclans, reflecting the hierarchical nature of the population. Outcomes from this project include the identification of several high priority objects for additional observations and as well as providing context for the objects to be visited by the forthcoming Lucy mission. -

An Automated Search Procedure to Generate Optimal Low-Thrust Rendezvous Tours of the Sun-Jupiter Trojan Asteroids
AN AUTOMATED SEARCH PROCEDURE TO GENERATE OPTIMAL LOW-THRUST RENDEZVOUS TOURS OF THE SUN-JUPITER TROJAN ASTEROIDS Jeffrey R. Stuart(1) and Kathleen C. Howell(2) (1)Graduate Student, Purdue University, School of Aeronautics and Astronautics, 701 W. Stadium Ave., West Lafayette, IN, 47907, 765-620-4342, [email protected] (2)Hsu Lo Professor of Aeronautical and Astronautical Engineering, Purdue University, School of Aeronautics and Astronautics, 701 W. Stadium Ave., West Lafayette, IN, 47907, 765-494-5786, [email protected] Abstract: The Sun-Jupiter Trojan asteroid swarms are targets of interest for robotic spacecraft missions, and because of the relatively stable dynamics of the equilateral libration points, low-thrust propulsion systems offer a viable method for realizing tours of these asteroids. This investigation presents a novel scheme for the automated creation of prospective tours under the natural dynamics of the circular restricted three-body problem with thrust provided by a variable specific impulse low-thrust engine. The procedure approximates tours by combining independently generated fuel- optimal rendezvous arcs between pairs of asteroids into a series of coast periods near asteroids and engine operation durations between the asteroids. Propellant costs and departure and arrival times are estimated from performance of the individual thrust arcs. Tours of interest are readily re-converged in higher fidelity ephemeris models. In general, the automation procedure rapidly generates a large number of potential tours and supplies -

The Nordtvedt Effect in the Trojan Asteroids
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by CERN Document Server (will be inserted by hand later) AND Your thesaurus codes are: ASTROPHYSICS 10(01.03.1; 01.05.1; 03.02.1; 07.37.1; 18.10.1) 5.7.2002 The Nordtvedt effect in the Trojan asteroids 1; 2; R.B. ORELLANA ∗ and H. VUCETICH ∗ 1 Observatorio Astron´omico de La Plata, Paseo del Bosque, (1900)La Plata, Argentina 2 Departamento de F´isica, Universidad Nacional de La PLata, C.C. 67, (1900)La Plata, Argentina Received October 5, accepted December 15, 1992 Abstract. Bounds to the Nordtvedt parameter are obtained from the motion of the first twelve Trojan asteroids in the period 1906-1990. From the analysis performed, we derive a value for the inverse of the Saturn mass 3497.80 0.81 and the Nordtvedt parameter ± -0.56 0.48, from a simultaneous solution for all asteroids. ± Key words: relativity - gravitation - asteroids - astronomical constants - celestial me- chanics 1. Introduction The asteroids located in the vicinity of the equilateral triangle solutions of Lagrange (L4 and L5), known as the Trojan asteroids, are particularly sensitive to a possible viola- tion of the Principle of Equivalence (Nordtvedt, 1968) because they act as a resonator selecting long period perturbations. Theories of gravitation alternatives to General Rel- ativity predict a difference between inertial (mi ) and passive gravitational (mg ) masses of a planetary-sized body (the so-called Nordtvedt effect) equal to: m g =1+∆; (1) mi For the sun, the correction term ∆ is equal to: 15GM ∆ = η, (2) 2R c2 ?Member of C.O.N.I.C.E.T. -

Colours of Minor Bodies in the Outer Solar System II - a Statistical Analysis, Revisited
Astronomy & Astrophysics manuscript no. MBOSS2 c ESO 2012 April 26, 2012 Colours of Minor Bodies in the Outer Solar System II - A Statistical Analysis, Revisited O. R. Hainaut1, H. Boehnhardt2, and S. Protopapa3 1 European Southern Observatory (ESO), Karl Schwarzschild Straße, 85 748 Garching bei M¨unchen, Germany e-mail: [email protected] 2 Max-Planck-Institut f¨ur Sonnensystemforschung, Max-Planck Straße 2, 37 191 Katlenburg- Lindau, Germany 3 Department of Astronomy, University of Maryland, College Park, MD 20 742-2421, USA Received —; accepted — ABSTRACT We present an update of the visible and near-infrared colour database of Minor Bodies in the outer Solar System (MBOSSes), now including over 2000 measurement epochs of 555 objects, extracted from 100 articles. The list is fairly complete as of December 2011. The database is now large enough that dataset with a high dispersion can be safely identified and rejected from the analysis. The method used is safe for individual outliers. Most of the rejected papers were from the early days of MBOSS photometry. The individual measurements were combined so not to include possible rotational artefacts. The spectral gradient over the visible range is derived from the colours, as well as the R absolute magnitude M(1, 1). The average colours, absolute magnitude, spectral gradient are listed for each object, as well as their physico-dynamical classes using a classification adapted from Gladman et al., 2008. Colour-colour diagrams, histograms and various other plots are presented to illustrate and in- vestigate class characteristics and trends with other parameters, whose significance are evaluated using standard statistical tests. -
The Minor Planet Bulletin
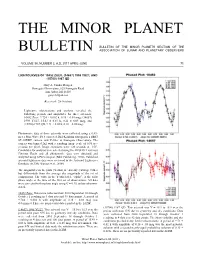
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 38, NUMBER 2, A.D. 2011 APRIL-JUNE 71. LIGHTCURVES OF 10452 ZUEV, (14657) 1998 YU27, AND (15700) 1987 QD Gary A. Vander Haagen Stonegate Observatory, 825 Stonegate Road Ann Arbor, MI 48103 [email protected] (Received: 28 October) Lightcurve observations and analysis revealed the following periods and amplitudes for three asteroids: 10452 Zuev, 9.724 ± 0.002 h, 0.38 ± 0.03 mag; (14657) 1998 YU27, 15.43 ± 0.03 h, 0.21 ± 0.05 mag; and (15700) 1987 QD, 9.71 ± 0.02 h, 0.16 ± 0.05 mag. Photometric data of three asteroids were collected using a 0.43- meter PlaneWave f/6.8 corrected Dall-Kirkham astrograph, a SBIG ST-10XME camera, and V-filter at Stonegate Observatory. The camera was binned 2x2 with a resulting image scale of 0.95 arc- seconds per pixel. Image exposures were 120 seconds at –15C. Candidates for analysis were selected using the MPO2011 Asteroid Viewing Guide and all photometric data were obtained and analyzed using MPO Canopus (Bdw Publishing, 2010). Published asteroid lightcurve data were reviewed in the Asteroid Lightcurve Database (LCDB; Warner et al., 2009). The magnitudes in the plots (Y-axis) are not sky (catalog) values but differentials from the average sky magnitude of the set of comparisons. The value in the Y-axis label, “alpha”, is the solar phase angle at the time of the first set of observations. All data were corrected to this phase angle using G = 0.15, unless otherwise stated.