Review of Vibration Control Methods for Wind Turbines
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wind Turbine Power Curves Based on the Weibull Cumulative Distribution Function
applied sciences Article Wind Turbine Power Curves Based on the Weibull Cumulative Distribution Function Neeraj Bokde1,*,† , Andrés Feijóo 2,*,† and Daniel Villanueva 2,† 1 Department of Electronics and Communication Engineering, Visvesvaraya National Institute of Technology, Nagpur 440010, India 2 Departamento de Enxeñería Eléctrica-Universidade de Vigo, Campus de Lagoas-Marcosende, 36310 Vigo, Spain; [email protected] * Correspondence: [email protected] (N.B.); [email protected] (A.F.); Tel.: +91-90-2841-5974 (N.B.) † These authors contributed equally to this work. Received: 6 September 2018; Accepted: 26 September 2018; Published: 28 September 2018 Abstract: The representation of a wind turbine power curve by means of the cumulative distribution function of a Weibull distribution is investigated in this paper, after having observed the similarity between such a function and real WT power curves. The behavior of wind speed is generally accepted to be described by means of Weibull distributions, and this fact allows researchers to know the frequency of the different wind speeds. However, the proposal of this work consists of using these functions in a different way. The goal is to use Weibull functions for representing wind speed against wind power, and due to this, it must be clear that the interpretation is quite different. This way, the resulting functions cannot be considered as Weibull distributions, but only as Weibull functions used for the modeling of WT power curves. A comparison with simulations carried out by assuming logistic functions as power curves is presented. The reason for using logistic functions for this validation is that they are very good approximations, while the reasons for proposing the use of Weibull functions are that they are continuous, simpler than logistic functions and offer similar results. -
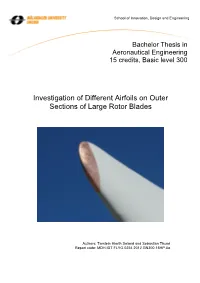
Investigation of Different Airfoils on Outer Sections of Large Rotor Blades
School of Innovation, Design and Engineering Bachelor Thesis in Aeronautical Engineering 15 credits, Basic level 300 Investigation of Different Airfoils on Outer Sections of Large Rotor Blades Authors: Torstein Hiorth Soland and Sebastian Thuné Report code: MDH.IDT.FLYG.0254.2012.GN300.15HP.Ae Sammanfattning Vindkraft står för ca 3 % av jordens produktion av elektricitet. I jakten på grönare kraft, så ligger mycket av uppmärksamheten på att få mer elektricitet från vindens kinetiska energi med hjälp av vindturbiner. Vindturbiner har använts för elektricitetsproduktion sedan 1887 och sedan dess så har turbinerna blivit signifikant större och med högre verkningsgrad. Driftsförhållandena förändras avsevärt över en rotors längd. Inre delen är oftast utsatt för mer komplexa driftsförhållanden än den yttre delen. Den yttre delen har emellertid mycket större inverkan på kraft och lastalstring. Här är efterfrågan på god aerodynamisk prestanda mycket stor. Vingprofiler för mitten/yttersektionen har undersökts för att passa till en 7.0 MW rotor med diametern 165 meter. Kriterier för bladprestanda ställdes upp och sensitivitetsanalys gjordes. Med hjälp av programmen XFLR5 (XFoil) och Qblade så sattes ett blad ihop av varierande vingprofiler som sedan testades med bladelement momentum teorin. Huvuduppgiften var att göra en simulering av rotorn med en aero-elastisk kod som gav information beträffande driftsbelastningar på rotorbladet för olika vingprofiler. Dessa resultat validerades i ett professionellt program för aeroelasticitet (Flex5) som simulerar steady state, turbulent och wind shear. De bästa vingprofilerna från denna rapportens profilkatalog är NACA 63-6XX och NACA 64-6XX. Genom att implementera dessa vingprofiler på blad design 2 och 3 så erhölls en mycket hög prestanda jämfört med stora kommersiella HAWT rotorer. -
Turbine Directory
Turbine Directory Wind turbines are the one component that wind farms Ten turbine manufacturers were selected for this simply cannot do without. More than 100 wind turbine directory, based on U.S. wind energy capacity installed manufacturers exist globally, offering as many 1,000 during 2012* (Source: AWEA U.S. Wind Industry An- turbine models. No single turbine is the right fit for nual Market Report Year End 2012). Technical spec- every application. ifications were taken from manufacturers’ literature In the following pages, Wind Systems has compiled or otherwise provided by the manufacturers. Readers news, turbine models, and general specifications from should contact the turbine manufacturer directly for common utility-scale wind turbine manufacturers, in its complete specifications. inaugural Turbine Directory. * Companies with top-ten 2012 market share that have ceased manufacture of new wind turbines were not included in this directory. windsystemsmag.com 21 inFOCUS: Turbine Directory GE Energy General Electric’s onshore wind turbine portfolio consists of five models ranging from 1.7 to 3.2 MW, with various configurations to meet project requirements. GE is the top wind turbine manufacturer in the U.S., with 3,003 turbines (5,014 MW) installed during 2012, accounting for a 38.2 percent market share. GE turbines account for more than 24 GW of installed wind power capacity in the U.S. GE’s 2.5-120 turbine now operating commercially at German site Two months after the commercial operation in 8,000-megawatt hours a of the “Energiewende” on a completion of installation, Schnaittenbach, a town in year, which is equivalent regional level. -

Description of an 8 MW Reference Wind Turbine
Journal of Physics: Conference Series PAPER • OPEN ACCESS Recent citations Description of an 8 MW reference wind turbine - Cyclic flexural test and loading protocol for steel wind turbine tower columns To cite this article: Cian Desmond et al 2016 J. Phys.: Conf. Ser. 753 092013 Chung-Che Chou et al - Techno-economic system analysis of an offshore energy hub with an outlook on electrofuel applications Christian Thommessen et al View the article online for updates and enhancements. - Evaluating wind turbine power coefficient—An undergraduate experiment Edward W. K. Chan et al This content was downloaded from IP address 170.106.40.139 on 26/09/2021 at 05:57 The Science of Making Torque from Wind (TORQUE 2016) IOP Publishing Journal of Physics: Conference Series 753 (2016) 092013 doi:10.1088/1742-6596/753/9/092013 Description of an 8 MW reference wind turbine Cian Desmond1, Jimmy Murphy1, Lindert Blonk2 and Wouter Haans2 1 MaREI, University College Cork, Ireland 2 DNV-GL, Turbine Engineering, Netherlands. E-mail: [email protected] Abstract. An 8 MW wind turbine is described in terms of mass distribution, dimensions, power curve, thrust curve, maximum design load and tower configuration. This turbine has been described as part of the EU FP7 project LEANWIND in order to facilitate research into logistics and naval architecture efficiencies for future offshore wind installations. The design of this 8 MW reference wind turbine has been checked and validated by the design consultancy DNV-GL. This turbine description is intended to bridge the gap between the NREL 5 MW and DTU 10 MW reference turbines and thus contribute to the standardisation of research and development activities in the offshore wind energy industry. -

Offshore Wind Energy Resource Assessment Across the Territory of Oman: a Spatial-Temporal Data Analysis
sustainability Article Offshore Wind Energy Resource Assessment across the Territory of Oman: A Spatial-Temporal Data Analysis Amer Al-Hinai 1,2,* , Yassine Charabi 3 and Seyed H. Aghay Kaboli 1,3 1 Sustainable Energy Research Center, Sultan Qaboos University, 123 Muscat, Oman; [email protected] 2 Department of Electrical & Computer Engineering, College of Engineering, Sultan Qaboos University, 123 Muscat, Oman 3 Center for Environmental Studies and Research, Sultan Qaboos University, 123 Muscat, Oman; [email protected] * Correspondence: [email protected] Abstract: Despite the long shoreline of Oman, the wind energy industry is still confined to onshore due to the lack of knowledge about offshore wind potential. A spatial-temporal wind data analysis is performed in this research to find the locations in Oman’s territorial seas with the highest potential for offshore wind energy. Thus, wind data are statistically analyzed for assessing wind characteristics. Statistical analysis of wind data include the wind power density, and Weibull scale and shape factors. In addition, there is an estimation of the possible energy production and capacity factor by three commercial offshore wind turbines suitable for 80 up to a 110 m hub height. The findings show that offshore wind turbines can produce at least 1.34 times more energy than land-based and nearshore wind turbines. Additionally, offshore wind turbines generate more power in the Omani peak electricity demand during the summer. Thus, offshore wind turbines have great advantages over land-based wind turbines in Oman. Overall, this work provides guidance on the deployment Citation: Al-Hinai, A.; Charabi, Y.; and production of offshore wind energy in Oman. -
LCOE Reduction for the Next Generation Offshore Wind Turbines
LCOE reduction for the next generation offshore wind turbines OUTCOMES FROM THE INNWIND.EU PROJECT October 2017 Funded by the European Co-fundedCommunity’s by theSeventh Intelligent Energy Europe ProgrammeFramework ofProgramme the European Union LCOE reduction for the next generation offshore wind turbines OUTCOMES FROM THE INNWIND.EU PROJECT October 2017 www.innwind.eu PRINCIPAL AUTHORS: Peter Hjuler Jensen (DTU) Takis Chaviaropoulos (NTUA) Anand Natarajan (DTU) AUTHORS (PROJECT PARTNERS): Flemming Rasmussen (DTU) Helge Aagaard Madsen (DTU) Peter Jamieson (Univ. of Strathclyde) Jan-Willem Van Wingerden (TU Delft) Vasilis Riziotis (NTUA) Athanasios Barlas (DTU) Henk Polinder (TU Delft) Asger Bech Abrahamsen (DTU) David Powell (Magnomatics) Gerrit Jan Van Zinderen (DNV GL) Daniel Kaufer (Rambøll) Rasoul Shirzadeh (Univ. of Oldenburg) Jose Azcona Armendariz (CENER) Spyros Voutsinas (NTUA) Andreas Manjock (DNV GL) Uwe Schmidt Paulsen (DTU) James Dobbin (DNV GL) Sabina Potestio (WindEurope) PROJECT COORDINATION: Peter Hjuler Jensen (DTU) PUBLICATION COORDINATION: Sabina Potestio (WindEurope) ACKNOWLEDGEMENTS: Ervin Bossanyi (DNV GL), Kais Atallah (Univ. of Sheffield), Paul Weaver (Univ. of Bristol), Arno Van Wingerde (Fraunhofer IWES), Martin Kuhn (University of Oldenburg), Stoyan Kanev (ECN), Bernard Bulder (ECN), Detlev Heinemann (Univ. of Oldenburg), John Dalsgaard Sørensen (AAU), Zhe Chen (AAU), Po Wen Cheng (Univ. of Stuttgart), Frank Lemmer (Univ. of Stuttgart), Ole Petersen (DHI), Ben Hendriks (WMC), Kimon Argyriadis (DNV GL), Raimund Rolfes (Univ. of Hannover), Dimitris Saravanos (Univ. Patras), Andreas Makris (CRES), Niklas Magnusson (SINTEF), William Leithead (Univ. of Strathclyde), Carlos Pizarro De La Fuente (Gamesa), Arwyn Thomas and Per H. Lauritsen (Siemens), Harald Bersee (SE Blades), Carlo Bottasso (Politecnico di Milano), Alessandro Croce (Politecnico di Milano), Jason Jonkman (NREL), Antonio Ugarte (CENER), Paul Todd (Magnomatics). -

Offshore Wind in Europe Key Trends and Statistics 2019
Subtittle if needed. If not MONTH 2018 Published in Month 2018 Offshore Wind in Europe Key trends and statistics 2019 Offshore Wind in Europe Key trends and statistics 2019 Published in February 2020 windeurope.org This report summarises construction and financing activity in European offshore wind farms from 1 January to 31 December 2019. WindEurope regularly surveys the industry to determine the level of installations of foundations and turbines, and the subsequent dispatch of first power to the grid. The data includes demonstration sites and factors in decommissioning where it has occurred. Annual installations are expressed in gross figures while cumulative capacity represents net installations per site and country. Rounding of figures is at the discretion of the author. DISCLAIMER This publication contains information collected on a regular basis throughout the year and then verified with relevant members of the industry ahead of publication. Neither WindEurope nor its members, nor their related entities are, by means of this publication, rendering professional advice or services. Neither WindEurope nor its members shall be responsible for any loss whatsoever sustained by any person who relies on this publication. TEXT AND ANALYSIS: Lizet Ramírez, WindEurope Daniel Fraile, WindEurope Guy Brindley, WindEurope EDITOR: Colin Walsh, WindEurope DESIGN: Lin Van de Velde, Drukvorm FINANCE DATA: Clean Energy Pipeline and IJ Global All currency conversions made at EUR/ GBP 0.8777 and EUR/USD 1.1117 Figures include estimates for undisclosed values PHOTO COVER: Courtesy of Deutsche Bucht and MHI Vestas MORE INFORMATION: [email protected] +32 2 213 11 68 EXECUTIVE SUMMARY ..................................................................................................... 7 1. OFFSHORE WIND INSTALLATIONS ........................................................................... -

Horns Rev 3 Update NR 1
The project team behind Horns Rev 3 Horns Rev 3 Update NR 1 Denmark’s largest offshore The team behind Horns Rev 3 met for the first time at a start-up meeting in Kolding in December 2016 and again at a team event in June 2017. The meetings were primarily of a professional nature, but there was also ample opportunity to get to know each other socially. wind farm Nearly 50 employees in five countries are involved in in order to get to know each other. Horns Rev 3 well on its way the establishment of Horns Rev 3 and are working Who does what at Horns Rev 3 together closely to ensure the success of the pro- “Communication is the be-all and end-all. Timetable for construction ject. The majority (28) are based in Kolding, whilst It isn’t enough to be good at designing foundations. Meet the team behind Horns Rev 3 the remainder are distributed between Vattenfall’s You also need to be able to communicate the different offices in Hamburg (8), London (4), Esbjerg (4), interfaces to your other colleagues. As a result, our Stockholm (2), Berlin (1) and Amsterdam (1). workshops have combined strong technical content with a really good chance to socialise,” The employees have got together at two work- shops/events in Kolding held at six-month intervals says project director Jens Hansen. 2013 – 2014: 2015 – 2016: 2017 – 2018: 2018 – 2020: The Danish Energy Agen- Vattenfall Wind Power Scour protection – a Installation of wind cy drafts an Environmen- is granted the conces- protective layer of stones turbine towers, engine tal Impact Assessment sion on Horns Rev 3. -

Wind Energy Barometer 2020
1 2 Installation of a lift on a wind turbine on the Harfleur 426 TWh enterprise zone. The estimated electricity production from wind power in the EU of 28 in 2019 wind energy barometer wind energy barometer WIND ENERGY BAROMETER A study carried out by EurObserv’ER. was a good year for the global wind market, which expanded 2019 in its three main zones, namely China, the United States and Europe. Given that the UK was still a Member State in 2019, the European Union’s additional capacity was upwards of 12 GW compared to just below 11 GW in 2018. The European Union of 27 (minus the UK) added about 10 GW of capacity in 2019, taking its installed base to 167.6 GW, compared to just over 8.7 GW in 2018. 191.5 GW 12.2 GW Cumulative wind power capacity installed Wind power capacity installed EDF in the EU of 28 at the end of 2019 in the EU of 28 during 2019 WIND ENERGY BAROMETER – EUROBSERV’ER – MARCH 2020 WIND ENERGY BAROMETER – EUROBSERV’ER – MARCH 2020 3 4 that this decision should encourage deve- by producers and major electricity consu- News from arouNd lopers to install as many wind turbine mers, enabling the former to guarantee Tabl. n° 1 the maiN markets sites as possible during 2020, with expec- the profitability of their power plants by Wind power capacity installed* in the European Union at the end of 2019 (MW) ted additional capacity put at about ensuring that the output is sold at a pre- Global installed wind capacity grew signi- 28 GW. -
Download Your Data Sets Freely Can Make the Decision Basis More Effective
Giving Wind Direction SYSTEMS IN FOCUS Blades & Gearboxes Repowering THE WINDS OF CHANGE PROFILE Uptake OCTOBER 2018 windsystemsmag.com [email protected] 888.502.WORX torkworx.com OH BABY! We have cut the cord on RAD Extreme Torque Machines. FAST, SIMPLE, EASY! Call us for your free demo today! • Range from 250 to 3000 ft/lbs • Torque and angle feature • Automatic 2-speed gearbox • Programmable preset torque settings • Latest Li-ion 18V battery • High accuracy +/- 5% The Power Behind the Power You bring us your toughest challenges. We bring you unrivaled technical support. Superior engineering. Manufacturing expertise. Power on with innovations developed from the inside out. timken.com/wind-energy CONTENTS 12 PROFILE IN FOCUS Uptake applies data science and machine learning to data and transforms it into insights designed to increase wind- THE WINDS energy production. 28 OF CHANGE Assessing the profitability of a repowering project MAIN SHAFT BEARING LUBRICATION Main shaft bearings are a critical component in the driveline of a wind turbine, and selection of the right lubricating grease is essential in the prevention of premature bearing damage. 18 THE RISE IN CAPACITY FACTOR CONVERSATION Larger blades optimized for low-wind class siting Liz Burdock, CEO and President of Business Network for Offshore, support the trend of driving up turbine capacity discusses some of the challenges faced factor. 24 by U.S. offshore wind. 32 2 OCTOBER 2018 COVER PHOTO: CODY TELFORD, CAMPBELL SCIENTIFIC CASTROL OPTIGEAR SYNTHETIC CT 320 THE LONGEST TRACK RECORD, LONGEST OIL LIFE AND LONGEST GUARANTEE. • Castrol has over 30 years of experience and knowledge in the wind industry. -

A Local Perspective on Wind Energy Potential in Six Reference Sites on the Western Coast of the Black Sea Considering Five Different Types of Wind Turbines
inventions Article A Local Perspective on Wind Energy Potential in Six Reference Sites on the Western Coast of the Black Sea Considering Five Different Types of Wind Turbines Alexandra Ionelia Diaconita *, Liliana Rusu and Gabriel Andrei Department of Mechanical Engineering, Faculty of Engineering, “Dunarea de Jos” University of Galati, 47 Domneasca Street, 800008 Galati, Romania; [email protected] (L.R.); [email protected] (G.A.) * Correspondence: [email protected] Abstract: This paper aims to evaluate the energy potential of six sites located in the Black Sea, all of them near the Romanian shore. To conduct this study, a climate scenario was chosen which considers that the emissions of carbon dioxide will increase until 2040 when they reach a peak, decreasing afterward. This scenario is also known as RCP 4.5. The wind dynamics is considered for two periods of time. The first is for the near future with a duration of 30 years from 2021 to 2050, the second period is for the far-distant future with a span of 30 years from 2071 to 2100. In this study, parameters such as minimum, maximum, mean wind speed, interpolated at 90 m height were analyzed to create an overview of the wind quality in these areas, followed by an analysis of the power density parameters such as seasonal and monthly wind power. In the end, the annual electricity production and capacity factor were analyzed using five high-power wind turbines, ranging from 6 to 9.5 MW. For the purpose of this paper, the data on the wind speed at 10 m height in the RCP 4.5 scenario was Citation: Diaconita, A.I.; Rusu, L.; obtained from the database provided by the Swedish Meteorology and Hydrology Institute (SMHI). -

Wind Turbineswind Turbine Technology Vestas Wind Systems A/S Denmark
Research Acvi*es in Wind Power Professor Remus Teodorescu Aalborg University Energy Department [email protected] www.et.aau.dk December 10, 2012 Aalborg University Founded in 1974 December 10, 2012 2 Organisaon December 10, 2012 3 • Power Electronics for Wind Power • Grid Supports with Wind Power Plant • Storage System for Grid Support • Grid Integraon of PV December 10, 2012 4 Wind Energy Systems • Record installaon of 41.7 GW (6% increase from 2010) in spite of the financial/economic crisis. • The biggest annual markets in 2011 were China – 17.6 GW, Europe – 10.2 GW,followed by USA – 6.7 GW • The cumulave worldwide installed wind power by end of 2011 was 241 GW • The biggest cumulave market was Europe – 87.5 GW (43.7%) followed by Asia 85.3 GW and USA – 40.2 GW (20.1%) • Offshore installaons mainly in Europe was 470 MW (67.5% reduc*on from 2010). • The average growth rate for 2012-2016 is 10%. In 2016 510.9 GW cumulave installaon • The worldwide accumulated installed power forecasted by 2021 is roughly 1 TW, leading to a global wind power penetraon of 8% Power Electronics for Renewable Energy 5 11-Dec-12 Systems Course, Aalborg University Wind Energy Systems Wind Turbine development • Vestas is nr. 1 with 12.9% (1.4% drop from 2010) • Four chinese manufacturers are in Top 10 • Danish Vestas and Siemens Wind stand for over 20% of the worldwide market • 2 - 3MW WT are s*ll the "best seller" on the market! • Averaged size on-shore in 2011 is 1.67 MW and off-shore 3.7 MW • 3 - 7 MW WT are used for off-shore farms, ex.