A Note on the Intersection of Two Veronese Surfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -

Polynomial Curves and Surfaces
Polynomial Curves and Surfaces Chandrajit Bajaj and Andrew Gillette September 8, 2010 Contents 1 What is an Algebraic Curve or Surface? 2 1.1 Algebraic Curves . .3 1.2 Algebraic Surfaces . .3 2 Singularities and Extreme Points 4 2.1 Singularities and Genus . .4 2.2 Parameterizing with a Pencil of Lines . .6 2.3 Parameterizing with a Pencil of Curves . .7 2.4 Algebraic Space Curves . .8 2.5 Faithful Parameterizations . .9 3 Triangulation and Display 10 4 Polynomial and Power Basis 10 5 Power Series and Puiseux Expansions 11 5.1 Weierstrass Factorization . 11 5.2 Hensel Lifting . 11 6 Derivatives, Tangents, Curvatures 12 6.1 Curvature Computations . 12 6.1.1 Curvature Formulas . 12 6.1.2 Derivation . 13 7 Converting Between Implicit and Parametric Forms 20 7.1 Parameterization of Curves . 21 7.1.1 Parameterizing with lines . 24 7.1.2 Parameterizing with Higher Degree Curves . 26 7.1.3 Parameterization of conic, cubic plane curves . 30 7.2 Parameterization of Algebraic Space Curves . 30 7.3 Automatic Parametrization of Degree 2 Curves and Surfaces . 33 7.3.1 Conics . 34 7.3.2 Rational Fields . 36 7.4 Automatic Parametrization of Degree 3 Curves and Surfaces . 37 7.4.1 Cubics . 38 7.4.2 Cubicoids . 40 7.5 Parameterizations of Real Cubic Surfaces . 42 7.5.1 Real and Rational Points on Cubic Surfaces . 44 7.5.2 Algebraic Reduction . 45 1 7.5.3 Parameterizations without Real Skew Lines . 49 7.5.4 Classification and Straight Lines from Parametric Equations . 52 7.5.5 Parameterization of general algebraic plane curves by A-splines . -

Construction of Rational Surfaces of Degree 12 in Projective Fourspace
Construction of Rational Surfaces of Degree 12 in Projective Fourspace Hirotachi Abo Abstract The aim of this paper is to present two different constructions of smooth rational surfaces in projective fourspace with degree 12 and sectional genus 13. In particular, we establish the existences of five different families of smooth rational surfaces in projective fourspace with the prescribed invariants. 1 Introduction Hartshone conjectured that only finitely many components of the Hilbert scheme of surfaces in P4 contain smooth rational surfaces. In 1989, this conjecture was positively solved by Ellingsrud and Peskine [7]. The exact bound for the degree is, however, still open, and hence the question concerning the exact bound motivates us to find smooth rational surfaces in P4. The goal of this paper is to construct five different families of smooth rational surfaces in P4 with degree 12 and sectional genus 13. The rational surfaces in P4 were previously known up to degree 11. In this paper, we present two different constructions of smooth rational surfaces in P4 with the given invariants. Both the constructions are based on the technique of “Beilinson monad”. Let V be a finite-dimensional vector space over a field K and let W be its dual space. The basic idea behind a Beilinson monad is to represent a given coherent sheaf on P(W ) as a homology of a finite complex whose objects are direct sums of bundles of differentials. The differentials in the monad are given by homogeneous matrices over an exterior algebra E = V V . To construct a Beilinson monad for a given coherent sheaf, we typically take the following steps: Determine the type of the Beilinson monad, that is, determine each object, and then find differentials in the monad. -

A Brief Note on the Approach to the Conic Sections of a Right Circular Cone from Dynamic Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by EPrints Complutense A brief note on the approach to the conic sections of a right circular cone from dynamic geometry Eugenio Roanes–Lozano Abstract. Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5, Calques 3D and Cabri Geometry 3D. An obvious application of this software that has been addressed by several authors is obtaining the conic sections of a right circular cone: the dynamic capabilities of 3D DGS allows to slowly vary the angle of the plane w.r.t. the axis of the cone, thus obtaining the different types of conics. In all the approaches we have found, a cone is firstly constructed and it is cut through variable planes. We propose to perform the construction the other way round: the plane is fixed (in fact it is a very convenient plane: z = 0) and the cone is the moving object. This way the conic is expressed as a function of x and y (instead of as a function of x, y and z). Moreover, if the 3D DGS has algebraic capabilities, it is possible to obtain the implicit equation of the conic. Mathematics Subject Classification (2010). Primary 68U99; Secondary 97G40; Tertiary 68U05. Keywords. Conics, Dynamic Geometry, 3D Geometry, Computer Algebra. 1. Introduction Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5 [2], Calques 3D [7, 10] and Cabri Geometry 3D [11]. Focusing on the most widespread one (GeoGebra 5) and conics, there is a “conics” icon in the ToolBar. -

Chapter 9: Conics Section 9.1 Ellipses
Chapter 9: Conics Section 9.1 Ellipses ..................................................................................................... 579 Section 9.2 Hyperbolas ............................................................................................... 597 Section 9.3 Parabolas and Non-Linear Systems ......................................................... 617 Section 9.4 Conics in Polar Coordinates..................................................................... 630 In this chapter, we will explore a set of shapes defined by a common characteristic: they can all be formed by slicing a cone with a plane. These families of curves have a broad range of applications in physics and astronomy, from describing the shape of your car headlight reflectors to describing the orbits of planets and comets. Section 9.1 Ellipses The National Statuary Hall1 in Washington, D.C. is an oval-shaped room called a whispering chamber because the shape makes it possible for sound to reflect from the walls in a special way. Two people standing in specific places are able to hear each other whispering even though they are far apart. To determine where they should stand, we will need to better understand ellipses. An ellipse is a type of conic section, a shape resulting from intersecting a plane with a cone and looking at the curve where they intersect. They were discovered by the Greek mathematician Menaechmus over two millennia ago. The figure below2 shows two types of conic sections. When a plane is perpendicular to the axis of the cone, the shape of the intersection is a circle. A slightly titled plane creates an oval-shaped conic section called an ellipse. 1 Photo by Gary Palmer, Flickr, CC-BY, https://www.flickr.com/photos/gregpalmer/2157517950 2 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only ellipse and circle by L Michaels, CC BY 3.0 This chapter is part of Precalculus: An Investigation of Functions © Lippman & Rasmussen 2020. -
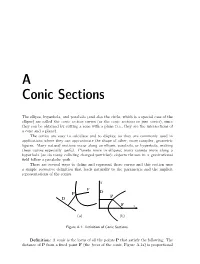
A Conic Sections
A Conic Sections The ellipse, hyperbola, and parabola (and also the circle, which is a special case of the ellipse) are called the conic section curves (or the conic sections or just conics), since they can be obtained by cutting a cone with a plane (i.e., they are the intersections of a cone and a plane). The conics are easy to calculate and to display, so they are commonly used in applications where they can approximate the shape of other, more complex, geometric figures. Many natural motions occur along an ellipse, parabola, or hyperbola, making these curves especially useful. Planets move in ellipses; many comets move along a hyperbola (as do many colliding charged particles); objects thrown in a gravitational field follow a parabolic path. There are several ways to define and represent these curves and this section uses asimplegeometric definition that leads naturally to the parametric and the implicit representations of the conics. y F P D P D F x (a) (b) Figure A.1: Definition of Conic Sections. Definition: A conic is the locus of all the points P that satisfy the following: The distance of P from a fixed point F (the focus of the conic, Figure A.1a) is proportional 364 A. Conic Sections to its distance from a fixed line D (the directrix). Using set notation, we can write Conic = {P|PF = ePD}, where e is the eccentricity of the conic. It is easy to classify conics by means of their eccentricity: =1, parabola, e = < 1, ellipse (the circle is the special case e = 0), > 1, hyperbola. -

Section 9.2 Hyperbolas 597
Section 9.2 Hyperbolas 597 Section 9.2 Hyperbolas In the last section, we learned that planets have approximately elliptical orbits around the sun. When an object like a comet is moving quickly, it is able to escape the gravitational pull of the sun and follows a path with the shape of a hyperbola. Hyperbolas are curves that can help us find the location of a ship, describe the shape of cooling towers, or calibrate seismological equipment. The hyperbola is another type of conic section created by intersecting a plane with a double cone, as shown below5. The word “hyperbola” derives from a Greek word meaning “excess.” The English word “hyperbole” means exaggeration. We can think of a hyperbola as an excessive or exaggerated ellipse, one turned inside out. We defined an ellipse as the set of all points where the sum of the distances from that point to two fixed points is a constant. A hyperbola is the set of all points where the absolute value of the difference of the distances from the point to two fixed points is a constant. 5 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only a hyperbola by L Michaels, CC BY 3.0 598 Chapter 9 Hyperbola Definition A hyperbola is the set of all points Q (x, y) for which the absolute value of the difference of the distances to two fixed points F1(x1, y1) and F2 (x2, y2 ) called the foci (plural for focus) is a constant k: d(Q, F1 )− d(Q, F2 ) = k . -

NOTES on ELLIPTIC CURVES 1. Motivation: 1.1. Congruent Numbers
NOTES ON ELLIPTIC CURVES MATH 4150 - SPRING 2018 1. Motivation: 1.1. Congruent numbers. In our study of the congruent number problem, we have seen that there are several ways of rephrasing the question of whether a square-free integer n is congruent, and to generate tables of congruent numbers. However, we have also seen that this is numerically infeasible even for small n which are congruent. Worse, if n is not congruent, these procedures do not generate a proof as you don't know how long you have to wait to tell if n is congruent. We have also seen that Fermat-style infinite descent proofs can be given to show that some small numbers, such as n = 1; 2; 3, are not congruent. Ideally, we would like a quick way to test if a number is congruent or not. There is yet another way of rephrasing the problem of congruent numbers which makes this possible. To describe this, we begin with a strange-looking, but yet elementary, lemma. For this, recall that the Diophantine system of equations formulation of n being congruent is to say that there exist x; y; z 2 Q such that X2 + Y 2 = Z2; (XY )=2 = n: The lemma is purely a set of algebraic identities, so we omit the proof (as, for the sake of time, we have also omitted the intuitive explanation of where this \strange" lemma comes from). Lemma. There is a one-to-one correspondence 3 2 2 2 2 2 3 2 (X; Y; Z) 2 Q : X + Y = Z ; (XY )=2 = n $ (x; y) 2 Q : y = x − n x; y 6= 0 given explicitly by (X; Y; Z) 7! (nY=(Z −X); 2n2=(Z −X)) in one direction and (x; y) 7! ((x2 − n2)=y; 2nx=y; (x2 + n2)=y) in the other. -

Rational Distance Sets on Conic Sections
Rational Distance Sets on Conic Sections Megan D. Ly Shawn E. Tsosie Lyda P. Urresta Loyola Marymount UMASS Amherst Union College July 2010 Abstract Leonhard Euler noted that there exists an infinite set of rational points on the unit circle such that the pairwise distance of any two is also rational; the same statement is nearly always true for lines and other circles. In 2004, Garikai Campbell considered the question of a rational distance set consisting of four points on a parabola. We introduce new ideas to discuss a rational distance set of four points on a hyperbola. We will also discuss the issues with generalizing to a rational distance set of five points on an arbitrary conic section. 1 Introduction A rational distance set is a set whose elements are points in R2 which have pairwise rational distance. Finding these sets is a difficult problem, and the search for rational distance sets with rational coordinates is even more difficult. The search for rational distance sets has a long history. Leonard Euler noted that there exists an infinite set of rational points on the unit circle such that the pairwise distance of any two is also rational. In 1945 Stanislaw Ulam posed a question about a rational distance set: is there an everywhere dense rational distance set in the plane [2]? Paul Erd¨osalso considered the problem and he conjectured that the only irreducible algebraic curves which have an infinite rational distance set are the line and the circle [4]. This was later proven to be true by Jozsef Solymosi and Frank de Zeeuw [4]. -

Conic Sections
Conic sections Conics have recurred throughout this book in both geometric and algebraic settings. Hence, I have decided to dedicate the final chapter to them. As the only conics appearing on IMO geometry problems are invariably circles, the results proved in this chapter are largely irrelevant. Nevertheless, the material is sufficiently interesting to be worthy of inclusion. Sections of cones With the obvious exception of the circle, the conics were first discovered by the Greek mathematician Menaech- mus who contemplated slicing a right circular cone C with a flat plane . Indeed, the term ‘conic’ is an abbrevia- tion of conic section . It is more natural to consider C as the double cone with equation x2 y2 z2. If cuts both cones, then the conic section is a hyperbola . If it cuts only one cone in a closed curve, it is an ellipse . The intermediate case, where the plane is inclined at exactly the same slope as the cone, results in a parabola . Observe that x2 y2 z2 is the equation of a projective circle; this explains why all conic sections are equivalent under projective transformations. We define a Dandelin sphere 5 to be a sphere tangent to both C (at a circle *) and (at a point F, namely the focus ). The plane containing * intersects at a line ", known as the directrix . 1. Prove that the directrix is the polar of the focus. For an arbitrary point P on the conic, we let P R meet * at Q. 2. Prove that P Q P F . 3. Let A be the foot of the perpendicular from P to the plane containing *. -

Entry Curves
ENTRY CURVES [ENTRY CURVES] Authors: Oliver Knill, Andrew Chi, 2003 Literature: www.mathworld.com, www.2dcurves.com astroid An [astroid] is the curve t (cos3(t); a sin3(t)) with a > 0. An asteroid is a 4-cusped hypocycloid. It is sometimes also called a tetracuspid,7! cubocycloid, or paracycle. Archimedes spiral An [Archimedes spiral] is a curve described as the polar graph r(t) = at where a > 0 is a constant. In words: the distance r(t) to the origin grows linearly with the angle. bowditch curve The [bowditch curve] is a special Lissajous curve r(t) = (asin(nt + c); bsin(t)). brachistochone A [brachistochone] is a curve along which a particle will slide in the shortest time from one point to an other. It is a cycloid. Cassini ovals [Cassini ovals] are curves described by ((x + a) + y2)((x a)2 + y2) = k4, where k2 < a2 are constants. They are named after the Italian astronomer Goivanni Domenico− Cassini (1625-1712). Geometrically Cassini ovals are the set of points whose product to two fixed points P = ( a; 0); Q = (0; 0) in the plane is the constant k 2. For k2 = a2, the curve is called a Lemniscate. − cardioid The [cardioid] is a plane curve belonging to the class of epicycloids. The fact that it has the shape of a heart gave it the name. The cardioid is the locus of a fixed point P on a circle roling on a fixed circle. In polar coordinates, the curve given by r(φ) = a(1 + cos(φ)). catenary The [catenary] is the plane curve which is the graph y = c cosh(x=c). -

Geometry I Alexander I
Geometry I Alexander I. Bobenko Draft from February 13, 2017 Preliminary version. Partially extended and partially incomplete. Based on the lecture Geometry I (Winter Semester 2016 TU Berlin). Written by Thilo Rörig based on the Geometry I course and the Lecture Notes of Boris Springborn from WS 2007/08. Acknoledgements: We thank Alina Hinzmann and Jan Techter for the help with preparation of these notes. Contents 1 Introduction 1 2 Projective geometry 3 2.1 Introduction . .3 2.2 Projective spaces . .5 2.2.1 Projective subspaces . .6 2.2.2 Homogeneous and affine coordinates . .7 2.2.3 Models of real projective spaces . .8 2.2.4 Projection of two planes onto each other . 10 2.2.5 Points in general position . 12 2.3 Desargues’ Theorem . 13 2.4 Projective transformations . 15 2.4.1 Central projections and Pappus’ Theorem . 18 2.5 The cross-ratio . 21 2.5.1 Projective involutions of the real projective line . 25 2.6 Complete quadrilateral and quadrangle . 25 2.6.1 Möbius tetrahedra and Koenigs cubes . 29 2.6.2 Projective involutions of the real projective plane . 31 2.7 The fundamental theorem of real projective geometry . 32 2.8 Duality . 35 2.9 Conic sections – The Euclidean point of view . 38 2.9.1 Optical properties of the conic sections . 41 2.10 Conics – The projective point of view . 42 2.11 Pencils of conics . 47 2.12 Rational parametrizations of conics . 49 2.13 The pole-polar relationship, the dual conic and Brianchon’s theorem . 51 2.14 Confocal conics and elliptic billiard .