Marcus Ljung Och Per Turner Examensarbete V2013
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Imagine. Create. Deploy. Inspired? So Are We
Imagine. Create. Deploy. Inspired? So Are We. Inspiration is all around us. From beautiful screens on the web to well-designed reports. New devices push the development envelope and ask that we consider new technologies. The latest release, DevExpress 12.2, delivers the tools you need to build the multi-channel solutions you can imagine: Windows 8-inspired applications with live tiles perfect for Microsoft Surface, multi-screen iOS and Android apps. It’s all possible. Let’s see what develops. Download your 30-day trial at www.DevExpress.com Copyright 1998-2013 Developer Express, Inc. All rights reserved. All trademarks are property of their respective owners. Untitled-9 1 1/8/13 2:10 PM THE MICROSOFT JOURNAL FOR DEVELOPERS MARCH 2013 VOL 28 NO 3 magazine XAML with DirectX and C++..............34 Using XAML with DirectX and C++ COLUMNS in Windows Store Apps WINDOWS WITH C++ Doug Erickson .................................................................34 Rendering in a Desktop Application with Direct2D Exploring the JavaScript API for Offi ce: Kenny Kerr, page 8 Data Access and Events DATA POINTS Stephen Oliver and Eric Schmidt ........................................48 Playing with the EF6 Alpha Julie Lerman, page 16 Best Practices in Asynchronous Programming WINDOWS AZURE INSIDER Stephen Cleary ................................................................56 Real-World Scenarios for Node.js in Windows Azure Migrating ASP.NET Web Forms to the Bruno Terkaly and Ricardo Villalobos, page 26 MVC Pattern with the ASP.NET Web API THE WORKING -

Wxshapeframework: an Easy Way for Diagrams Manipulation in C++ Applications
WSEAS TRANSACTIONS on COMPUTERS Michal Bliznak, Tomas Dulik, Vladimir Vasek WXSHAPEFRAMEWORK: AN EASY WAY FOR DIAGRAMS MANIPULATION IN C++ APPLICATIONS MICHAL BLIŽŇÁK1, TOMÁŠ DULÍK2, VLADIMÍR VAŠEK3 Department of Informatics and Artificial Inteligence1, 2, Department of Automation and Control Engineering3 Faculty of Applied Informatics, Tomas Bata University Nad Stráněmi 4511, 760 05, Zlín CZECH REPUBLIC [email protected], [email protected], [email protected] Abstract: wxShapeFramework is new cross-platform software library written in C++ programming language which is suitable for creation of software applications manipulating diagrams, images and other graphical objects. Thanks to the underlying technologies such as wxWidgets toolkit and its XML-based persistent data container add-on called wxXmlSerializer it is an ideal solution for rapid and easy cross-platform visualisation software development. The paper reveals how the wxSF allows user to easily create applications able to interactively handle various scenes consisting of pre-defined or user-defined graphic objects (both vector- and bitmap-based) or GUI controls, store them to XML files, export them to bitmap images, print them etc. Moreover, thanks to applied software licence the library can be used for both open-source and commercial projects on all main target platforms including MS Windows, MacOS and Linux. Keywords: Diagram, vector, bitmap, GUI, wxWidgets, wxXmlSerializer, wxShapeFramework, wxSF, C++ 1 Introduction called shapes (including basic rectangular and elliptic shapes, line and curve shapes, polygonal shapes, static Modern software applications often need the ability to and in-place editable text, bitmap images, etc.). graphically represent various data or logical structures, information flows, processes and similar The wxSF allows to define relationship between abstract information types in the form of diagrams. -
PHP Beyond the Web Shell Scripts, Desktop Software, System Daemons and More
PHP Beyond the web Shell scripts, desktop software, system daemons and more Rob Aley This book is for sale at http://leanpub.com/php This version was published on 2013-11-25 This is a Leanpub book. Leanpub empowers authors and publishers with the Lean Publishing process. Lean Publishing is the act of publishing an in-progress ebook using lightweight tools and many iterations to get reader feedback, pivot until you have the right book and build traction once you do. ©2012 - 2013 Rob Aley Tweet This Book! Please help Rob Aley by spreading the word about this book on Twitter! The suggested hashtag for this book is #phpbeyondtheweb. Find out what other people are saying about the book by clicking on this link to search for this hashtag on Twitter: https://twitter.com/search?q=#phpbeyondtheweb Contents Welcome ............................................ i About the author ...................................... i Acknowledgements ..................................... ii 1 Introduction ........................................ 1 1.1 “Use PHP? We’re not building a website, you know!”. ............... 1 1.2 Are you new to PHP? ................................. 2 1.3 Reader prerequisites. Or, what this book isn’t .................... 3 1.4 An important note for Windows and Mac users ................... 3 1.5 About the sample code ................................ 4 1.6 External resources ................................... 4 1.7 Book formats/versions available, and access to updates ............... 5 1.8 English. The Real English. .............................. 5 2 Getting away from the Web - the basics ......................... 6 2.1 PHP without a web server .............................. 6 2.2 PHP versions - what’s yours? ............................. 7 2.3 A few good reasons NOT to do it in PHP ...................... 8 2.4 Thinking about security ............................... -

Imagine. Create. Deploy. Inspired? So Are We
Imagine. Create. Deploy. Inspired? So Are We. Inspiration is all around us. From beautiful screens on the web to well-designed reports. New devices push the development envelope and ask that we consider new technologies. The latest release, DevExpress 12.2, delivers the tools you need to build the multi-channel solutions you can imagine: Windows 8-inspired applications with live tiles perfect for Microsoft Surface, multi-screen iOS and Android apps. It’s all possible. Let’s see what develops. Download your 30-day trial at www.DevExpress.com Copyright 1998-2013 Developer Express, Inc. All rights reserved. All trademarks are property of their respective owners. Untitled-9 1 1/8/13 2:10 PM THE MICROSOFT JOURNAL FOR DEVELOPERS FEBRUARY 2013 VOL 28 NO 2 magazine JavaScript API for Offi ce.........................20 Exploring the New JavaScript API for Offi ce COLUMNS Stephen Oliver and Eric Schmidt ........................................20 CUTTING EDGE Essential Facebook Async Causality Chain Tracking Programming: Andrew Stasyuk ...............................................................32 The JavaScript SDK Dino Esposito, page 6 Building a Simple Comet Application WINDOWS WITH C++ in the Microsoft .NET Framework Creating Desktop Apps Derrick Lau .....................................................................42 with Visual C++ 2012 Kenny Kerr, page 12 Detecting Abnormal Data Using TEST RUN k-Means Clustering Naive Bayes Classifi cation with C# ............................................................. James McCaffrey 54 James McCaffrey, -
Advanced Wxpython Nuts and Bolts Robin Dunn O'reilly Open
Advanced wxPython Nuts and Bolts Robin Dunn Software Craftsman O’Reilly Open Source Convention July 21–25, 2008 Slides available at http://wxPython.org/OSCON2008/ wxPython: Cross Platform GUI Toolkit 1 Presentation Overview • Introduction • Widget Inspection Tool • wx.ListCtrl • Keeping the UI Updated • Virtual wx.ListCtrl • Sizers and more sizers • wx.TreeCtrl • XML based resource system • wx.gizmos.TreeListCtrl • Data transfer • CustomTreeCtrl – data objects • wx.grid.Grid – clipboard • ScrolledPanel – drag and drop • wx.HtmlWindow • Creating custom widgets • Double buffered drawing wxPython: Cross Platform GUI Toolkit 2 Introduction to wxPython • wxPython is a GUI toolkit for Python, built upon the wxWidgets C++ toolkit. (See http://wxWidgets.org/) – Cross platform: Windows, Linux, Unix, OS X. – Uses native widgets/controls, plus many platform independent widgets. • Mature, well established projects. – wxWidgets: 1992 – wxPython: 1996 wxPython: Cross Platform GUI Toolkit 3 Introduction: architecture wxPython Library Proxy classes wxPython Extension Modules wxWidgets Toolkit Platform GUI Operating System wxPython: Cross Platform GUI Toolkit 4 Introduction: partial class hierarchy wx.Object wx.EvtHandler wx.Window wx.TopLevelWindow wx.Panel wx.Control wx.Frame wx.Dialog wx.ScrolledWindow wxPython: Cross Platform GUI Toolkit 5 wx.ListCtrl • Presents a list of items with one of several possible views – List – Report – Icon • Supports various attributes and operations on the list data – Icons, and colors – Sorting – multiple selection • -

(DNC) Magazine
EDITOR’S NOTE @suprotimagarwal Editor in Chief Developers! Developers! Developers! A decade ago, bathed in sweat, Editor In Chief : yelled the one and only Steve Balmer as if he was addressing a sect Suprotim Agarwal that's unlike any other. (suprotimagarwal@ dotnetcurry.com) But why am I bringing this up now? Art Director : Minal Agarwal In the Software ecosystem, change has always been disruptive and has occured more frequently than ever. Contributing Authors : Yacoub Massad Organizations have had the best of intentions while adapting to these Gouri Sohoni frequent changes and have often pondered seriously accelerating their Darren Gillis Daniel Jimenez Garcia digital transformation journey. The actual transformation though has Damir Arh been quite slow due to restraints like time and budget. Benjamin Jakobus That is, until now. Technical Reviewers : Damir Arh The pandemic that began in 2020 forced companies to reformulate Daniel Jimenez Garcia their plans and pivot by setting up remote working environments. Years’ Gouri Sohoni Subodh Sohoni worth of digital transformation, happened in just a matter of months! Suprotim Agarwal And at the center of this were the Developers and IT staff, playing Yacoub Massad a crucial role in this transformation. Sitting in remote locations, and dealing with unprecedented challenges, developers have been working Next Edition : asynchronously to skill, reskill and upskill themselves, and make their April 2021 organizations more agile. Windows, Visual Studio, ASP.NET, Azure, TFS & other Microsoft products & technologies are trademarks of Nobody knows for sure what 2021 and the coming years has in store the Microsoft group of companies. for us. I sincerelly hope it's good for everyone. -
Up & Running with Wxpython Robin Dunn Patrick O'brien O'reill
wxPython in a Nutshell Robin Dunn http://wxPython.org/ O’Reilly Open Source Convention July 26–30, 2004 wxPython: Cross Platform GUI Toolkit 1 The best way to eat an elephant… wxPython: Cross Platform GUI Toolkit 2 …is one bite at a time wxPython: Cross Platform GUI Toolkit 3 Introduction to wxPython • wxPython is a GUI toolkit for Python, built upon the wxWidgets C++ toolkit. – Cross platform: Windows, Linux, Unix, OS X. – Uses native widgets/controls, plus many platform independent widgets. • Mature, well established projects. – wxWidgets: 1992 – wxPython: 1996 wxPython: Cross Platform GUI Toolkit 4 Introduction: architecture wxPython Library Proxy classes wxPython Extension Modules wxWidgets Toolkit Platform GUI Operating System wxPython: Cross Platform GUI Toolkit 5 Introduction: partial class hierarchy wx.Object wx.EvtHandler wx.Window wx.TopLevelWindow wx.Panel wx.Control wx.Frame wx.Dialog wx.ScrolledWindow wxPython: Cross Platform GUI Toolkit 6 Getting started with wxPython • Installation is simple -- binary installers are available at SourceForge and via http://wxPython.org/download.php for: – Windows: *.exe – Linux: *.rpm (and *.deb’s are available separately.) – OS X: *.dmg, a disk image that contains an Installer package. • Can be built from source for other Unix-like systems. wxPython: Cross Platform GUI Toolkit 7 Getting started with wxPython • Choose an installer. • Which version of Python do you use? – 2.2, or 2.3 • Unicode? – Windows, but be careful with Win9x/ME – Linux/Unix, with the GTK2 build – OS X, soon • or ANSI? – All platforms wxPython: Cross Platform GUI Toolkit 8 Getting started with wxPython • Choose an editor or development environment: – Boa Constructor – WingIDE – PyAlaMode – SCiTE – Emacs, vi, etc. -
Linux, Yocto and Fpgas
Embedded Open Source Experts Linux, Yocto and FPGAs Integrating Linux and Yocto builds into different SoCs From a Linux software perspective: ➤ Increased demand for Linux on FPGAs ➤ Many things to mange, both technical and practical ➤ FPGAs with integrated CPU cores – very similar many other SoCs Here are some experiences and observations... © Codiax 2019 ● Page 2 Why use Linux? ➤ De-facto standard ➤ Huge HW support ➤ FOSS ➤ Flexible ➤ Adaptable ➤ Stable ➤ Scalable ➤ Royalty free ➤ Vendor independent ➤ Large community ➤ Long lifetime Why not Linux? ➤ Too big ➤ Real-time requirements ➤ Certification ➤ Boot time ➤ Licensing ➤ Too open? Desktop Shells: Desktop Display server: Display BrailleDisplay Touch-Screen Mouse & Keyboard Wayland Compositor Wayland + development tools = a lot code!of source Linux system example weston, clayton,mutter,KWin evdev libinput GNOME Shell D radeon nouveau lima etna_viv freedreno tegra-re lima nouveau radeon freedreno etna_viv e libwayland-server libwayland-server s Cinnamon k t o kms p Linux kernel, Linux kernel, Plasma 2 w i (Kernel Mode Setting) Mode (Kernel d g Cairo-Dock e t s drm (Direct Rendering Manager) Rendering (Direct drm cache coherent L2-Caches L2-Caches cache coherent CPU &GPU Enlight. DR19 System libraries: System oflibraries): form (in the Toolkits Interface User µClibc Pango glibc glibc main memory possibly adaptations to Wayland/Mir libwayland / COGL libwayland Cairo Cairo (Xr) GTK+ Clutter 2D Application 2D GModule GThread GThread GLib GObject Glib GIO ATK devicedrivers other& modules System -
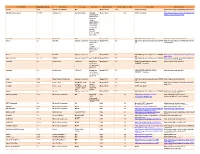
Third Party Version
Third Party Name Third Party Version Manufacturer License Type Comments Merge Product Merge Product Versions License details Software source autofac 3.5.2 Autofac Contributors MIT Merge Cardio 10.2 SOUP repository https://www.nuget.org/packages/Autofac/3.5 .2 Gibraltar Loupe Agent 2.5.2.815 eSymmetrix Gibraltor EULA Gibraltar Merge Cardio 10.2 SOUP repository https://my.gibraltarsoftware.com/Support/Gi Loupe Agent braltar_2_5_2_815_Download will be used within the Cardio Application to view events and metrics so you can resolve support issues quickly and easily. Modernizr 2.8.3 Modernizr MIT Merge Cadio 6.0 http://modernizr.com/license/ http://modernizr.com/download/ drools 2.1 Red Hat Apache License 2.0 it is a very old Merge PACS 7.0 http://www.apache.org/licenses/LICENSE- http://mvnrepository.com/artifact/drools/dro version of 2.0 ols-spring/2.1 drools. Current version is 6.2 and license type is changed too drools 6.3 Red Hat Apache License 2.0 Merge PACS 7.1 http://www.apache.org/licenses/LICENSE- https://github.com/droolsjbpm/drools/releases/ta 2.0 g/6.3.0.Final HornetQ 2.2.13 v2.2..13 JBOSS Apache License 2.0 part of JBOSS Merge PACS 7.0 http://www.apache.org/licenses/LICENSE- http://mvnrepository.com/artifact/org.hornet 2.0 q/hornetq-core/2.2.13.Final jcalendar 1.0 toedter.com LGPL v2.1 MergePacs Merge PACS 7.0 GNU LESSER GENERAL PUBLIC http://toedter.com/jcalendar/ server uses LICENSE Version 2. v1, and viewer uses v1.3. -
Up & Running with Wxpython Robin Dunn Patrick O'brien O'reill
wxPython in a Nutshell Robin Dunn http://wxPython.org/ O’Reilly Open Source Convention July 26–30, 2004 wxPython: Cross Platform GUI Toolkit 1 The best way to eat an elephant… wxPython: Cross Platform GUI Toolkit 2 …is one bite at a time wxPython: Cross Platform GUI Toolkit 3 Why wxPython? • wxPython is an open source GUI toolkit based on the wxWidgets (formerly wxWindows) library • Designed to be cross-platform and supports most Unix/Linux platforms, MS Windows and Mac OS X • Uses native widgets wherever possible to preserve native Look and Feel. • Extensive sample programs, helpful and capable community • Mature, well established projects. – wxWidgets: 1992 – wxPython: 1996 wxPython: Cross Platform GUI Toolkit 4 Getting started with wxPython • Choose an installer – http://wxPython.org/downloads.php – Windows *.exe installers, Linux RPMs or OSX *.dmg – Can be built from source with a few prerequisites • Which version of Python do you use? – 2.3, 2.4, 2.5 • Unicode or ANSI? – Unicode builds available on all platforms, but be careful with Win9x/ME – ANSI available for platforms, but may be phased out soon. wxPython: Cross Platform GUI Toolkit 5 Getting started with wxPython • Choose an editor or development environment: – Boa Constructor – WingIDE – SPE – SCiTE – Emacs, vi, etc. • It’s just plain text, so any ordinary editor and command line will do. wxPython: Cross Platform GUI Toolkit 6 Getting started with wxPython • Ready, set, go! • The wxPython Demo is a great way to learn about the capabilities of the toolkit. wxPython: Cross Platform -
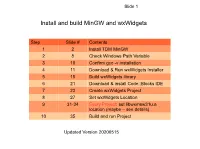
Install and Build Mingw and Wxwidgets
Slide 1 Install and build MinGW and wxWidgets Step Slide # Contents 1 2 Install TDM MinGW 2 8 Check Windows Path Variable 3 10 Confirm gcc -v installation 4 11 Download & Run wxWidgets Installer 5 15 Build wxWidgets library 6 21 Download & install Code::Blocks IDE 7 23 Create wxWidgets Project 8 27 Set wxWidgets Location 9 31-34 Every Project: set libwxmsw31u.a location (maybe – see details) 10 35 Build and run Project Updated Version 20200515 Slide 2 Install TDM MinGW GCC Compiler Note: This is TDM -GCC 5.1 Slide 3 Download URL: https://jmeubank.github.io/tdm-gcc/download/ Download the Win32api installer Slide 4 Create a new installation Slide 5 64it install Slide 6 Install directory off C:\ which is the root directory Slide 7 1. Confirm installed properly Slide 8 Not necessary with TDM-GCC64 Install 2. Check the Windows Path environment variable NOT NECESSARY Windows->Computer(Rt Click)->Properties-> ARCHIVE ONLY to include path to Advanced system settings->System Properties-> Select options below Environment Variables Slide 9 Not necessary with ARCHIVE ONLY – NOT NECESSARY TDM-GCC64 Install This should be automatic with the TDM-GCC install Make sure there is no other conflicting path to C:\MinGW within the 'Path' value Slide 10 Go to command prompt 'cmd' and confirm that gcc is installed and Path Variable is correctly set Enter 'gcc -v' as command – get response below Test the GCC installation – ‘gcc -v’ Slide 11 Download wxWidgets Slide 12 Installer Slide 13 Run the wxWidgets 3.1.x installer Slide 14 Make sure the installation Is into the root directory i.e. -

Comparative Studies of Six Programming Languages
Comparative Studies of Six Programming Languages Zakaria Alomari Oualid El Halimi Kaushik Sivaprasad Chitrang Pandit Concordia University Concordia University Concordia University Concordia University Montreal, Canada Montreal, Canada Montreal, Canada Montreal, Canada [email protected] [email protected] [email protected] [email protected] Abstract Comparison of programming languages is a common topic of discussion among software engineers. Multiple programming languages are designed, specified, and implemented every year in order to keep up with the changing programming paradigms, hardware evolution, etc. In this paper we present a comparative study between six programming languages: C++, PHP, C#, Java, Python, VB ; These languages are compared under the characteristics of reusability, reliability, portability, availability of compilers and tools, readability, efficiency, familiarity and expressiveness. 1. Introduction: Programming languages are fascinating and interesting field of study. Computer scientists tend to create new programming language. Thousand different languages have been created in the last few years. Some languages enjoy wide popularity and others introduce new features. Each language has its advantages and drawbacks. The present work provides a comparison of various properties, paradigms, and features used by a couple of popular programming languages: C++, PHP, C#, Java, Python, VB. With these variety of languages and their widespread use, software designer and programmers should to be aware